一种智能电能表生产用机械手臂的制作方法
本发明属于电表生产,特别是涉及一种智能电能表生产用机械手臂。
背景技术:
1、授权公告号为cn213412036u的中国专利公开了一种智能电能表生产线用的机械手臂,其通过滑轨控制滑块移动到电能表传送台上方,第一液压缸启动,带动安装板向下移动,使得负压吸盘吸附在电能表表盖上,随后第一液压缸的输出轴收回,带动电能表表盖上移将表盖打开;随后滑轨控制滑块移动到下铭牌正上方,从而带动负压吸盘移动到下铭牌正上方,随后第一液压缸启动,带动安装板向下移动,从而使得负压吸盘压紧在下铭牌上,并启动负压泵使得负压吸盘内产生负压,将下铭牌吸附在负压吸盘上;第二液压缸启动,第二液压缸的输出轴伸出,从而使得压块将下铭牌的两侧边下压;第一液压缸的输出轴缩回,带动安装板上移;滑轨启动带动滑块移动到电能表传送台上方,第一液压缸再次启动,第一液压缸带动安装板下移,使得下铭牌与电能表相贴,随后第二液压缸的输出轴缩回,压块不在压住下铭牌,下铭牌展开,从而卡入电能表的下铭牌安装槽中,同时负压泵对负压吸盘反向充气,使得负压吸盘松开下铭牌,实现下铭牌的机械化装配。上述装置存在以下弊端:1)通过滑轨滑块等元件来回转移下铭牌,工作效率较低;2)虽然负压吸盘将下铭牌吸住时压块将下铭牌的两侧边下压,但是当第一液压缸经安装板带动下铭牌移动至电能表的下铭牌安装槽内后,其利用下铭牌的自身弹性卡入电能表的下铭牌安装槽内,这可能导致下铭牌的下表面跟下铭牌安装槽的表面并没有完全贴合在一起,也就是说下铭牌未完全卡入下铭牌安装槽内,从而造成电能表在后续加工时下铭牌从下铭牌安装槽内脱落,影响电能表的生产效率。因此,亟待研究一种智能电能表生产用机械手臂,以便于解决上述问题。
技术实现思路
1、本发明在于提供一种智能电能表生产用机械手臂,其目的是为了解决上述背景技术中所提出的技术问题。
2、为解决上述技术问题,本发明是通过以下技术方案实现的:
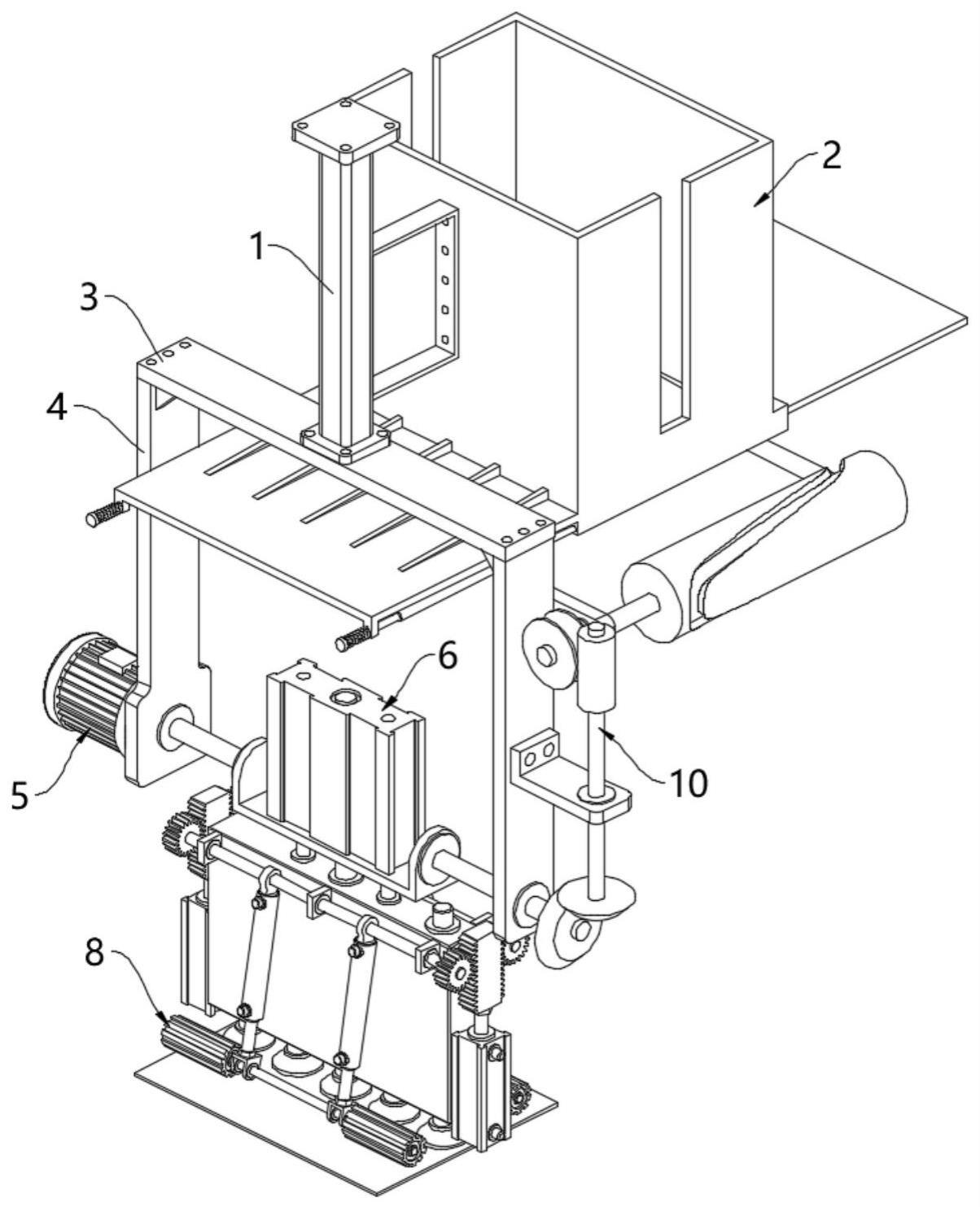
3、本发明为一种智能电能表生产用机械手臂,包括竖直固定的吊装臂;所述吊装臂的一侧装设有供料组件;所述吊装臂的下端水平固定有支撑板条;所述支撑板条的相对两端均竖直固定有侧撑板条;两所述侧撑板条的下端之间装设有旋转组件;所述旋转组件上装设有升降组件;所述升降组件上装设有负压抽气盒;所述负压抽气盒远离升降组件的一表面垂直连接有多个并排设置的负压吸嘴;所述负压抽气盒上装设有辊压组件。
4、作为本发明的一种优选技术方案,所述供料组件包括上部为敞口结构的储料箱;所述储料箱通过竖直设置的安装框固定于吊装臂的一侧面上;所述储料箱靠近吊装臂的一侧壁下边缘开设有出料通道;所述出料通道的外端口上边缘处水平固定有挡位板;所述储料箱远离吊装臂的一侧壁下边缘设置有凸出部;所述凸出部具有与出料通道相对应的导向通道;所述导向通道内滑动穿插有水平设置的推料板;所述储料箱的底壁开设有定向通道;所述定向通道的相对两端分别与出料通道及导向通道相连通;所述推料板的下表面水平固定有与定向通道相对应的导向凸;所述导向凸滑动配合于定向通道内;所述储料箱的一侧设置有第一支撑块;所述第一支撑块固定于一侧撑板条上;所述第一支撑块上转动穿插有水平设置的第一传动轴;所述第一传动轴的长度方向与定向通道的长度方向平行设置;所述第一传动轴的一端同轴固定有圆柱凸轮;所述圆柱凸轮的工作槽内滑动插接有驱动柱;所述驱动柱的一端垂直固定于导向凸上。
