一种管道清洗智能机器人的制作方法
本技术涉及管道清洁,特别涉及一种管道清洗智能机器人。
背景技术:
1、管道是用于输送气体、液体或带固体颗粒的流体的装置,通常,流体经鼓风机、压缩机、泵和锅炉等增压后,从管道的高压处流向低压处,也可利用流体自身的压力或重力输送,管道的用途很广泛,主要用在给水、排水、供热、供煤气、长距离输送石油和天然气、农业灌溉、水力工程和各种工业装置,管道再长期使用后,由于运输介质的影响,其内壁会附着大量杂质,因此,需要对其内部进行清洗清洁,管道的清洁通常需要通过管道清洗机器人实现。
2、然而现有的管道清洗机器人其清洁部件无法进行调节,因此,大多数管道清洗机器人只能对同一规格尺寸的管道进行清洁,当管道直径改变时,需要更换与之相应的管道机器人,使用较为不便,同时,现有的管道机器人清洗距离有限,当管道过长时,其内部某些部位无法进行清洗,实用性较差。
技术实现思路
1、本实用新型的目的在于提供一种管道清洗智能机器人,以解决上述背景技术中提出的问题。
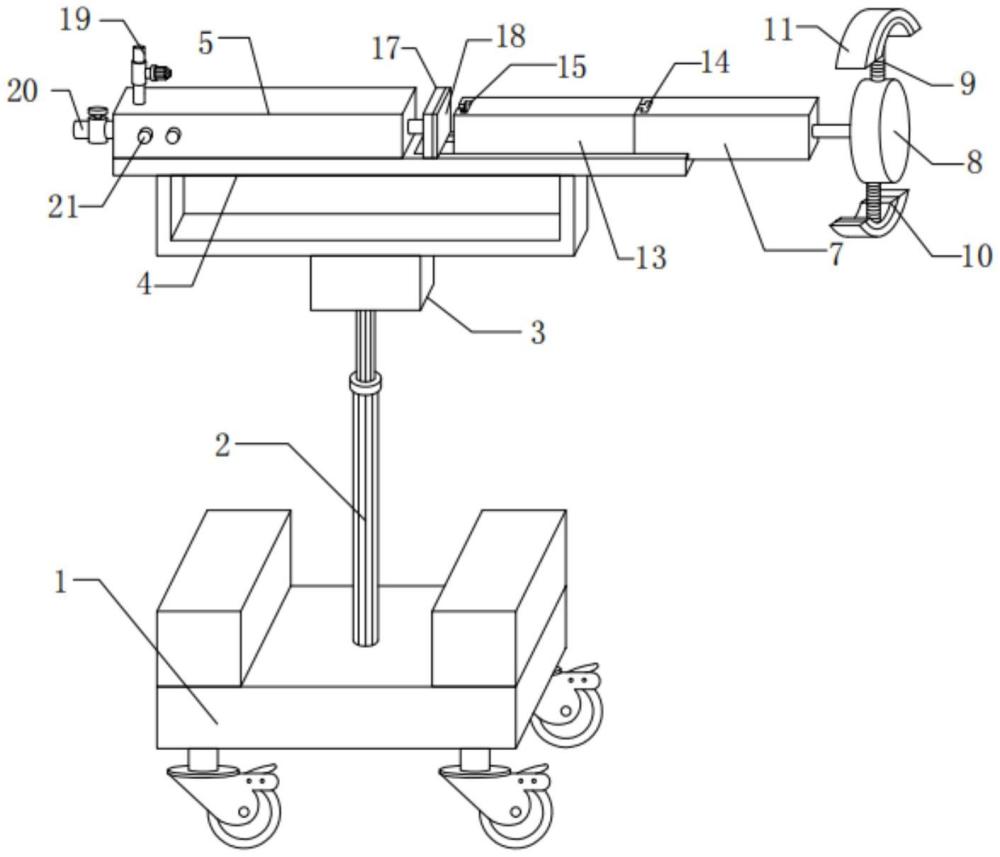
2、为实现上述目的,本申请提供如下技术方案:一种管道清洗智能机器人,包括底座,所述底座底部外壁四周均设置有万向轮,所述底座顶部外壁两端均设置有配重块,所述底座顶部外壁中间位置安装有电动伸缩杆,所述电动伸缩杆末端设置有安装座,所述安装座顶部外壁插接有安装架,所述安装架顶部外壁一端设置有控制槽,所述安装架顶部外壁远离开设有移动槽,所述移动槽内壁滑动安装有清洁组件,所述清洁组件包括滑动安装于移动槽内壁的控制杆,所述控制杆外壁转动安装有控制盘,所述控制盘与控制杆相适配。
3、优选的,所述控制盘顶部与底部外壁均通过螺纹转动安装有螺纹杆,所述螺纹杆末端转动安装有固定件,所述固定件外壁粘接有清洁垫,所述清洁垫与固定件相适配,所述清洁垫厚度小于固定件厚度。
4、优选的,所述控制杆内壁开设有驱动槽,所述驱动槽内壁安装有伺服电机,所述伺服电机的输出轴与控制盘连接。
5、优选的,所述移动槽内壁放置有延伸杆,所述延伸杆靠近控制杆一端焊接有安装块,所述延伸杆远离安装块一端与控制杆靠近延伸杆一侧外壁均开设有与安装块相适配的安装槽。
6、优选的,所述控制槽内壁设置有活塞,所述活塞一侧设置有贯穿控制槽的推板,所述推板外壁设置有与其相适配的防护垫,所述防护垫厚度小于推板厚度。
7、优选的,所述控制槽顶部外壁设置有进气管,所述控制槽远离控制杆一侧外壁设置有通入控制槽内部的出气管,所述进气管外壁安装有抽气泵,所述出气管外壁安装有电控阀,所述控制槽外壁安装有控制按钮,所述控制按钮通过导线分别与抽气泵、控制按钮连接,所述控制槽安装有供能电池,所述供能电池通过导线与抽气泵、电控阀连接。
8、本实用新型中,控制杆沿着移动槽内壁推动,使得控制盘清洁垫逐渐进入管道内部,接着伺服电机驱动控制盘盘转动进而带动固定件转动,随着固定件的不断转动,清洁垫随之转动对管道内壁进行清洁,操作简单,使用方便,同时由于固定件通过螺纹杆与控制盘连接,通过转动螺纹杆即可对固定件之间的间距进行调整,相比于传统装置,能根据需要清洁的管道规格不同调整清洁垫之间的间距,因此能对不同尺寸的管道进行清洁,使用更加方便。
9、本实用新型中,随着固定件逐渐深入管道内部,控制杆的长度逐渐变短,此时,将延伸杆与控制杆通过安装块与安装槽进行连接,便于将延伸杆与控制杆延长从而使得固定件对管道更深处进行清洁,使用更加方便。
