光伏板的清扫方法、系统、电子设备和存储介质与流程
本申请属于光伏板清扫,涉及一种光伏板的清扫方法、系统、电子设备和存储介质。
背景技术:
1、光伏发电也称为太阳能发电,是一种现代化的清洁能源技术。随着工业和科技的进步,这一技术经历了漫长而曲折的发展历程,如今被广泛应用于交通、建筑、工业、农业、商业等各种领域。伴随着光伏产业的发展,光伏电站在运营管理中的各种问题也开始突显,户外特性的光伏板表面聚集灰尘,成为影响发电效率的重要因素之一。
2、现有的光伏板清扫车技术中,移动式清扫车都是通过边行走边清扫的模式,这种在道路情况不是很平坦的情况,车辆在行走中容易因为路面突起或者路面凹陷导致车身的高度、航向或者横向位置发生变化,从而导致无法清扫到光伏板表面,或者清扫装置撞到光伏板从而损坏光伏板表面。路面不平坦也会导致每一块光伏板的铺设会有一定的角度偏差,移动式清扫车在清扫过程中也需要不停适应每一块光伏板的角度变化。对于倾角可调的光伏板,光伏板的角度会随着太阳的照射程度调整倾角,会导致光伏板与光伏板清扫车的清洗方向存在夹角,从而对光伏板的姿态检测具有一定的需求。
3、轮式/履带式的移动式光伏板清扫车主要通过深度相机或者红外相机来判断光伏板的姿态进而清扫光伏板。深度相机或者红外相机成本较高,且只能粗略地定位光伏板的位置和倾斜角,精度较差。
技术实现思路
1、为了对披露的实施例的一些方面有基本的理解,下面给出了简单的概括。所述概括不是泛泛评述,也不是要确定关键/重要组成元素或描绘这些实施例的保护范围,而是作为后面的详细说明的序言。
2、为了解决相关技术中存在的问题,本公开实施例提供了光伏板的清扫方法、系统、电子设备和存储介质,用以解决现有技术中光伏板的清扫过程中识别光伏板的位置和倾斜角精度不足的问题。
3、在一些实施例中,提供了一种光伏板的清扫方法,应用于光伏板的清扫系统,所述系统包括清扫车和计算终端,清扫车包括单目相机、机械臂和连接在机械臂上的清洁刷,所述方法包括:
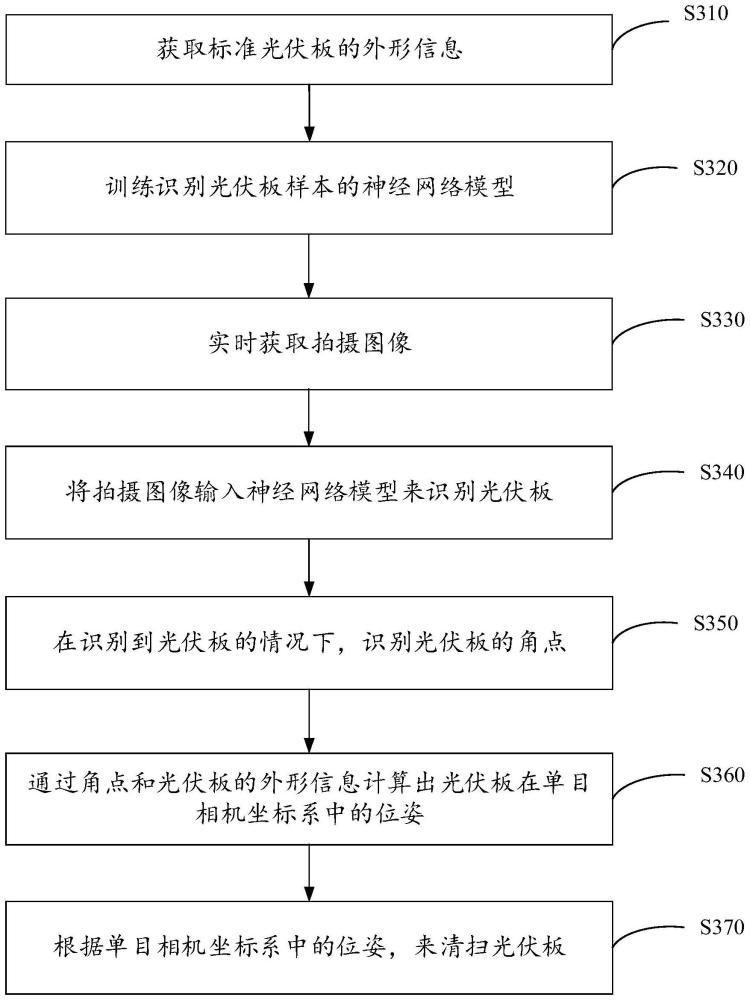
4、获取标准光伏板的外形信息;
5、训练识别光伏板样本的神经网络模型;
6、实时获取拍摄图像;
7、将拍摄图像输入神经网络模型来识别光伏板;
8、在识别到光伏板的情况下,识别光伏板角点;
9、通过角点和光伏板的外形信息出光伏板在单目相机坐标系中的位姿;
10、根据单目相机坐标系中的位姿,来清扫光伏板。
11、优选地,识别光伏板角点,包括:
12、使用mtcnn算法的三层级联网络进行光伏板角点的提取,包括:
13、p-net提取出所有光伏板的特征点;
14、r-net去除错误检测的非光伏板的框和点;
15、o-net输出包括多个边界框以及要获取的光伏板角点位置,
16、优选地,识别光伏板角点,还包括:调整三层级联网络的损失函数,以使检测的误差变小,使用交叉熵代价函数,对于框回归和关键点定位,使用l2损失,将三部分的损失各自乘以自身的权重累加起来,形成最后的总损失;