5、作为本发明的一种优选技术方案,所述旋转组件包括呈u型结构的活动座;所述活动座设置于两侧撑板条之间;所述活动座的相对两侧臂均水平固定有旋转轴;两所述旋转轴分别转动连接于两侧撑板条的下端上;一所述旋转轴的一端同轴固定于一伺服电机的输出轴上;所述伺服电机水平固定于另一侧撑板条上。
6、作为本发明的一种优选技术方案,所述挡位板的下方装设有限位组件;所述限位组件包括一对分别水平设置于挡位板相对两侧边下方的连接轴;所述连接轴的长度方向与定向通道的长度方向平行设置;所述连接轴上固定有限位片;所述限位片与挡位板之间形成对下铭牌的容纳空间;所述连接轴的一端转动连接于储料箱上;所述连接轴的另一端转动套设有安装块;所述安装块固定于挡位板的下表面上;所述安装块的一表面连接有扭簧;所述扭簧的一端连接于连接轴的圆周外壁上;所述扭簧套设于连接轴的外周上。
7、作为本发明的一种优选技术方案,所述第一传动轴与另一旋转轴之间通过传动组件相连接;所述传动组件包括固定于一侧撑板条上的第二支撑块;所述第二支撑块上转动穿插有竖直设置的第二传动轴;所述第二传动轴的上端同轴固定有传动蜗杆;所述传动蜗杆上啮合有传动蜗轮;所述传动蜗轮同轴固定于第一传动轴的另一端上;所述第二传动轴的下端水平固定有第一锥齿轮;所述第一锥齿轮上啮合有第二锥齿轮;所述第二锥齿轮固定于另一旋转轴的一端上。
8、作为本发明的一种优选技术方案,所述升降组件包括固定于活动座中间臂上的第一气缸;所述第一气缸的输出端伸缩方向与活动座的侧臂长度方向平行设置;所述负压抽气盒固定于第一气缸的输出端上。
9、作为本发明的一种优选技术方案,所述辊压组件包括一对分别设置于负压抽气盒相对两侧的驱动轴;所述驱动轴上转动套设有多个并排设置的承载块;所述承载块固定于负压抽气盒靠近第一气缸的一侧边处;所述驱动轴的一侧径向设置有多个第二气缸;所述第二气缸的尾端转动连接于驱动轴上;所述第二气缸的输出端固定有u型块;位于负压抽气盒同一侧的多个所述u型块之间通过与驱动轴相平行的辊轴相连接;所述辊轴转动穿插于u型块的相对两侧臂上;所述辊轴的两端均同轴固定有压辊;所述压辊的圆周外壁轴向开设有多个凹槽;两所述驱动轴之间并排设置有一对第三气缸;两所述第三气缸分别固定于负压抽气盒的相对两侧面上;所述第三气缸的输出端伸缩方向与第一气缸的输出端伸缩方向平行设置;所述第三气缸的输出端轴向固定有双面齿条;所述双面齿条的两齿牙段上均啮合有与驱动轴相对应的传动齿轮;所述传动齿轮固定于驱动轴的端部上。
10、本发明具有以下有益效果:
11、本发明通过将多个下铭牌叠摞于供料组件内,利用旋转组件经升降组件将负压抽气盒转动至供料组件与旋转组件之间后通过负压吸嘴吸住一个从供料组件内排出的下铭牌,然后通过旋转组件将负压抽气盒转动至旋转组件的下方,并利用辊压组件将下铭牌的相对两侧边压弯,然后再利用升降组件经负压抽气盒将下铭牌压入其下方的电能表上,最后再通过辊压组件对下铭牌进行辊压,从而能够保证下铭牌稳定卡入电能表上,有效地保证了电能表的生产效率,避免了电能表在后续加工时下铭牌从下铭牌安装槽内脱落等问题,实用性较强,具有较高的市场应用价值。
