基于ACO-BP的多目标碾米机组调度优化系统
基于aco
‑
bp的多目标碾米机组调度优化系统
技术领域
1.本发明涉及大米加工技术领域,尤其涉及一种基于aco
‑
bp的多目标碾米机组调度优化系统。
背景技术:
2.近年来,大米加工行业的生产设备自动化发展迅速,其中的碾米设备现已有单台碾米机控制系统,常为通过监测单个米机的碾辊轴转速和碾白室温升状态,再利用pid控制或模糊控制等调节方式来对进料口流量或主轴电机转速进行控制。现阶段碾米机组加工功能简单,控制系统调控单台碾米机加工效率低,机组生产能耗高,加工后精米质量不一。
技术实现要素:
3.本发明的目的就在于为了解决上述问题而提供一种基于aco
‑
bp的多目标碾米机组调度优化系统。
4.本发明通过以下技术方案来实现上述目的:
5.本发明一种基于aco
‑
bp的多目标碾米机组调度优化系统,包括多组碾米机组、数据中心和scada系统,每组所述碾米机组均能够读取所述数据中心的数据,所述数据中心上建立各组所述碾米机组的实时数据缓存区,通过所述scada系统分析和筛选数据,由opc服务器与scada系统交换信息,在数据中心建立智能碾米机组数据库,通过scada系统分析碾米工艺的各项技术经济数据,获取最佳碾米机组数据运行方案,并将各碾米机组的运行控制参数写入到数据中心,供终端设备调用执行。4个单体智能碾米机组成一组碾米机组,一组所述碾米机组中的单个碾米机作为单个智能体,每个智能体均能够通过触摸屏手动调节和机组控制系统在线调控,一组所述碾米机组中相邻的两个碾米机通过对出料口和进料口的检测数据,利用模拟量来调控机组内部流量。
6.所述碾米机由进料斗、碾白室、主碾轴、出料口、吸风装置、流量调节装置、喷风装置和机架组成,所述进料斗与所述碾白室连接,所述主碾轴位于所述碾白室中,所述碾白室的出料口与所述吸风装置连接,所述进料斗与所述碾白室之间设置有流量调节装置,所述碾白室的入口处设置有喷风装置,所述碾白装置设置于机架上。
7.多组所述碾米机组控制系统采用多核的任务调度算法进行调控,主要的列表调度算法包括任务列表排序和列表调度两部分,利用任务优先级计算方法判断任务的优先级并确定任务的执行顺序,再根据顺序分配到合适的计算单元完成调度,碾米机组控制系统主要输入检测量分别为进料口处的流量q1检测,碾白室内的温度t1和压力p1,以及碾辊轴速v1,喷风装置的喷风风压p2,吸风装置的风压p3,出料口处凉米斗的流量检测q2,其中的精米率和白度检测作为评价标准;输出调控量有对进料流量调控的进料口开度d1,碾辊轴转速调控v1x,喷风风压调控p2x,吸风风压调控p3x,计算从入口节点到任务nk的最长路径的长度作为任务nk的权值,最长路径指包含路径上所有任务节点和通讯边的权值之和;
[0008][0009]
所述碾米机组控制系统bp神经网络输入层6个节点主要是流量q1,碾白室温度t1、压力p1,碾辊轴转速v1,喷风风压p2,吸风风压p3,输出层4个节点主要调控的是进料口开度d1,碾辊转速修正v1x,喷风风压调整p2x,吸风风压调整p3x;
[0010]
在神经网络初始化时,其中x(i)表示神经网络输入,y(i)表示神经网络的期望输出,设定输入层的节点数个数为n个,隐含层节点个数为l个,输出层个数为m个,网络输入层和隐含层之间的连接权重ω
ij
,隐含层和输出层之间的连接权重ω
jk
,隐含层阀值a
j
,输出层阀值b
k
,学习速率为η,激励函数为
[0011][0012]
隐含层的输出:
[0013]
输出层的输出:
[0014]
误差的计算:取误差公式为
[0015]
其中y
k
‑
o
k
=e
k
,
[0016]
权值更新公式:
[0017]
ω
jk
=ω
jk
+ηh
j
e
k
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0018]
aco
‑
bp具体优化步骤为:
[0019]
(1)初始化参数,设置bp神经网络参数,训练误差ε,学习效率η,最大迭代次数n
max
;设置集合c
i
中元素j的初始信息素值为τ
j
(c
i
),初始集合确定蚁群算法时间为t,迭代次数为n
t
=0,信息素初值值为τ0,初始浓度相同,信息挥发系数ρ,最大迭代次数为n
max
。
[0020]
(2)蚂蚁状态更新选择参数,有m只蚂蚁位于蚁穴初始位置,蚂蚁i随机从集合c
i
选择某一集合中的一组权值和阀值,然后按照概率p
i
公式选择下一个集合并随机选择一组权值和阀值,直到每只蚂蚁挑选的所有元素组合构成神经网络的一组初始权值与阀值,其中,τ
