清洁方法、装置、系统及作业机械与流程
本发明涉及机械工程,尤其涉及一种清洁方法、装置、系统及作业机械。
背景技术:
1、作业机械,如挖掘机,挖掘机在泥土地工况中,履带粘连的泥土、沙石等废弃物被带动,甩落并堆积在下车架,且不易清除。若废弃物长时间堆积,且达到一定高度后,将会影响履带、拖链轮的正常运转,进而严重影响作业机械正常运行。
2、因此,如何对作业机械进行简单快速地废弃物清洁是目前业界亟待解决的重要课题。
技术实现思路
1、本发明提供一种清洁方法、装置、系统及作业机械,用以解决现有技术中废弃物堆积,导致作业机械无法正常运行的缺陷,实现简单快速地废弃物清洁,以确保作业机械的正常运行。
2、本发明提供一种清洁方法,应用于作业机械,所述作业机械的目标部件的表面设置有至少一个振动器,所述方法包括:
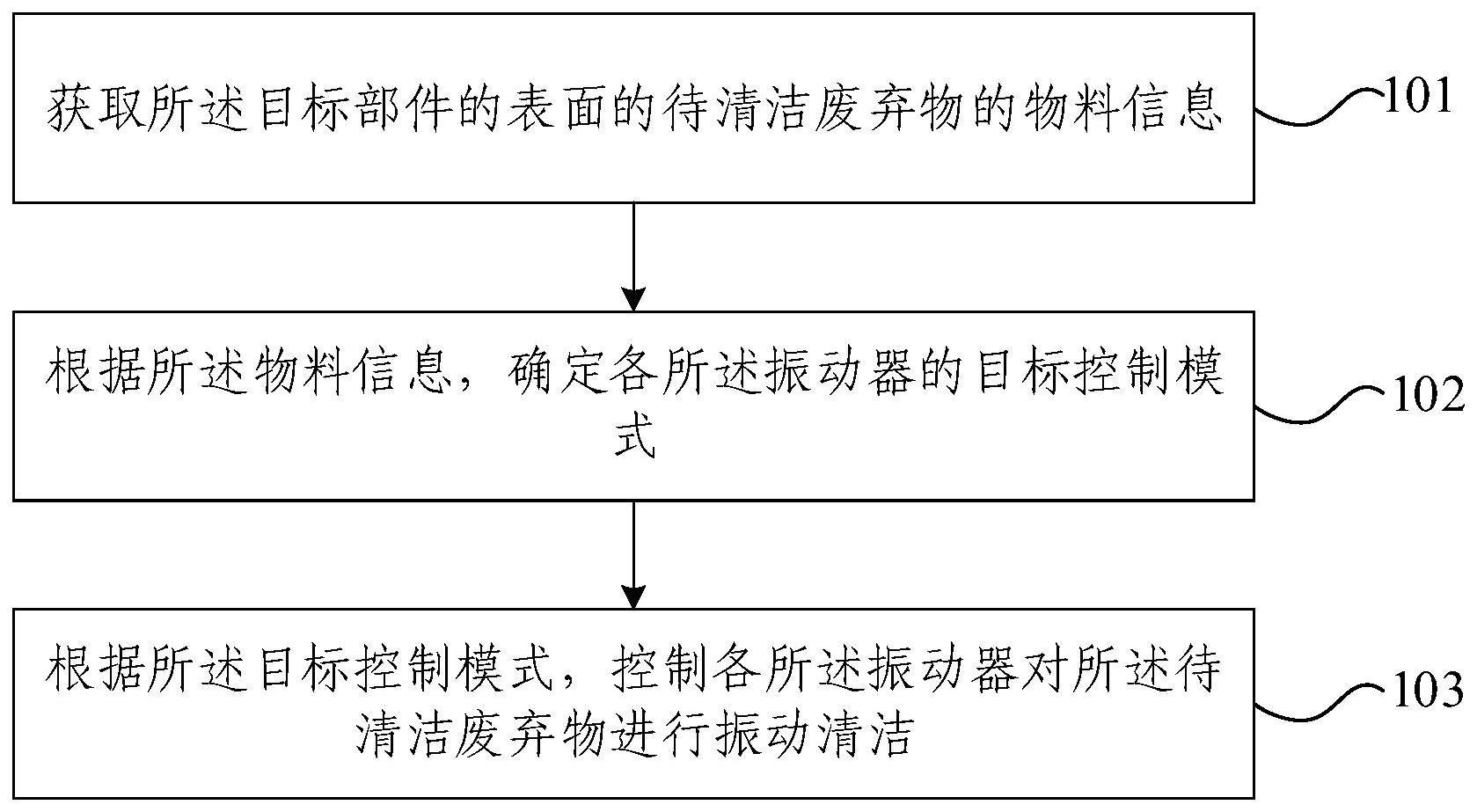
3、获取所述目标部件的表面的待清洁废弃物的物料信息;
4、根据所述物料信息,确定各所述振动器的目标控制模式;
5、根据所述目标控制模式,控制各所述振动器对所述待清洁废弃物进行振动清洁。
6、根据本发明提供的一种清洁方法,所述根据所述物料信息,确定各所述振动器的目标控制模式,包括:
7、根据所述物料信息,确定所述待清洁废弃物中各物料的类型以及各所述物料的尺寸;
8、根据各所述物料的类型以及各所述物料的尺寸,确定所述目标控制模式。
9、根据本发明提供的一种清洁方法,所述根据各所述物料的类型以及各所述物料的尺寸,确定所述目标控制模式,包括:
10、在确定多个所述物料的类型相同,且多个所述物料的尺寸所属的尺寸区间相同的情况下,确定所述目标控制模式为第一控制模式,所述第一控制模式包括按照恒定激振频率进行控制的模式;
11、所述根据所述目标控制模式,控制各所述振动器对所述待清洁废弃物进行振动清洁,包括:
12、在所述第一控制模式下,根据多个所述物料的类型以及所述尺寸区间,确定对应的恒定激振频率;
13、控制各所述振动器按照所述对应的恒定激振频率所匹配的简谐激励电压信号,对所述待清洁废弃物进行振动清洁。
14、根据本发明提供的一种清洁方法,所述根据各所述物料的类型以及各所述物料的尺寸,确定所述目标控制模式,包括:
15、在确定多个所述物料的类型不相同和/或多个所述物料的尺寸所属的尺寸区间不相同的情况下,确定所述目标控制模式为第二控制模式,所述第二控制模式包括按照变频加载方式进行控制的模式;
16、所述根据所述目标控制模式,控制各所述振动器对所述待清洁废弃物进行振动清洁,包括:
17、在所述第二控制模式下,确定所述待清洁废弃物对应的变频加载方式;
18、控制各所述振动器按照所述对应的变频加载方式,对所述待清洁废弃物进行振动清洁。