12、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种智能电能表生产用机械手臂,其特征在于,包括竖直固定的吊装臂(1);
2.根据权利要求1所述的一种智能电能表生产用机械手臂,其特征在于,所述供料组件(2)包括上部为敞口结构的储料箱(201);所述储料箱(201)通过竖直设置的安装框(202)固定于吊装臂(1)的一侧面上;所述储料箱(201)靠近吊装臂(1)的一侧壁下边缘开设有出料通道(2011);所述出料通道(2011)的外端口上边缘处水平固定有挡位板(203);所述储料箱(201)远离吊装臂(1)的一侧壁下边缘设置有凸出部(2012);所述凸出部(2012)具有与出料通道(2011)相对应的导向通道(2013);所述导向通道(2013)内滑动穿插有水平设置的推料板(204)。
3.根据权利要求2所述的一种智能电能表生产用机械手臂,其特征在于,所述储料箱(201)的底壁开设有定向通道(2014);所述定向通道(2014)的相对两端分别与出料通道(2011)及导向通道(2013)相连通;所述推料板(204)的下表面水平固定有与定向通道(2014)相对应的导向凸(2041);所述导向凸(2041)滑动配合于定向通道(2014)内。
4.根据权利要求3所述的一种智能电能表生产用机械手臂,其特征在于,所述储料箱(201)的一侧设置有第一支撑块(205);所述第一支撑块(205)固定于一侧撑板条(4)上;所述第一支撑块(205)上转动穿插有水平设置的第一传动轴(206);所述第一传动轴(206)的长度方向与定向通道(2014)的长度方向平行设置;所述第一传动轴(206)的一端同轴固定有圆柱凸轮(207);所述圆柱凸轮(207)的工作槽内滑动插接有驱动柱(208);所述驱动柱(208)的一端垂直固定于导向凸(2041)上。
5.根据权利要求4所述的一种智能电能表生产用机械手臂,其特征在于,所述旋转组件(5)包括呈u型结构的活动座(501);所述活动座(501)设置于两侧撑板条(4)之间;所述活动座(501)的相对两侧臂均水平固定有旋转轴(502);两所述旋转轴(502)分别转动连接于两侧撑板条(4)的下端上;一所述旋转轴(502)的一端同轴固定于一伺服电机(503)的输出轴上;所述伺服电机(503)水平固定于另一侧撑板条(4)上。
6.根据权利要求5所述的一种智能电能表生产用机械手臂,其特征在于,所述挡位板(203)的下方装设有限位组件(9);所述限位组件(9)包括一对分别水平设置于挡位板(203)相对两侧边下方的连接轴(901);所述连接轴(901)的长度方向与定向通道(2014)的长度方向平行设置;所述连接轴(901)上固定有限位片(902);所述限位片(902)与挡位板(203)之间形成对下铭牌的容纳空间;所述连接轴(901)的一端转动连接于储料箱(201)上;所述连接轴(901)的另一端转动套设有安装块(903);所述安装块(903)固定于挡位板(203)的下表面上;所述安装块(903)的一表面连接有扭簧(904);所述扭簧(904)的一端连接于连接轴(901)的圆周外壁上;所述扭簧(904)套设于连接轴(901)的外周上。
