非线性多机械臂系统的分布式优化控制方法、设备及介质与流程
本技术涉及机械臂控制领域,尤其涉及一种非线性多机械臂系统的分布式优化控制方法、设备以及存储介质。
背景技术:
1、多机械臂的协同合作是当前机械臂研究领域的热点之一。协同多机械手系统的出现,通过提供比单机械手更大的工作空间、更强的工作能力、更灵活的系统结构和更大的负载能力,克服了单机械臂系统的工作极限,从而给完成许多单一机械手无法完成的困难任务,如协同搬运和焊接。虽然多机械手合作比单一机械手有很多优势,然而,它也引入了许多控制问题。与单一机械臂相比,协同多机械臂系统具有更为复杂的组织结构,它不是多个机械臂的简单组合。它需要解决环境相互作用的不确定性、可行的控制方法和优化协调规划的问题。因此,研究非线性多机械臂系统的协调控制方法是机器人领域中的难点问题之一。随着物联网、5g、人工智能、大数据等技术的快速发展,复杂性、网络化和数据量大等点已经成为时代特征。在大数据与网络化迅速发展之际,分布式优化理论、技术及其相关应用受到越来越多的关注。分布式优化问题指将大规模复杂的优化问题分布到多个智能体上进行分布式的计算,各个智能体通过某些预先定义的协调规则进行各自的优化与决策,并通过通信网络不断交换各自信息,最终得到全局目标函数的最优解,其灵活与方便的特点使得分布式优化在诸多工业与科技领域拥有重要的应用前景,例如智能电网、传感器网络、机器学习以及信息物理系统等领域。
2、在分布式算法中,为了摆脱系统初始状态的约束,进一步提高闭环系统在有限时间内的收敛性能,近年来在有限时间稳定性的基础上发展了固定时间稳定性,能够给出一个统一固定的和系统初值无关的收敛时间。但针对非线性多机械臂系统,关于固定时间分布式优化的结果仍少之又少,亟待解决。
3、申请内容
4、本技术的主要目的在于提供一种非线性多机械臂系统的分布式优化控制方法、设备及介质,旨在解决现有非线性多机械臂系统难以实现统一固定且和系统初值无关的收敛时间的技术问题。
5、为实现上述目的,本技术提供一种非线性多机械臂系统的分布式优化控制方法,所述方法包括:
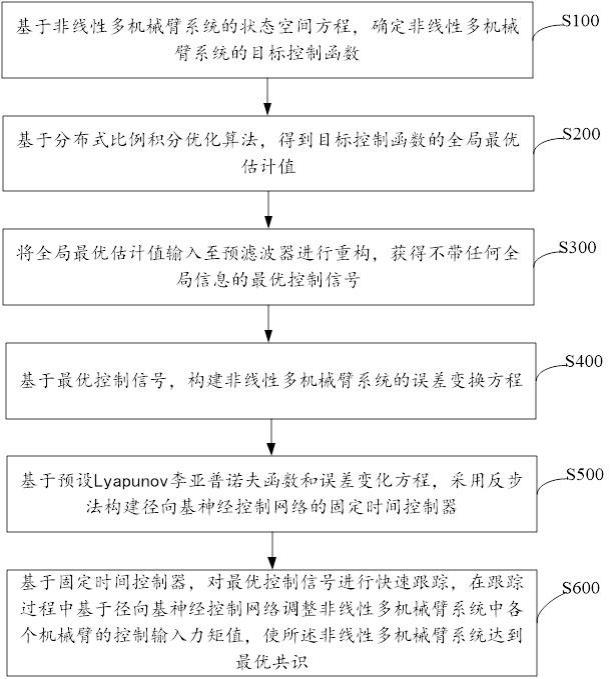
6、基于所述非线性多机械臂系统的状态空间方程,确定所述非线性多机械臂系统的目标控制函数;其中,所述状态空间方程包括未知非线性项;
7、基于分布式比例积分优化算法,得到所述目标控制函数的全局最优估计值;
8、将所述全局最优估计值输入至预滤波器进行重构,获得不带任何全局信息的最优控制信号;
9、基于所述最优控制信号,构建所述非线性多机械臂系统的误差变换方程;
10、基于预设lyapunov李亚普诺夫函数和所述误差变化方程,采用反步法构建径向基神经控制网络的固定时间控制器;
11、基于所述固定时间控制器,对所述最优控制信号进行快速跟踪,在跟踪过程中基于所述径向基神经控制网络调整所述非线性多机械臂系统中各个机械臂的控制输入力矩值,使所述非线性多机械臂系统达到最优共识。
12、在本技术可能的一实施例中,所述误差变换方程包括跟踪误差变换方程和误差面变换方程,所述固定时间控制器包括固定时间子虚拟控制器和固定时间实际控制器;
13、所述基于预设lyapunov李亚普诺夫函数和所述误差变化方程,采用反步法构建径向基神经控制网络的固定时间控制器,包括:
14、基于第一预设lyapunov李亚普诺夫函数和所述跟踪误差变换方程,生成固定时间子虚拟控制器和对应的第一神经网络更新律;
15、基于第二预设lyapunov李亚普诺夫函数和所述误差面变换方程,生成固定时间实际控制器和对应的第二神经网络更新律。
16、在本技术可能的一实施例中,所述基于所述非线性多机械臂系统的状态空间方程,确定所述非线性多机械臂系统的目标控制函数,包括:
17、构建所述非线性多机械臂系统中第i个机械臂的动力学方程;其中,所述动力学方程为:;
18、将所述动力学方程转换为所述状态空间方程;其中,所述状态空间方程为:
19、;
20、基于所述状态空间方程,确定所述非线性多机械臂系统的目标控制函数;其中,所述目标控制函数为:
21、;
22、定义全局目标函数且r为实数域,则所述目标控制函数化简为:
23、;
24、所述目标控制函数转换为寻找最优的使得每个机械臂都满足;
25、其中,为所述第i个机械臂中机械手关节的角位置,为所述第i个机械臂中机械手关节的角速度,为所述第i个机械臂中机械手关节的角加速度,为所述第i个机械臂的对称正定转动惯量,为所述第i个机械臂向心力,为所述第i个机械臂的重力力矩,为所述第i个机械臂的控制输入力矩,,,为输出状态,,为所述第i个机械臂的局部目标函数。
