一种破渣装置及带有破渣装置的工业机器人的制作方法
本发明属于冶金设备,涉及一种破渣装置及带有破渣装置的工业机器人。
背景技术:
1、冶金生产流程中有大量的工艺过程需要对熔融的高温金属进行温度检测和成分检测,在测温或取样检测时,测温或取样探头需穿过金属液面渣层并插入熔融金属一定深度,才能进行测温或取样检测。但是由于渣层较硬,并且多数情况下都结为硬壳,一般在检测前需要进行破渣操作。目前大多数钢水破渣都是由人工进行操作,但是生产环境恶劣,并且检测和取样工作较为频繁,导致该岗位工人劳动强度较大,并且在破渣的过程中还存在一定的风险,如突发情况钢液飞溅等,工人来不及躲避,还会造成意外的人身伤害,危险系数大。
2、随着机器人技术的发展,冶金领域使用工业机器人替代人工操作的场合越来越多。工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。但是将工业机器人应用到钢水破渣时,通常是将破渣装置通过法兰或快换盘连接在工业机器人的机械手末端(又称为第六轴的末端),由于渣层存在凹凸不平、渣壳太硬等情况,会导致破渣装置在破渣过程中产生较大弯矩、瞬时冲击力和震动过大等问题,并通过破渣装置传递给工业机器人的本体,对于工业机器人体会造成损害。
3、因此,目前急需一种用于工业机器人的破渣装置,降低破渣过程中的弯矩、瞬时冲击力以及震动,从而避免对机器人本体造成损害。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种破渣装置及带有破渣装置的工业机器人,降低破渣过程中的弯矩、瞬时冲击力以及震动,从而避免对机器人本体造成损害。
2、为达到上述目的,本发明提供如下技术方案:
3、一种破渣装置,包括从头至尾依次连接的破渣锥、下连杆、缓冲装置以及上连杆,且所述缓冲装置与上连杆之间还设有关节轴承和叉臂,所述关节轴承的外圈与所述上连杆固定连接,所述叉臂固定连接在所述缓冲装置上,所述关节轴承通过贯穿所述关节轴承内圈的销轴与所述叉臂连接,且所述销轴的两端与所述叉臂固定连接。
4、进一步,所述缓冲装置为液压缓冲器、聚氨脂缓冲器或弹簧缓冲器中的一种。
5、进一步,还包括外套于所述上连杆、缓冲装置以及下连杆上的气冷外套,且所述气冷外套的内径大于所述下连杆、缓冲装置以及上连杆的外径以形成冷却气通道,所述气冷外套的尾端设有冷却气进口。
6、进一步,所述冷却气进口上设有连接外部气源的气源接头,气体介质为压缩空气或氮气。
7、进一步,所述气冷外套的尾部设有用于观察渣面的视觉系统。
8、进一步,所述视觉系统为两部设置在所述气冷外套尾部的外径上的工业相机,且两部工业相机呈相对布置。
9、进一步,所述破渣锥的材质为硬质合金或耐火陶瓷。
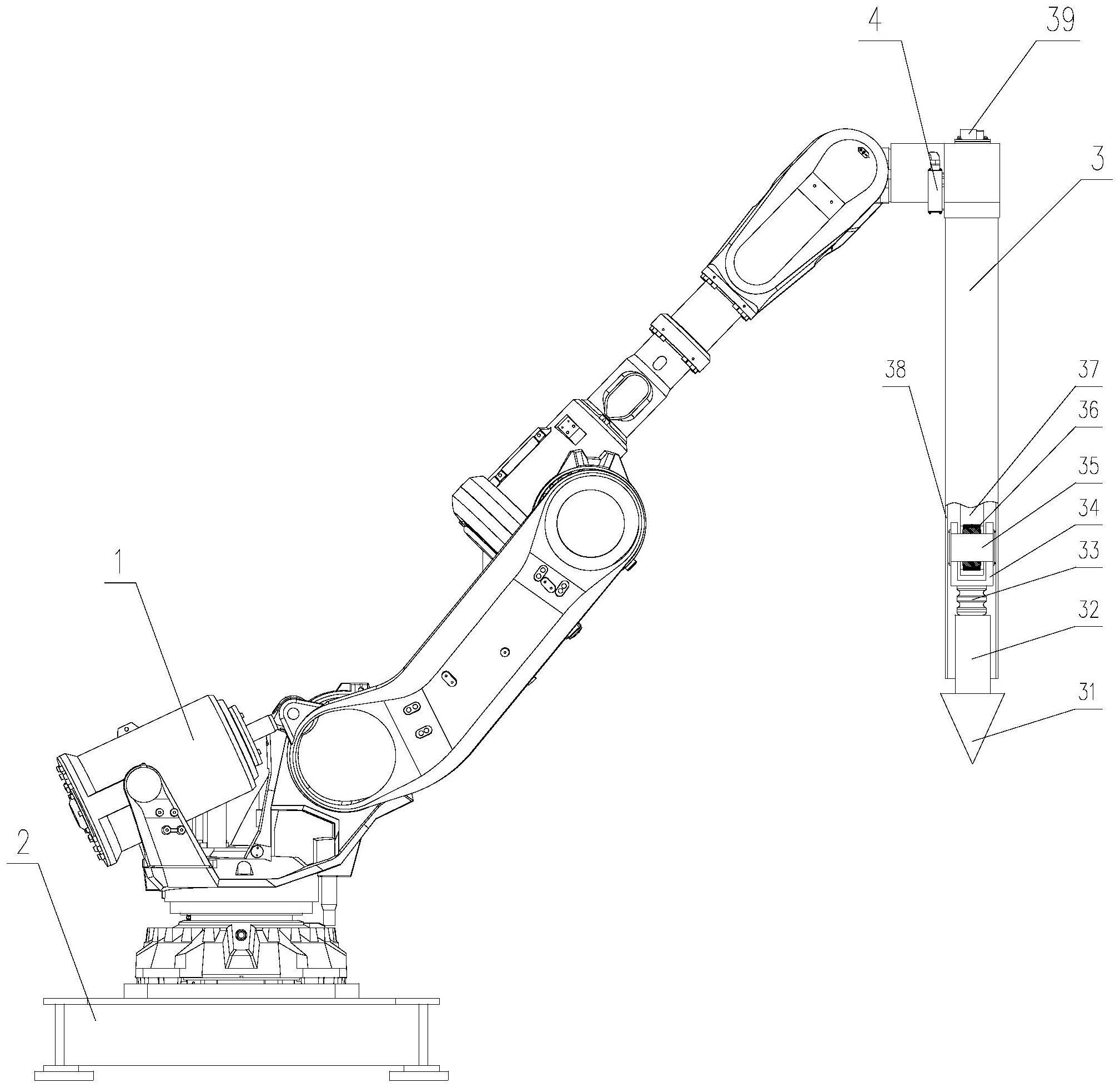
10、一种带有破渣装置的工业机器人,包括上述的一种破渣装置、机器人本体以及安装底座,所述机器人本体设置在所述安装底座上,该破渣装置通过快换盘与机器人本体相连。
11、进一步,所述安装底座为移动式安装底座以便移动机器人本体。
12、本发明的有益效果在于:
13、1、本发明提供的一种工业机器人及用于工业机器人的破渣装置,通过缓冲装置可吸收破渣锥与渣层接触瞬间的冲击力和震动,关节轴承可承受较大载荷的同时也消除了因渣层表面凹凸不平产生的对机器人本体末端的较大弯矩,从而避免对机器人本体造成损害。