j
(c
i
)为集合c
i
中的某j组权值和阀值组合的信息素值;
[0021][0022]
(3)在m只蚂蚁循环结束后,将选出的m组初始权值和阀值代入网络,计算bp神经网络实际输出和期望输出的误差ε,记录最小误差ε
min
,并比较ε
min
与期望误差e的大小,若ε
min
<e,即所对应的蚂蚁参数为最优解,则执行步骤5,否则继续下一步骤。
[0023]
(4)信息素的更新,为信息素的分配更加合理,对信息素的更新规则进行改进。当
所有蚂蚁完成全部集合的一次循环后,按照下列式(式1,2)对信息素进行更新;
[0024]
τ
j
(c
i
)(t+1)=(1
‑
ρ)τ
j
(c
i
)(t)+ρδτ
j
(c
i
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0025][0026]
式中:q为常数,通常取1;
[0027]027]
为最优解对应的最小误差;
[0028]
(5)重复上述步骤2、3,直到最小误差满足条件或所有蚂蚁收敛到同一组路径,迭代次数满足最大迭代次数n
max
,结束循环;
[0029]
(6)将算法优化得到蚂蚁参数作为bp神经网络的初始权重和阀值,不断更新迭代bp神经网络连接权值和阀值,直到达到所设定的误差要求或者最大迭代次数,完成训练;
[0030]
(7)输出训练好的蚁群优化bp神经网络模型。
[0031]
本发明设计了包含16台智能碾米机的碾米机组,分为4小组机组,每组为四道碾米,机组控制系统包含三部分,主要是机组内部四道碾米加工参数优化、机组的组与组之间参数调度优化、数据库的自学习。
[0032]
机组控制系统对组内间的参数优化,主要是根据加工精米的要求细化分配到四道碾米,每道碾米的加工参数依据分配的加工目标调试合适参数,利用蚁群算法(aco)训练bp神经网络优化网络模型,将加工参数训练优化至最佳;
[0033]
机组控制系统对组与组间的调度优化,主要是实现碾米机组的多目标加工,将低能耗、低碎米率、高效率、高质量等多个目标纳入加工对象。机组将同一精米要求分配到四组碾米机,根据四个小组调控不同的加工参数和加工后对精米的评价,择优出每道碾米最佳加工参数,利用调度算法优化对组与组之间实行在线调控每道碾米机参数,同时将数据上传至数据库为后续的加工方案优化提供基础。
[0034]
机组的数据库优化主要分为加工方案数据优化和每道碾米单台米机加工参数优化,根据专家经验设定初始值,在后续不断的加工不同精米的品种和精度要求,以及加工后的产品质量评价,经迭代优化调整至最佳加工方案。
[0035]
本发明的有益效果在于:
[0036]
本发明是一种基于aco
‑
bp的多目标碾米机组调度优化系统,与现有技术相比,本发明具有如下技术效果:
[0037]
1)本发明设计了4*4的碾米机组控制系统,机组之间利用调度优化可以实现多目标加工,优化每道碾米的加工参数,能降低碾米机的碎米率,提高机组加工效率。
[0038]
2)机组控制系统对机组内部利用算法优化,可根据单体加工目标调控每个碾米的加工参数,实现机组的在线碾白精度智能控制,减低碾米机的运行成本。
[0039]
3)利用蚁群算法(aco)优化bp神经网络的方式搭建碾米机组控制系统,蚁群算法能够加快神经网络的学习速率,更快的收敛于最佳参数,搭建最佳调控碾米机组的神经网络模型。
[0040]
4)搭建的碾米机组数据库,通过对产品的评价和神经网络的学习能力,能对加工参数和加工方案进行迭代优化,实习数据库的自学习。
附图说明
[0041]
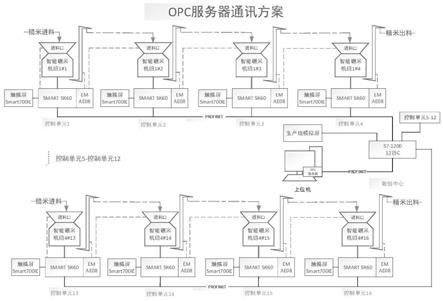
图1是本发明的系统控制框图;
[0042]
图2是本发明的砂辊喷风碾米机结构图;
[0043]
图3是本发明的碾米机检测与调控图;
[0044]
图4是本发明的bp神经网络拓扑图;
[0045]
图5是本发明的算法优化流程图。
具体实施方式
[0046]
下面结合附图对本发明作进一步说明:
[0047]
一、控制系统网络结构设计
[0048]
1.系统通讯结构
[0049]
