一种基于视觉识别的机械手的制作方法
本发明涉及机械手技术,具体说,涉及一种基于视觉识别的机械手。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点,而安装了视觉识别系统的机械手,能够识别出不同的标的物和其具体位置,再根据这一点将它们进行有规律的摆放。
2、如中国专利申请号为cn202210366908.9,公开日期为 2022.05.06,该发明公开了一种视觉识别软件开发用夹持机械手,属于机器人技术领域,包括旋转底座,所述旋转底座的上表面活动安装有支撑臂,所述支撑臂的另一端设置有连接组件;该发明中,通过设置有连接组件,启动驱动电机,会带动螺纹杆进行转动,从而使移动板带动移动杆进行移动,进而使固定支架发生位移,电动伸缩杆使升降块向下移动,在升降块向下移动时齿条会带动齿轮进行转动,从而使双向螺纹杆发生转动,因此会通过螺纹使活动板进行移动,从而带动夹持组件进行相向运动将标的物进行夹持。
3、上述方案在进行夹持过程中采用双向螺杆带动移动板进行相向运动,使得移动板一端的夹持组件对标的物进行夹持,其夹持力完全依靠丝杆对移动板提供的轴向力,导致螺杆在长期使用过程中磨损过大。
技术实现思路
1、本发明的目的是提供一种基于视觉识别的机械手,以解决现有技术中的上述不足之处。
2、为了实现上述目的,本发明提供如下技术方案:
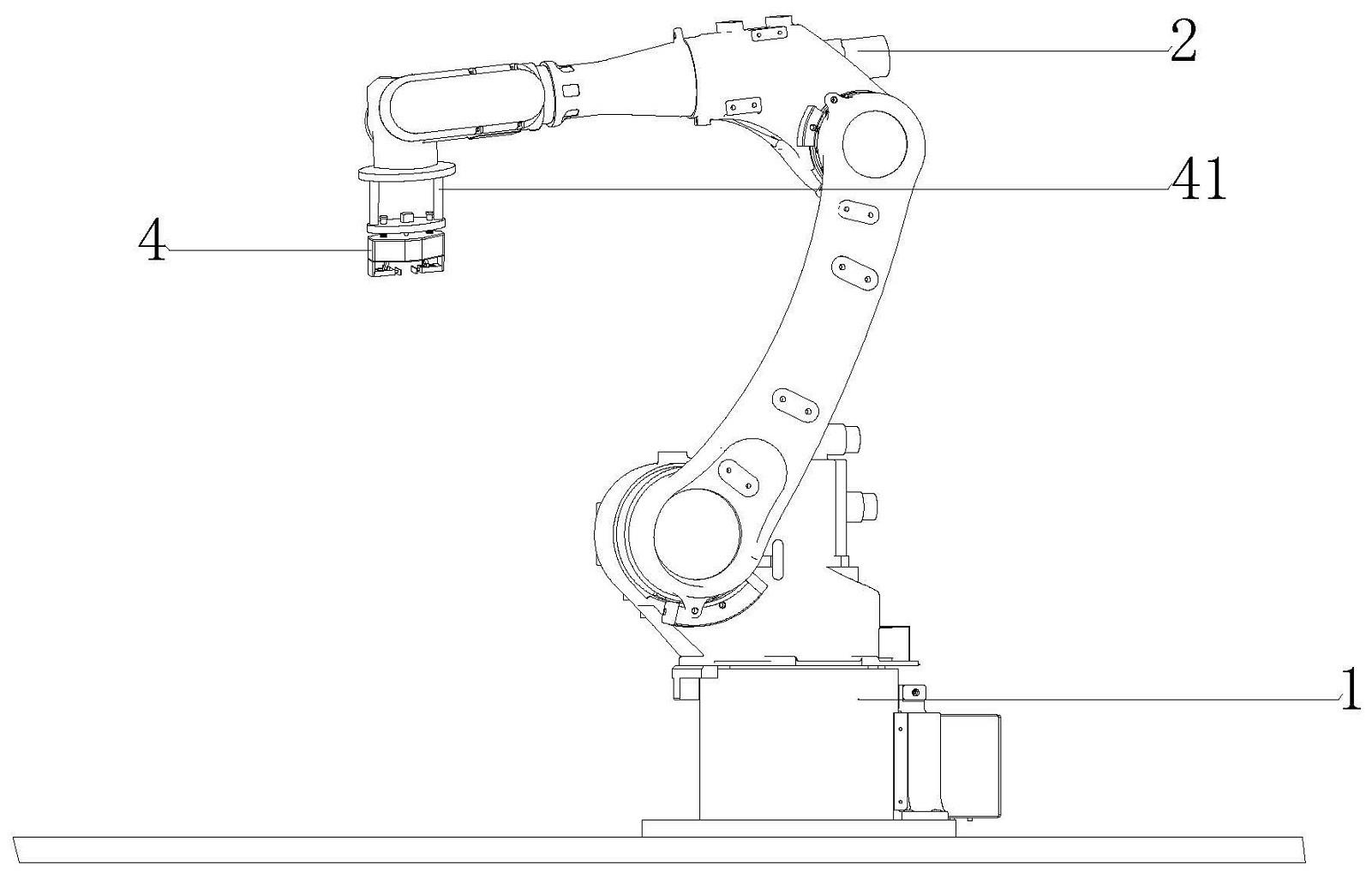
3、一种基于视觉识别的机械手,包括旋转底座,所述旋转底座上活动连接有支撑臂,所述支撑臂上设有驱动件,其特征在于,
4、还包括夹持机构,所述夹持机构活动连接在所述支撑臂上且在所述驱动件的作用下能够竖向往复运动,所述夹持机构内设置有一对杠杆和一对直线运动的夹持块,所述杠杆阻力臂的一端用于推动夹持块进行水平运动,两个所述杠杆的两个动力臂之间设有在水平方向相对运动且能在竖直方向运动的推动组件,所述推动组件用于对两个所述杠杆的动力臂进行推动和支撑。
5、上述的基于视觉识别的机械手,所述夹持机构表面固定有滑杆,所述滑杆滑动贯穿在所述支撑臂上,所述滑杆上套有第一弹簧,所述第一弹簧一端固定在所述夹持机构表面另一端固定在所述支撑臂上,所述第一弹簧用于将夹持机构与底座进行连接起到固定作用且能够在夹持机构运动时产生反推力。
6、上述的基于视觉识别的机械手,所述夹持机构表面设有支撑座,所述支撑座内部开设有通槽和贯穿孔,所述通槽和所述贯穿孔连通,所述夹持块一端滑动插接在所述贯穿孔内并伸入所述通槽内,所述杠杆阻力臂的一端也伸入所述通槽内并抵在所述夹持块上。
7、上述的基于视觉识别的机械手,所述推动组件包括移动座、双向丝杆、推动块和电动推杆,所述移动座设有两个且对称滑动连接在所述夹持机构两侧的内壁上,所述双向丝杆两端转动连接在所述移动座表面,所述推动块也设有两个,两个所述推动块对称螺纹套接在所述双向丝杆上,所述双向丝杆上还套有连接套,所述连接套设置在两个所述推动块之间,所述电动推杆固定在所述支撑臂上,所述电动推杆输出端固定在所述连接套上用于拉动连接套在竖直方向移动从而使推动块向上移动并向两侧挤压杠杆产生推动力。
