一种基于视觉识别定位的喷涂机器人的制作方法
[0001]
本发明涉及喷涂设备,具体为一种基于视觉识别定位的喷涂机器人。
背景技术:
[0002]
喷涂机器人又叫喷漆机器人,是可进行自动喷漆或喷涂其他涂料的工业机器人,喷漆机器人主要由机器人本体、计算机和相应的控制系统组成,液压驱动的喷漆机器人还包括液压油源,如油泵、油箱和电机等,多采用5或6自由度关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动,较先进的喷漆机器人腕部采用柔性手腕,既可向各个方向弯曲,又可转动,其动作类似人的手腕,能方便地通过较小的孔伸入工件内部,喷涂其内表面,基于视觉识别定位的喷涂机器人可以通过监控探头自动识别工件进行喷涂作业。。
[0003]
但在具体实施时,机器人的手腕较为粗,仅仅通过机器人手腕的转动不能很好的对小孔工件内部进行喷涂。因此我们对此做出改进,提出一种基于视觉识别定位的喷涂机器人。
技术实现要素:
[0004]
为了解决上述技术问题,本发明提供了如下的技术方案:
[0005]
本发明一种基于视觉识别定位的喷涂机器人,包括主段机械臂、活动连接于主段机械臂顶部的二段机械臂、转动连接于二段机械臂前端的旋转臂以及活动连接于旋转臂前端的三段机械臂,所述三段机械臂的顶部设有监控探头,所述监控探头通过探头支撑架与三段机械臂活动连接,所述监控探头的前端穿插设有摄像镜头,所述摄像镜头的前端设有镜片清洗结构,所述三段机械臂的内部设有可调节喷头结构,所述可调节喷头结构包括固定连接于三段机械臂内部的电动伸缩杆,所述电动伸缩杆的推杆固定连接设有调节电机,所述调节电机的转轴铰接设有调节杆,所述调节杆的端部通过球形轴活动设有喷漆喷头,所述喷漆喷头的圆周侧固定套设有螺旋软管,所述半球形轴嵌设于三段机械臂的前端中部,所述喷漆喷头边侧连通设有螺旋软管。
[0006]
作为本发明的优选技术方案,所述镜片清洗结构包括固定连接于监控探头底端的清洗液瓶、固定连接于监控探头前端的半圆罩以及固定连接于监控探头内部的旋转电机,所述半圆罩于清洗液瓶通过连接管连通,所述连接管的内部设有吸水棉芯,所述吸水棉芯的底端于清洗液瓶内部的底端接触,所述半圆罩的内部设有吸水海绵套以及固定连接于吸水海绵套顶端的硬质海绵,所述吸水海绵套的内部设有探头镜片,所述探头镜片穿过硬质海绵,所述探头镜片与摄像镜头的前端接触,所述旋转电机的转轴固定设有延长杆,所述延长杆固定穿插于探头镜片的中部。
[0007]
作为本发明的优选技术方案,所述清洗液瓶的边侧开设有添液孔,所述添液孔的内部螺纹连接有加液盖,所述加液盖的圆周侧设有防滑纹。
[0008]
作为本发明的优选技术方案,所述监控探头前端的四边角穿插设有喷嘴。
[0009]
作为本发明的优选技术方案,所述半圆罩的中部固定设有轴承,所述延长杆通过轴承与半圆罩的中部活动连接。
[0010]
作为本发明的优选技术方案,所述摄像镜头前端圆周侧粘连设有软垫。
[0011]
根据上述技术方案,本发明提供的一种基于视觉识别定位的喷涂机器人:
[0012]
1.通过设有的三段机械臂,能够控制较细的喷头进行角度调节,相对于机械手腕的转动,喷头更容易在小孔内活动,解决了机器人手腕的转动不能很好的对小孔工件内部进行喷涂的问题;
[0013]
2.通过设有的镜片清洗结构,喷头喷出的漆处于雾化状态,容易在空气中弥散,镜片清洗结构对探头镜片进行擦拭,清除镜片表面的漆点,使探头定位更加准确
[0014]
本发明的其他特征和优点将在随后的具体实施方式部分予以详细说明;而且本发明中未涉及部分均与现有技术相同或可采用现有技术加以实现。
附图说明
[0015]
附图是用来提供对本发明的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明,但并不构成对本发明的限制。在附图中:
[0016]
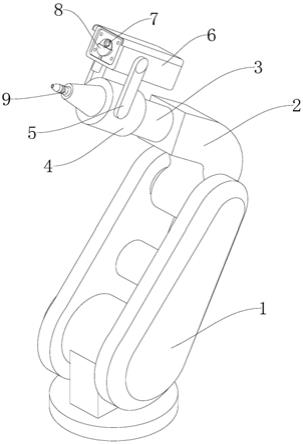
图1是本发明一种基于视觉识别定位的喷涂机器人的结构示意图;
[0017]
图2是本发明一种基于视觉识别定位的喷涂机器人中三段机械臂的结构示意图;
[0018]
图3是本发明一种基于视觉识别定位的喷涂机器人中镜片清洗结构的结构示意图;
[0019]
图4是本发明一种基于视觉识别定位的喷涂机器人中镜片清洗结构的剖面结构示意图。
[0020]
附图标记说明
[0021]
图中:1、主段机械臂;2、二段机械臂;3、旋转臂;4、三段机械臂;5、探头支撑架;6、监控探头;7、摄像镜头;8、镜片清洗结构;81、清洗液瓶;82、连接管;83、吸水棉芯;84、半圆罩;85、探头镜片;86、吸水海绵套;87、硬质海绵;88、旋转电机;89、延长杆;9、可调节喷头结构;91、电动伸缩杆;92、调节电机;93、调节杆;94、喷漆喷头;95、螺旋软管;96、半球形轴;10、加液盖。