19、根据本发明提供的一种清洁方法,所述确定所述待清洁废弃物对应的变频加载方式,包括:
20、确定所述对应的变频加载方式为按照多个等差递增的激振频率进行激振频率变频加载的方式;
21、所述控制各所述振动器按照所述对应的变频加载方式,对所述待清洁废弃物进行振动清洁,包括:
22、获取多个等差递增的第一目标激振频率;
23、控制各所述振动器在多个等差递增的所述第一目标激振频率中循环加载各所述第一目标激振频率,对所述待清洁废弃物进行循环振动清洁。
24、根据本发明提供的一种清洁方法,所述确定所述待清洁废弃物对应的变频加载方式,包括:
25、确定所述对应的变频加载方式为按照所述待清洁废弃物的清洁信息进行激振频率变频加载的方式;
26、所述控制各所述振动器按照所述对应的变频加载方式,对所述待清洁废弃物进行振动清洁,包括:
27、根据所述待清洁废弃物的清洁信息,对各所述振动器的激振频率进行更新,得到各所述振动器对应的第二目标激振频率;
28、控制各所述振动器按照所述第二目标激振频率,对所述待清洁废弃物进行振动清洁。
29、根据本发明提供的一种清洁方法,所述确定所述待清洁废弃物对应的变频加载方式,包括:
30、确定所述对应的变频加载方式为按照各所述振动器的分布区域进行激振频率变频加载的方式;
31、所述控制各所述振动器按照所述对应的变频加载方式,对所述待清洁废弃物进行振动清洁,包括:
32、根据所述各所述振动器的分布区域,确定各所述振动器对应的分组;
33、控制各分组内的振动器按照各分组对应的激振频率,对所述待清洁废弃物进行分区域振动清洁;
34、不同分组对应的激振频率所属的频率区间不同。
35、根据本发明提供的一种清洁方法,所述根据所述物料信息,确定各所述振动器的目标控制模式,包括:
36、识别所述作业机械的液压管路中是否存在行走压力信号;
37、在识别到所述液压管路中存在所述行走压力信号的情况下,根据所述物料信息,确定各所述振动器的目标控制模式。
38、本发明还提供一种清洁装置,应用于作业机械,所述作业机械的目标部件的表面设置有至少一个振动器,所述装置包括:
39、获取单元,用于获取所述目标部件的表面的待清洁废弃物的物料信息;
40、确定单元,用于根据所述物料信息,确定各所述振动器的目标控制模式;
41、控制单元,用于根据所述目标控制模式,控制各所述振动器对所述待清洁废弃物进行振动清洁。
42、本发明还提供一种清洁系统,包括控制系统和至少一个振动器;
43、各所述振动器安装在作业机械的目标部件的表面;
44、各所述振动器与所述控制系统电连接;
45、所述控制系统包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一项所述清洁方法。