8、上述的基于视觉识别的机械手,所述杠杆动力臂一端开设有限位槽,所述限位槽与所述双向丝杆之间留有间隙,使得杠杆能够在双向丝杆两侧运动从而被双向丝杆上移动的推动块推动并且增大推动块与杠杆的接触面积提高推动力。
9、上述的基于视觉识别的机械手,所述推动块一端固定有润滑组件,所述润滑组件包括润滑套、存储筒和活塞杆,所述润滑套固定在所述推动块一端且内壁与所述双向丝杆留有间隙,所述润滑套内壁设有亲水软垫层,所述存储筒设置在所述润滑套上下两侧,两个所述存储筒通过软管连通,两个所述存储筒与所述润滑筒连通,所述活塞杆滑动连接在润滑套下方的一个所述存储筒内,所述活塞杆上套有复位弹簧,所述活塞杆在润滑套下方的所述存储筒内移动时能够将下方的所述存储筒内的润滑剂挤入润滑套上方的一个所述存储筒内。
10、上述的基于视觉识别的机械手,所述夹持块上套有第二弹簧,所述第二弹簧一端固定在所述夹持块表面另一端固定在所述支撑座表面。
11、上述的基于视觉识别的机械手,所述夹持块靠近所述杠杆的一端上设有滚轮,所述滚轮处在所述支撑座内部的空腔内且与所述空腔之间有间隙,所述滚轮用于减小夹持块与所述杠杆之间的摩擦力。
12、上述的基于视觉识别的机械手,所述夹持机构表面开设有通风窗。
13、上述的基于视觉识别的机械手,所述夹持机构表面安装有检修板。
14、本发明的有益效果在于:通过将夹持块设置在杠杆的阻力臂端,来放大在杠杆动力臂端的推动组件的推动力来减小推动组件受到的压力,且推动组件在工作过程中有向竖直方向运动的趋势给杠杆另外提供一个水平方向的力来增大杠杆阻力臂端的夹持块夹持力,夹持力度大且减小了推动组件的压力和磨损,使用寿命长。
技术特征:
1.一种基于视觉识别的机械手,包括旋转底座,所述旋转底座上活动连接有支撑臂,其特征在于,
2.根据权利要求1所述的一种基于视觉识别的机械手,其特征在于,所述夹持机构表面固定有滑杆,所述滑杆滑动贯穿在所述支撑臂上,所述滑杆上套有第一弹簧,所述第一弹簧一端固定在所述夹持机构表面另一端固定在所述支撑臂上,所述第一弹簧用于将夹持机构与支撑臂进行连接起到固定作用且能够在夹持机构运动时产生一个相反的运动阻力。
3.根据权利要求1所述的一种基于视觉识别的机械手,其特征在于,所述推动组件包括移动座、双向丝杆、推动块和电动推杆,所述移动座设有两个且对称滑动连接在所述夹持机构两侧的内壁上,所述双向丝杆两端转动连接在所述移动座表面,所述推动块也设有两个,两个所述推动块对称螺纹套接在所述双向丝杆上,所述双向丝杆上还套有连接套,所述连接套设置在两个所述推动块之间,所述电动推杆固定在所述支撑臂上,所述电动推杆输出端固定在所述连接套上用于拉动连接套在竖直方向移动从而使推动块向上移动并向两侧挤压杠杆产生推动力。