7.根据权利要求6所述的一种智能电能表生产用机械手臂,其特征在于,所述第一传动轴(206)与另一旋转轴(502)之间通过传动组件(10)相连接;所述传动组件(10)包括固定于一侧撑板条(4)上的第二支撑块(1001);所述第二支撑块(1001)上转动穿插有竖直设置的第二传动轴(1002);所述第二传动轴(1002)的上端同轴固定有传动蜗杆(1003);所述传动蜗杆(1003)上啮合有传动蜗轮(1004);所述传动蜗轮(1004)同轴固定于第一传动轴(206)的另一端上;所述第二传动轴(1002)的下端水平固定有第一锥齿轮(1005);所述第一锥齿轮(1005)上啮合有第二锥齿轮(1006);所述第二锥齿轮(1006)固定于另一旋转轴(502)的一端上。
8.根据权利要求5所述的一种智能电能表生产用机械手臂,其特征在于,所述升降组件(6)包括固定于活动座(501)中间臂上的第一气缸(601);所述第一气缸(601)的输出端伸缩方向与活动座(501)的侧臂长度方向平行设置;所述负压抽气盒(7)固定于第一气缸(601)的输出端上。
9.根据权利要求8所述的一种智能电能表生产用机械手臂,其特征在于,所述辊压组件(8)包括一对分别设置于负压抽气盒(7)相对两侧的驱动轴(801);所述驱动轴(801)上转动套设有多个并排设置的承载块(802);所述承载块(802)固定于负压抽气盒(7)靠近第一气缸(601)的一侧边处;所述驱动轴(801)的一侧径向设置有多个第二气缸(803);所述第二气缸(803)的尾端转动连接于驱动轴(801)上;所述第二气缸(803)的输出端固定有u型块(804);位于负压抽气盒(7)同一侧的多个所述u型块(804)之间通过与驱动轴(801)相平行的辊轴(805)相连接;所述辊轴(805)转动穿插于u型块(804)的相对两侧臂上;所述辊轴(805)的两端均同轴固定有压辊(806);所述压辊(806)的圆周外壁轴向开设有多个凹槽(8061)。
10.根据权利要求9所述的一种智能电能表生产用机械手臂,其特征在于,两所述驱动轴(801)之间并排设置有一对第三气缸(807);两所述第三气缸(807)分别固定于负压抽气盒(7)的相对两侧面上;所述第三气缸(807)的输出端伸缩方向与第一气缸(601)的输出端伸缩方向平行设置;所述第三气缸(807)的输出端轴向固定有双面齿条(808);所述双面齿条(808)的两齿牙段上均啮合有与驱动轴(801)相对应的传动齿轮(809);所述传动齿轮(809)固定于驱动轴(801)的端部上。
技术总结
本发明公开了一种智能电能表生产用机械手臂,涉及电表生产技术领域。本发明包括竖直固定的吊装臂;吊装臂的一侧装设有供料组件;吊装臂的下端水平固定有支撑板条;支撑板条的相对两端均竖直固定有侧撑板条;两侧撑板条的下端之间装设有旋转组件;旋转组件上装设有升降组件;升降组件上装设有负压抽气盒;负压抽气盒远离升降组件的一表面垂直连接有多个并排设置的负压吸嘴;负压抽气盒上装设有辊压组件。本发明不仅结构设计合理、使用便捷,而且有效地保证了电能表的生产效率,具有较高的市场应用价值。
技术研发人员:王立超,黄龚雨,马东洲,吴承锴,顾忠林
受保护的技术使用者:江苏华源仪器仪表有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!