26、在本技术可能的一实施例中,所述基于分布式比例积分优化算法,得到所述目标控制函数的全局最优估计值,包括:
27、根据所述非线性多机械臂系统中各个机械臂之间的通讯关系,生成所述非线性多机械臂系统的通讯拓扑结构;其中,所述通讯拓扑结构表示为;为顶点集,表示为;为边集,表示为;为邻接矩阵,表示为;
28、在所述通讯拓扑结构中,n个机械臂中的第i个机械臂能够接受到第k个机械臂的信息时,表示为,第i个机械臂的邻居集表示为;其中,若,则相应的>0,若不成立,则=0;根据的具体取值,得到,若,则所述通讯拓扑结构为无向拓扑;
29、基于分布式比例积分优化算法和所述通讯拓扑结构,构建所述非线性多机械臂系统的虚拟系统模型;
30、基于所述虚拟系统模型,得到所述目标控制函数的全局最优估计值;
31、其中,所述虚拟系统模型为:
32、;
33、;
34、其中,和均为控制参数,为所述全局最优估计值,为所述虚拟系统的状态。
35、在本技术可能的一实施例中,所述预滤波器为:
36、;
37、其中,为所述最优控制信号,为所述最优控制信号的最高阶导数的阶数,为正常数,且满足:构成赫尔维兹多项式。
38、在本技术可能的一实施例中,所述跟踪误差变换方程为:;其中,所述为跟踪误差,所述=;
39、所述误差面变换方程为:;其中,为所述误差面,为固定时间子虚拟控制器。
40、在本技术可能的一实施例中,所述基于所述非线性多机械臂系统的状态空间方程,确定所述非线性多机械臂系统的目标控制函数之前,所述方法还包括:
41、利用所述径向基神经控制网络对所述未知非线性项逼近,获得所述未知非线性项;所述未知非线性项为:
42、;
43、;
44、其中,和均为所述未知非线性项,所述和均为理想权重,和均为基函数,和均为逼近误差,满足和,和为任意小的正常数,为固定时间子虚拟控制器的导数。
45、在本技术可能的一实施例中,所述第一预设lyapunov李亚普诺夫函数为:;
46、所述固定时间子虚拟控制器为:
47、,其中,
48、;
49、第一神经网络更新律为:
50、;其中,,,,,,均为第i个机械臂的设计参数;为理想权重的估计值;
51、所述第二预设lyapunov李亚普诺夫函数为:;
52、所述固定时间实际控制器为:
53、,其中,
54、;
55、第二神经网络更新律为:
56、;其中,,,,,,均为第i个机械臂的设计参数;为理想权重的估计值。
57、第二方面,本技术还提供了一种非线性多机械臂系统的分布式优化控制设备,包括:处理器,存储器以及存储在所述存储器中的非线性多机械臂系统的分布式优化控制程序,所述非线性多机械臂系统的分布式优化控制程序被所述处理器运行时实现如上所述非线性多机械臂系统的分布式优化控制方法的步骤。
58、第三方面,本技术还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有非线性多机械臂系统的分布式优化控制程序,所述非线性多机械臂系统的分布式优化控制程序被处理器执行时实现如上所述的非线性多机械臂系统的分布式优化控制方法。
59、本技术实施例提出的一种非线性多机械臂系统的分布式优化控制方法,所述方法包括:基于所述非线性多机械臂系统的状态空间方程,确定所述非线性多机械臂系统的目标控制函数;其中,所述状态空间方程包括未知非线性项;基于分布式比例积分优化算法,得到所述目标控制函数的全局最优估计值;将所述全局最优估计值输入至预滤波器进行重构,获得不带任何全局信息的最优控制信号;基于所述最优控制信号,构建所述非线性多机械臂系统的误差变换方程;基于预设lyapunov李亚普诺夫函数和所述误差变化方程,采用反步法构建径向基神经控制网络的固定时间控制器;基于所述固定时间控制器,对所述最优控制信号进行快速跟踪,在跟踪过程中基于所述径向基神经控制网络调整所述非线性多机械臂系统中各个机械臂的控制输入力矩值,使所述非线性多机械臂系统达到最优共识。
60、本技术中,考虑了带有未知非线性的多机械臂系统的分布式优化控制问题,通过预滤波器巧妙地将分布式优化问题转换为一致最优控制问题,且本技术采用固定时间控制器,从而基于固定时间收敛理论方法,提供了一种固定时间分布式优化方法,能够给出较为准确的优化时间估计值的一个上界,该上界与系统初始状态无关,由此,本技术实现了系统的与初始状态无关的快速收敛。
技术实现思路
- 还没有人留言评论。精彩留言会获得点赞!