4.根据权利要求1所述的一种基于视觉识别的机械手,其特征在于,所述推动组件包括移动座、双向丝杆、推动块和电动推杆,所述移动座设有两个且对称滑动连接在所述夹持机构两侧的内壁上,所述双向丝杆两端转动连接在所述移动座表面,所述推动块也设有两个,两个所述推动块对称螺纹套接在所述双向丝杆上,所述双向丝杆上还套有连接套,所述连接套设置在两个所述推动块之间,所述电动推杆固定在所述支撑臂上,所述电动推杆输出端固定在所述连接套上用于拉动连接套在竖直方向移动从而使推动块向上移动并向两侧挤压杠杆产生推动力。
5.根据权利要求4所述的一种基于视觉识别的机械手,其特征在于,所述杠杆的动力臂一端开设有限位槽,所述限位槽与所述双向丝杆之间留有间隙,使得杠杆能够在双向丝杆两侧运动从而被双向丝杆上移动的推动块推动并且增大推动块与杠杆的接触面积提高推动力。
6.根据权利要求5所述的一种基于视觉识别的机械手,其特征在于,所述推动块一端固定有润滑组件,所述润滑组件包括润滑套、存储筒和活塞杆,所述润滑套固定在所述推动块一端且内壁与所述双向丝杆留有间隙,所述润滑套内壁设有亲水软垫层,所述存储筒设置在所述润滑套上下两侧,两个所述存储筒通过软管连通,两个所述存储筒与所述润滑筒连通,所述活塞杆滑动连接在润滑套下方的一个所述存储筒内,所述活塞杆上套有复位弹簧,所述活塞杆在润滑套下方的所述存储筒内移动时能够将下方的所述存储筒内的润滑剂挤入润滑套上方的一个所述存储筒内。
7.根据权利要求1所述的一种基于视觉识别的机械手,其特征在于,所述夹持块上套有第二弹簧,所述第二弹簧一端固定在所述夹持块表面另一端固定在所述支撑座表面。
8.根据权利要求1所述的一种基于视觉识别的机械手,其特征在于,所述夹持块靠近所述杠杆的一端上设有滚轮,所述滚轮处在所述支撑座内部的空腔内且与所述空腔之间有间隙,所述滚轮用于减小夹持块与所述杠杆之间的摩擦力。
9.根据权利要求1所述的一种基于视觉识别的机械手,其特征在于,所述夹持机构表面开设有通风窗。
10.根据权利要求1所述的一种基于视觉识别的机械手,其特征在于,所述夹持机构表面安装有检修板。
技术总结
本发明公开了一种基于视觉识别的机械手,包括旋转底座,所述旋转底座上活动连接有支撑臂,还包括夹持机构,所述夹持机构活动连接在所述支撑臂上动,所述夹持机构内设置有一对杠杆和一对直线运动的夹持块,所述杠杆阻力臂的一端用于推动夹持块进行水平运动,所述推动组件用于对两个所述杠杆的动力臂进行推动和支撑,本实发明提供的一种基于视觉识别的机械手,通过将夹持块设置在杠杆的阻力臂端,来放大在杠杆动力臂端的推动组件的推动力来减小推动组件受到的压力,且推动组件在工作过程中有向竖直方向运动的趋势给杠杆另外提供一个水平方向的力来增大杠杆阻力臂端的夹持块夹持力,夹持力度大且减小了推动组件的压力和磨损,使用寿命长。
技术研发人员:岳静,骆徐程,王世鹏,詹超,彭诺蒙,成炜兵,魏庭宇
受保护的技术使用者:航天晨光股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!