一种内管道可组合可变径清理机器人
本发明涉及清洁,尤其涉及一种内管道可组合可变径清理机器人。
背景技术:
1、随着城市的发展,管道的使用也越来越多,越来越普及,但是管道经常需要做的就是对内壁进行检测,同时在管道内还有有一些垃圾杂质,人工检测清理比较麻烦,因此一般都是使用管道机器人对管道内部进行巡检清理。
2、现目前,管道机器人的设计结构多数是针对于单一内径管道的巡检,无法适用于不同内径的管道。
技术实现思路
1、本发明的目的在于提供一种内管道可组合可变径清理机器人,可以方便拆分组合并适用于不同内径的管道清理。
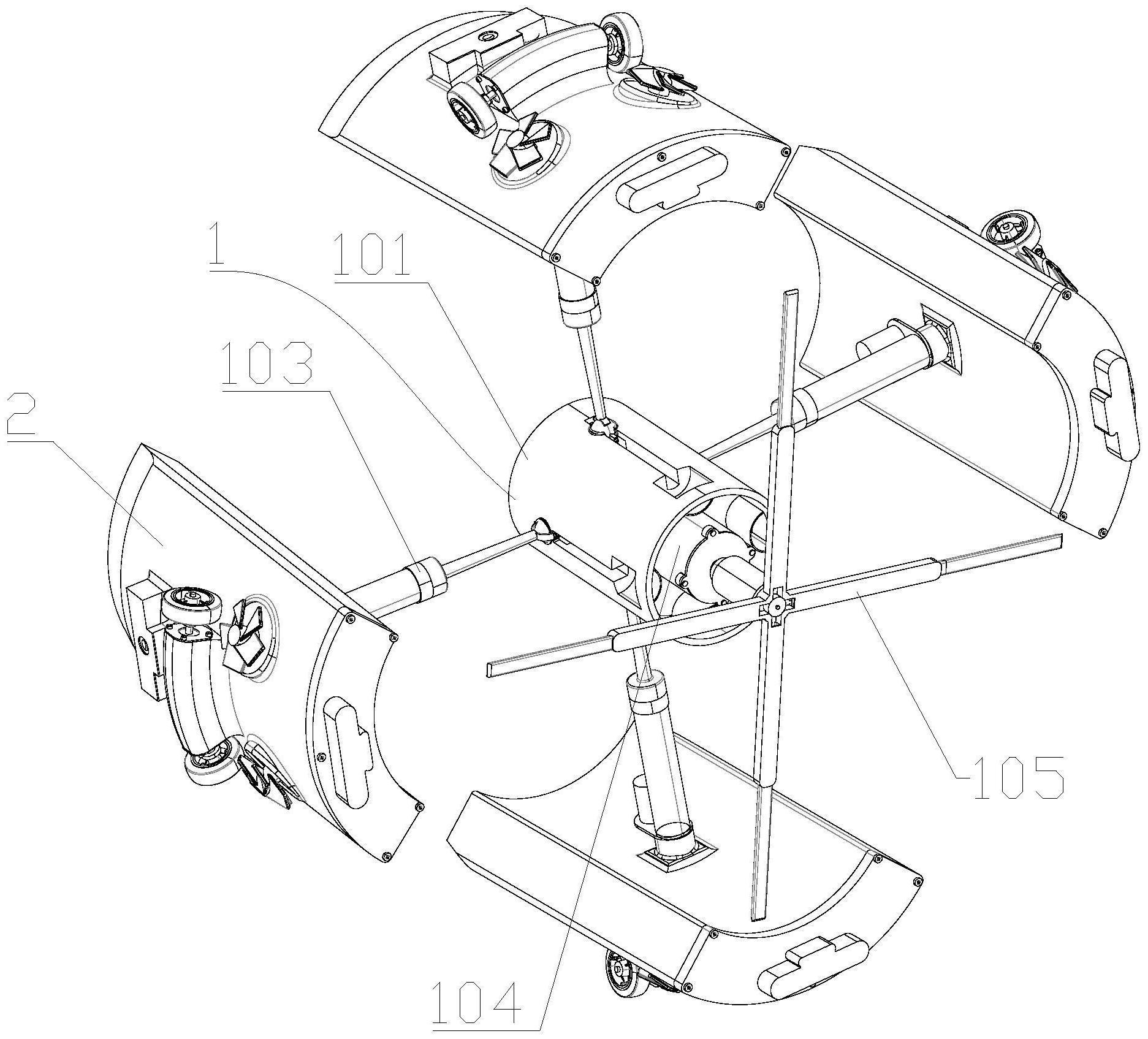
2、为实现上述目的,本发明提供了一种内管道可组合可变径清理机器人,包括清理组件和四个巡检组件;
3、所述清理组件包括清理主体、驱动机构、四个变径机构、第一电机和十字清理机构;所述驱动机构设置在所述清理主体内部;四个所述变径机构分别设置在所述清理主体侧边;四个所述巡检组件分别设置在四个所述变径机构一侧;所述第一电机设置在所述清理主体内侧;所述十字清理机构设置在所述第一电机的输出端;
4、所述变径机构包括齿轮球面副、电磁铁、电动伸缩杆定杆、电动伸缩杆动杆、内置磁铁和超级磁铁;所述齿轮球面副转动设置在所述清理主体上;所述电磁铁设置在所述齿轮球面副远离所述清理主体一侧;所述电动伸缩杆定杆与所述巡检组件螺纹连接,并位于所述巡检组件靠近所述齿轮球面副一侧;所述电动伸缩杆动杆滑动设置在所述电动伸缩杆定杆内侧;所述内置磁铁设置在所述电动伸缩杆动杆靠近所述电磁铁一侧;所述超级磁铁设置在所述巡检组件靠近所述电动伸缩杆定杆一侧。
5、其中,所述驱动机构包括两个第二电机、两个连接轴和两个中心齿轮;两个所述第二电机分别设置在所述清理主体内部;两个所述连接轴分别设置在两个所述第二电机的输出端;两个所述中心齿轮分别与两个所述连接轴固定连接,并分别位于所述清理主体内部;两个所述中心齿轮呈空间十字交错布置,每一所述中心齿轮分别与两个对称的所述齿轮球面副啮合。
6、其中,所述驱动机构还包括电机驱动板、通讯硬件板和两个第一电池;所述电机驱动板设置在所述清理主体内部;所述通讯硬件板设置在所述清理主体内部;两个所述第一电池分别设置在所述清理主体内部。
7、其中,所述十字清理机构包括十字安装件、四个惯性滑轨和四个韧性圆柱销;所述十字安装件设置在所述第一电机的输出端;四个所述惯性滑轨分别滑动设置在所述十字安装件上;每一所述惯性滑轨与所述十字安装件之间均设置一个所述韧性圆柱销。
8、其中,所述十字清理机构还包括橡胶垫;所述橡胶垫与所述十字安装件固定连接,并位于所述十字安装件内侧。
9、其中,所述巡检组件包括巡检主体、两个第三电机、两个驱动轮、透明壳、两个补光灯、夜视摄像头、透明盖和深度相机;所述巡检主体与所述电动伸缩杆定杆螺纹连接,并位于所述电动伸缩杆定杆一侧;两个所述第三电机分别设置在所述巡检主体内部;两个所述驱动轮分别设置在两个所述第三电机的输出端;所述透明壳与所述巡检主体固定连接,并位于所述巡检主体一侧;两个所述补光灯分别设置在所述透明壳内部;所述夜视摄像头设置在所述透明壳内部;所述透明盖与所述巡检主体固定连接,并位于所述是巡检主体一侧;所述深度相机设置在所述透明盖内部。