技术特征:
1.一种管道清洗智能机器人,包括底座(1),其特征在于:所述底座(1)底部外壁四周均设置有万向轮,所述底座(1)顶部外壁两端均设置有配重块,所述底座(1)顶部外壁中间位置安装有电动伸缩杆(2),所述电动伸缩杆(2)末端设置有安装座(3),所述安装座(3)顶部外壁插接有安装架(4),所述安装架(4)顶部外壁一端设置有控制槽(5),所述安装架(4)顶部外壁远离开设有移动槽(6),所述移动槽(6)内壁滑动安装有清洁组件,所述清洁组件包括滑动安装于移动槽(6)内壁的控制杆(7),所述控制杆(7)外壁转动安装有控制盘(8),所述控制盘(8)与控制杆(7)相适配。
2.根据权利要求1所述的一种管道清洗智能机器人,其特征在于:所述控制盘(8)顶部与底部外壁均通过螺纹转动安装有螺纹杆(9),所述螺纹杆(9)末端转动安装有固定件(10),所述固定件(10)外壁粘接有清洁垫(11),所述清洁垫(11)与固定件(10)相适配,所述清洁垫(11)厚度小于固定件(10)厚度。
3.根据权利要求2所述的一种管道清洗智能机器人,其特征在于:所述控制杆(7)内壁开设有驱动槽,所述驱动槽内壁安装有伺服电机(12),所述伺服电机(12)的输出轴与控制盘(8)连接。
4.根据权利要求1所述的一种管道清洗智能机器人,其特征在于:所述移动槽(6)内壁放置有延伸杆(13),所述延伸杆(13)靠近控制杆(7)一端焊接有安装块(14),所述延伸杆(13)远离安装块(14)一端与控制杆(7)靠近延伸杆(13)一侧外壁均开设有与安装块(14)相适配的安装槽(15)。
5.根据权利要求1所述的一种管道清洗智能机器人,其特征在于:所述控制槽(5)内壁设置有活塞(16),所述活塞(16)一侧设置有贯穿控制槽(5)的推板(17),所述推板(17)外壁设置有与其相适配的防护垫(18),所述防护垫(18)厚度小于推板(17)厚度。
6.根据权利要求1所述的一种管道清洗智能机器人,其特征在于:所述控制槽(5)顶部外壁设置有进气管(19),所述控制槽(5)远离控制杆(7)一侧外壁设置有通入控制槽(5)内部的出气管(20),所述进气管(19)外壁安装有抽气泵,所述出气管(20)外壁安装有电控阀,所述控制槽(5)外壁安装有控制按钮(21),所述控制按钮(21)通过导线分别与抽气泵、控制按钮(21)连接,所述控制槽(5)安装有供能电池,所述供能电池通过导线与抽气泵、电控阀连接。
技术总结
本技术公开了一种管道清洗智能机器人,涉及管道清洁技术领域,包括底座,所述底座底部外壁四周均设置有万向轮,所述底座顶部外壁两端均设置有配重块,所述底座顶部外壁中间位置安装有电动伸缩杆,所述电动伸缩杆末端设置有安装座,所述安装座顶部外壁插接有安装架,所述安装架顶部外壁一端设置有控制槽,所述安装架顶部外壁远离开设有移动槽,所述移动槽内壁滑动安装有清洁组件,所述清洁组件包括滑动安装于移动槽内壁的控制杆。本技术中,使用时,通过转动螺纹杆即可对固定件之间的间距进行调整,相比于传统装置,能根据需要清洁的管道规格不同调整清洁垫之间的间距,因此能对不同尺寸的管道进行清洁,使用更加方便。
技术研发人员:吕科
受保护的技术使用者:南通智客机器人自动化有限责任公司
技术研发日:20230825
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!