14、2、本发明通过视觉系统自动识别出钢液面渣层表面高度及渣层较薄弱处位置并反馈给工业机器人操作系统,工业机器人可根据此数据自动规划破渣路径,操控破渣装置进行破渣操作,从而实现全自动化破渣,整个破渣过程有工业机器人进行操作,无需人工干预,解除了工人的重复劳动,提高了破渣效率,降低了操作风险,延长了机器人寿命;同时,通过冷却气进口向冷却气通道喷吹压缩气体介质,对破渣装置中的各个结构进行冷却和吹扫,避免了高温带来的不利影响。
15、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
技术特征:
1.一种破渣装置,其特征在于:包括从头至尾依次连接的破渣锥(31)、下连杆(32)、缓冲装置(33)以及上连杆(37),且所述缓冲装置(33)与上连杆(37)之间还设有关节轴承(36)和叉臂(34),所述关节轴承(36)的外圈与所述上连杆(37)固定连接,所述叉臂(34)固定连接在所述缓冲装置(33)上,所述关节轴承(36)通过贯穿所述关节轴承(36)内圈的销轴(35)与所述叉臂(34)连接,且所述销轴(35)的两端与所述叉臂(34)固定连接。
2.根据权利要求1所述的一种破渣装置,其特征在于:所述缓冲装置(33)为液压缓冲器、聚氨脂缓冲器或弹簧缓冲器中的一种。
3.根据权利要求1所述的一种破渣装置,其特征在于:还包括外套于所述上连杆(37)、缓冲装置(33)以及下连杆(32)上的气冷外套(38),且所述气冷外套(38)的内径大于所述下连杆(32)、缓冲装置(33)以及上连杆(37)的外径以形成冷却气通道,所述气冷外套(38)的尾端设有冷却气进口。
4.根据权利要求3所述的一种破渣装置,其特征在于:所述冷却气进口上设有连接外部气源的气源接头(39),气体介质为压缩空气或氮气。
5.根据权利要求4所述的一种破渣装置,其特征在于:所述气冷外套(38)的尾部设有用于观察渣面的视觉系统(4)。
6.根据权利要求5所述的一种破渣装置,其特征在于:所述视觉系统(4)为两部设置在所述气冷外套(38)尾部的外径上的工业相机,且两部工业相机呈相对布置。
7.根据权利要求1所述的一种破渣装置,其特征在于:所述破渣锥(31)的材质为硬质合金或耐火陶瓷。
8.一种带有破渣装置的工业机器人,其特征在于:包括根据权利要求1~7任一项中所述的一种破渣装置、机器人本体(1)以及安装底座(2),所述机器人本体(1)设置在所述安装底座(2)上,该破渣装置(3)通过快换盘与机器人本体(1)相连。
9.根据权利要求8所述的一种带有破渣装置的工业机器人,其特征在于:所述安装底座(2)为移动式安装底座(2)以便移动机器人本体(1)。
技术总结
本发明属于冶金设备技术领域,涉及一种破渣装置及带有破渣装置的工业机器人,该工业机器人包括破渣装置、机器人本体以及安装底座,机器人本体设置在安装底座上,破渣装置通过快换盘与机器人本体相连,该破渣装置包括从头至尾依次连接的破渣锥、下连杆、缓冲装置以及上连杆,且缓冲装置与上连杆之间还设有关节轴承和叉臂,关节轴承的外圈与上连杆固定连接,叉臂固定连接在缓冲装置上,关节轴承通过贯穿关节轴承内圈的销轴与叉臂连接,且销轴的两端与叉臂固定连接。本发明过缓冲装置吸收破渣锥与渣层接触瞬间的冲击力和震动,关节轴承承受较大载荷的同时也消除了因渣层表面凹凸不平产生的对机器人本体末端的较大弯矩,避免对机器人本体造成损害。
技术研发人员:任鲲先,刘向东,吴曼玲
受保护的技术使用者:中冶赛迪技术研究中心有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!