10、其中,所述巡检组件还包括两个除尘风扇;两个所述除尘风扇分别设置在所述巡检主体一侧。
11、其中,所述巡检组件还包括两个第二电池、超磁安装板和树莓派;两个所述第二电池分别设置在所述巡检主体内部;所述超磁安装板设置在所述巡检主体内部;所述树莓派设置在所述超磁安装板上。
12、本发明的一种内管道可组合可变径清理机器人,四个所述巡检组件可以沿着管道内壁移动,支撑着所述清理组件移动,所述驱动机构可以驱动四个所述变径机构沿着所述清理主体轴向摆动,四个所述变径机构带动巡检组件移动,实现机器人整体的外形变化;所述第一电机用于驱动所述十字清理机构转动,对管道内部进行清理;所述齿轮球面副可以被所述驱动机构驱动,沿着所述清理主体轴向摆动;所述齿轮球面副远离所述清理主体的一端有凹槽,内部设置所述电磁铁,所述电动伸缩杆动杆的端部设置有所述内置磁铁,用于与所述电磁铁相互吸引,方便将所述电动伸缩杆动杆和所述齿轮球面副组合连接起来,所述电动伸缩杆动杆可以在所述电动伸缩杆定杆内部伸缩,从而实现所述巡检组件的直线伸缩;所述驱动机构可以驱动所述齿轮球面副沿着所述清理主体轴向摆动,所述电动伸缩杆定杆和所述电动伸缩杆动杆可以实现所述巡检组件的直线伸缩,一起实现机器人整体的外形尺寸变化,并且所述电磁铁和所述内置磁铁的设置,方便了组合安装拆卸,从而可以方便拆分组合并适用于不同内径的管道清理。
技术特征:
1.一种内管道可组合可变径清理机器人,其特征在于,
2.如权利要求1所述的一种内管道可组合可变径清理机器人,其特征在于,
3.如权利要求2所述的一种内管道可组合可变径清理机器人,其特征在于,
4.如权利要求3所述的一种内管道可组合可变径清理机器人,其特征在于,
5.如权利要求4所述的一种内管道可组合可变径清理机器人,其特征在于,
6.如权利要求5所述的一种内管道可组合可变径清理机器人,其特征在于,
7.如权利要求6所述的一种内管道可组合可变径清理机器人,其特征在于,
8.如权利要求7所述的一种内管道可组合可变径清理机器人,其特征在于,
技术总结
本发明涉及清洁技术领域,具体涉及一种内管道可组合可变径清理机器人,包括清理组件和四个巡检组件;清理组件包括清理主体、驱动机构、四个变径机构、第一电机和十字清理机构;变径机构包括齿轮球面副、电磁铁、电动伸缩杆定杆、电动伸缩杆动杆、内置磁铁和超级磁铁;四个巡检组件可以在管道内部移动,第一电机驱动十字清理机构转动,对管道内部进行清理;驱动机构可以驱动齿轮球面副沿着清理主体轴向摆动,电动伸缩杆定杆和电动伸缩杆动杆可以实现巡检组件的直线伸缩,一起实现机器人整体的外形尺寸变化,并且电磁铁和内置磁铁的设置,方便了组合,从而可以方便拆分组合并适用于不同内径的管道清理。
技术研发人员:黎泽伦,成建渝,周传德,吕中亮,殷雷,赵雪
受保护的技术使用者:重庆科技学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!