具体实施方式
[0022]
以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
[0023]
在本发明中,在未作相反说明的情况下,“上、下、内、外”等包含在术语中的方位词仅代表该术语在常规使用状态下的方位,或为本领域技术人员理解的俗称,而不应视为对该术语的限制。
[0024]
实施例:如图1、图2、图3和图4所示,本发明一种基于视觉识别定位的喷涂机器人,包括主段机械臂1、活动连接于主段机械臂1顶部的二段机械臂2、转动连接于二段机械臂2前端的旋转臂3以及活动连接于旋转臂3前端的三段机械臂4,三段机械臂4的顶部设有监控探头6,监控探头6通过探头支撑架5与三段机械臂4活动连接,监控探头6的前端穿插设有摄像镜头7,摄像镜头7的前端设有镜片清洗结构8,三段机械臂4的内部设有可调节喷头结构
9,可调节喷头结构9包括固定连接于三段机械臂4内部的电动伸缩杆91,电动伸缩杆91的推杆固定连接设有调节电机92,调节电机92的转轴铰接设有调节杆93,调节杆93的端部通过球形轴活动设有喷漆喷头94,喷漆喷头94的圆周侧固定套设有螺旋软管95,半球形轴96嵌设于三段机械臂4的前端中部,喷漆喷头94边侧连通设有螺旋软管95。
[0025]
其中,镜片清洗结构8包括固定连接于监控探头6底端的清洗液瓶81、固定连接于监控探头6前端的半圆罩84以及固定连接于监控探头6内部的旋转电机88,半圆罩84于清洗液瓶81通过连接管82连通,连接管82的内部设有吸水棉芯83,吸水棉芯83的底端于清洗液瓶81内部的底端接触,半圆罩84的内部设有吸水海绵套86以及固定连接于吸水海绵套86顶端的硬质海绵87,吸水海绵套86的内部设有探头镜片85,探头镜片85穿过硬质海绵87,探头镜片85与摄像镜头7的前端接触,旋转电机88的转轴固定设有延长杆89,延长杆89固定穿插于探头镜片85的中部。
[0026]
其中,清洗液瓶81的边侧开设有添液孔,添液孔的内部螺纹连接有加液盖10,加液盖10的圆周侧设有防滑纹,方便向清洗液瓶81中添加清洗液。
[0027]
其中,监控探头6前端的四边角穿插设有喷嘴,吹掉起雾,减少探头镜片85表面沾染的漆。
[0028]
其中,半圆罩84的中部固定设有轴承,延长杆89通过轴承与半圆罩84的中部活动连接,有利于延长杆89的稳定。
[0029]
其中,摄像镜头7前端圆周侧粘连设有软垫,避免探头镜片85被磨花。
[0030]
工作时,首先将喷嘴与气泵连通,螺旋软管95通过输液泵与漆箱连通,监控探头6通过摄像镜头7的拍摄对工件进行定位,然后输液泵将漆箱中的漆通过螺旋软管95输送到喷漆喷头94后,通过喷漆喷头94喷出到工件表面,当需要对小孔工件内部进行喷漆时,将喷头伸入小孔中,调节电机92带动调节杆93转动,调节杆93带动喷漆喷头94的后端转动,从而控制半球形轴96的喷口处旋转,球形轴的存在使喷漆喷头94不会自转,电动伸缩杆91控制调节电机92的前后位移,通过改变调节杆93于喷漆喷头94之间的角度,从而调节喷漆喷头94于三段机械臂4之间的角度,能够控制较细的喷头进行角度调节,相对于机械手腕的转动,喷头更容易在小孔内活动,解决了机器人手腕的转动不能很好的对小孔工件内部进行喷涂的问题,喷头喷出的漆处于雾化状态,容易在空气中弥散,然后沾染到探头镜片85的表面,清洗液瓶81内部的清洗液通过吸水棉芯83吸到吸水棉芯83的顶部,然后被吸水海绵套86吸收,旋转电机88通过延长杆89带动探头镜片85转动,探头镜片85表面的漆点被吸水海绵套86中的清洗液溶解,然后被硬质海绵87擦拭掉,从而始终保持探头镜片85的清晰,利用吸水棉芯83和吸水海绵套86的吸水的方式,能够大量减少清洗液的使用量,使探头定位更加准确。
[0031]
以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种简单变型,这些简单变型均属于本发明的保护范围。
[0032]
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。
[0033]
此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本
发明的思想,其同样应当视为本发明所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1