17、其中,总损失的计算公式如下:
18、
19、其中,α是任务的权重;β是样本类型,范围是{0,1};l为损失函数本身;
20、
21、
22、
23、其中,为回归框的损失函数,为关键点损失函数。
24、优选地,通过角点和光伏板的外形信息出光伏板在单目相机坐标系中的位姿,包括:
25、基于pnp算法中的p3p实现方法,来计算单目相机坐标系中的位姿,包括:
26、根据任意三个角点位置和光伏板的尺寸信息,来获取对应的三个2d点;
27、基于单目相机内参,计算出单目相机归一化坐标系下的三个三维空间坐标点;
28、使用相似三角形或者四元数方法求解出单目相机坐标系到参考坐标系之间的旋转矩阵,第四个角点是冗余点,来用于计算验证结果的正确性;
29、将四个角点连接,形成目标光伏板在单目相机坐标系下位姿矩阵matrix-a。
30、优选地,根据单目相机坐标系中的位姿,来清扫光伏板,包括:
31、获取单目相机坐标系与机械臂坐标系下的转换关系;
32、将matrix-a转化成目标光伏板在机械臂坐标系下的位姿矩阵matrix-b;
33、通过matrix-b来计算清洁刷与目标光伏板的斜率和相对位置;
34、将matrix-a转化成目标光伏板在机械臂坐标系下的位姿矩阵matrix-b;
35、将matrix-b转化成目标光伏板在清扫车坐标系下的位姿矩阵matrix-c;
36、通过matrix-c来计算清扫车与目标光伏板相对于二维地面的相对位置;
37、基于清扫车与目标光伏板相对于二维地面的相对位置、清洁刷与目标光伏板的斜率和相对位置,来清扫光伏板。
38、优选地,基于清扫车与目标光伏板相对于二维地面的相对位置、清洁刷与目标光伏板的斜率和相对位置,来清扫光伏板,包括:
39、基于清扫车与目标光伏板相对于二维地面的相对位置、调整清扫车的位置;
40、基于清洁刷与目标光伏板的相对位置,通过机械臂调整清洁刷与目标光伏板的位置;
41、基于清洁刷与目标光伏板的斜率,机械臂调整清洁刷的倾斜角度;
42、清扫光伏板。
43、优选地,所述方法,还包括:
44、在清扫的过程中,记录每一块光伏板对应的位置和倾斜角度,直至完成清扫光伏板组的任务;
45、在执行下一次清扫光伏板组的任务,调取每一块光伏板对应的位置和倾斜角度清扫光伏板。
46、在一些实施例中,公开了一种光伏板的清扫系统,其特征在于,包括清扫车和计算终端,清扫车包括单目相机、机械臂和连接在机械臂上的清洁刷,计算终端被设置在清扫车或者后台中心,所述清扫系统执行如上述的光伏板的清扫方法。
47、在一些实施例中,公开了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时,执行如上述的光伏板的清扫方法。
48、在一些实施例中,公开了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行如上述的光伏板的清扫方法。