46、根据本发明提供的一种清洁系统,多个所述振动器按照目标阵列排布在所述目标部件的表面;
47、每一所述振动器包括陶瓷片和金属片;
48、所述陶瓷片固定在所述目标部件的表面,且所述陶瓷片的表面设置有所述金属片。
49、本发明还提供一种作业机械,包括如上述任一项所述清洁系统,以及下车架、拖链轮和履带;
50、所述清洁系统中的振动器安装在所述下车架的表面;
51、所述拖链轮安装在所述下车架的两侧,且与所述履带相连接。
52、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述清洁方法。
53、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述清洁方法。
54、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述清洁方法。
55、本发明提供的清洁方法、装置、系统及作业机械,通过在目标部件的表面设置有至少一个振动器,并根据物料信息确定各振动器的目标控制模式,以基于目标控制模式适应性地控制各振动器对待清洁废弃物进行自动振动清洁,一方面基于振动器即可实现废弃物清洁,使得清洁方式简单便捷,另一方面,可以使得振动器充分接触待清洁废弃物,以对待清洁废弃物进行深入清洁,有效提高清洁质量,由此最大限度地减少废弃物带来的作业机械的磨损和腐蚀,确保作业机械的正常运行。
56、本发明提供的清洁方法、装置、系统及作业机械,还通过针对待清洁废弃物中各物料的类型以及各物料的尺寸,适应性地确定目标控制模式,以基于目标控制模式控制振动器针对不同的不同类型和尺寸的物料进行清洁,不仅使清洁过程更具有效益,减少了处理工艺所需的时间和资源,由此提供更加快速、精确和彻底的清洁效果,而且可以适用不同类型的泥土、石块等物料,能够使得清洁控制的适应范围更广。
57、本发明提供的清洁方法、装置、系统及作业机械,还通过对各振动器施加对应的恒定激振频率的简谐激励电压信号,激发出各振动器的一阶纵振模态,使得各振动器的一阶纵振通过其金属片将振动放大传递至待清洁废弃物,使得待清洁废弃物发生垂直方向的振动,从而挤压待清洁废弃物并使待清洁废弃物破裂,以及抖落待清洁废弃物,由此实现简单快速地废弃物清洁,以确保作业机械的正常运行。
58、本发明提供的清洁方法、装置、系统及作业机械,还通过基于变频加载方式的控制模式,激发出各振动器的变频的一阶纵振模态,使得待清洁废弃物各物料在发生垂直方向的不同振频的振动,从而以不同振频挤压循环待清洁废弃物并使待清洁废弃物破裂,以及抖落待清洁废弃物,实现简单快速进行待清洁废弃物中各种物料的深层次清洁,提高清洁质量,以进一步确保作业机械的正常运行。
- 还没有人留言评论。精彩留言会获得点赞!