49、本公开实施例提供的一种光伏板的清扫方法、系统、电子设备和存储介质,可以实现以下技术效果:
50、本公开实施例通过深度学习算法下的单目相机,识别到的光伏板图像中的角点和光伏板的外形信息,识别出对应的光伏板,从而提高了识别光伏板的精度。
51、以上的总体描述和下文中的描述仅是示例性和解释性的,不用于限制本申请。
技术特征:
1.一种光伏板的清扫方法,其特征在于,应用于光伏板的清扫系统,所述系统包括清扫车和计算终端,清扫车包括单目相机、机械臂和连接在机械臂上的清洁刷,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,识别光伏板角点,包括:
3.根据权利要求2所述的方法,其特征在于,识别光伏板角点,还包括:调整三层级联网络的损失函数,以使检测的误差变小,使用交叉熵代价函数,对于框回归和关键点定位,使用l2损失,将三部分的损失各自乘以自身的权重累加起来,形成最后的总损失;
4.根据权利要求2所述的方法,其特征在于,通过角点和光伏板的外形信息出光伏板在单目相机坐标系中的位姿,包括:
5.根据权利要求4所述的方法,其特征在于,根据单目相机坐标系中的位姿,来清扫光伏板,包括:
6.根据权利要求5所述的方法,其特征在于,基于清扫车与目标光伏板相对于二维地面的相对位置、清洁刷与目标光伏板的斜率和相对位置,来清扫光伏板,包括:
7.根据权利要求1所述的方法,其特征在于,所述方法,还包括:
8.一种光伏板的清扫系统,其特征在于,包括清扫车和计算终端,清扫车包括单目相机、机械臂和连接在机械臂上的清洁刷,计算终端被设置在清扫车或者后台中心,所述清扫系统执行如权利要求1至7中任一项所述的方法。
9.一种电子设备,其特征在于,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时,实现如权利要求1至7中任一项所述的方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1至7中任一项所述的方法。
技术总结
本发明涉及光伏板清扫技术领域,公开了光伏板的清扫方法、系统、电子设备和存储介质,所述光伏板的清扫系统包括清扫车和计算终端,清扫车包括单目相机、机械臂和连接在机械臂上的清洁刷,所述方法包括:获取标准光伏板的外形信息;训练识别光伏板样本的神经网络模型;实时获取拍摄图像;将拍摄图像输入神经网络模型来识别光伏板;在识别到光伏板的情况下,识别光伏板角点;通过角点和光伏板的外形信息出光伏板在单目相机坐标系中的位姿,来清扫光伏板。本发明通过识别到的光伏板图像中的角点和光伏板的外形信息,识别出对应的光伏板,从而提高了识别光伏板的精度。
技术研发人员:周锐,孟天翔,张泽耿,曹东璞
受保护的技术使用者:深圳慧拓无限科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!