智能碾米机组调度与控制系统,由多组[智能碾米机组]、[数据中心]及[scada系统]组成。系统采用集中分布式结构,[智能碾米机组]采用本地控制器,[数据中心]采用中央控制器,控制器、数据中心以及scada系统之间采用工业以太网通信方式,各[碾米机组]可实时读写[数据中心]的数据,在[数据中心]上建立各机组实时数据缓存区,通过scada系统分析和筛选数据,由opc服务器与scada系统交换信息,在数据中心建立智能碾米机组数据库,通过scada系统分析碾米工艺的各项技术经济数据,找出最佳碾米机组数据运行方案,并将各[智能碾米机组]的运行控制参数写入到[数据中心],供终端设备调用执行。每套碾米机组均配置现场控制触摸屏。系统最多可组成4组智能碾米机组,每组4台智能碾米机。其控制系统框图如图1所示;
[0050]
单机控制器输入输出及其存储分配(表1~表4)
[0051]
为了提高设备的可靠性、稳定性、控制系统智能化功能以及性价比,单台智能碾米机单机控制单元采用西门子smart200系列可编程控制器及其模拟量扩展模块em ae08.所有单机配置控制器配置相同,不同单元修改相应的ip地址即可。
[0052]
输入输出单元分配
[0053]
表1数字量输入表
[0054]
[0055][0056]
表2.数字量输出表
[0057]
输出功能说明1y1下闸门关闸运行2y1下闸门开闸运行3y2加压:左加压4y2减压:左减压5y3加压:左加压6y3减压:左减压7y4上闸:=0关闸,=1开闸;8温度通道选通信号,9本控制箱制冷扇热器驱动信号,=1制冷;10重量检测执行机构;扩展em223模块11制冷系统驱动信号;扩展em223模块12制热系统驱动信号;扩展em223模块13白度检测机构驱动信号;扩展em223模块
[0058]
表3.模拟量输出
[0059]
输入功能说明aiw0米机电机电流信号;aiw2温度信号;aiw4重量传感器信号;扩展em231模块aiw6机内负压传感器信号;扩展em231模块aiw8重量传感器信号;扩展em231模块aiw10重量传感器信号;扩展em231模块
[0060]
存储器分配(所有控制单元相同配置)
[0061]
表4.存储分配表
[0062][0063][0064]
数据中心
[0065]
为了提高智能碾米机效能,[数据中心]cpu1215c是本系统的小型“动态数据库”,实现智能碾米机之间的数据交换,记录实时动态数据;它又是[智能碾米机]与[scada系统]信息中转站(从站),通过opc服务器为scada系统(opc客户机主站)提供实时读写小型“动态数据库”数据;对于碾米生产线具有plc控制系统模拟屏的用户,采用smart200可为碾米生产线plc控制系统模拟屏提供碾米机屏显状态信号,并与之交换控制参数及相关信息。其存储分配如下。
[0066]
存储器分配
[0067]
在[数据中心]cpu建立16台智能碾米机动态数据库,见下表
[0068]
表5单机控制单元与数据中心间存储分配表(16台米机)
[0069]
[0070]
[0071][0072][0073]
数据中心存储分配方法
[0074]
1.首先建立16台[智能碾米机]共用读写[数据中心]数据缓存区;
[0075]
2.通过[数据中心]写16台智能碾米机控制参数,在[智能碾米机]上建立存储器号相同的数据缓存区;其分配方式如下
[0076]
表6米机写数据缓存工作公用缓存区表
[0077][0078][0079]
表7数据中心写米机数据区表
[0080][0081][0082]
scada系统设计
[0083]
scada系统采用组态(wincc或者组态王),建立pc与数据中心的数据交换,在pc计算机上建立智能碾米机组的大型数据库,各种实时状态监控、数据管理、数据分析等界面,本系统实现的功能如下:
[0084]
通讯程序
[0085]
1.scada系统通过opc服务器读写[数据中心]从站数据;
[0086]
2.控制室通过scada系统下载各plc程序;
[0087]
3.通过互联网程监控和程序升级;
[0088]
建立本系统数据库:在scada系统建立16台智能碾米机数据库,设备启动到停机1次为一个记录,数据库记录字段见表8
[0089]
表8系统数据库字段表与地址分配表
[0090][0091][0092]
[0093][0094][0095][0096][0097]
人机界面功能:
[0098]
(1)工作状态动态界面:实时显示各智能碾米机工作状态,电流、流量、碾白压力、
温升
…
;
[0099]
(2)原料产品参数界面:该界面输入原料参数如稻谷品种、水分、出糙率、整精米率、成品精度
…
;
[0100]
(3)运行参数动态界面:已列表的形式实时显示各智能碾米机技术经济数据;
[0101]
(4)控制参数设置界面:设置各台米机关键运行控制参数如电流、流量、压力的控制点(不变参数如机型、动力及矫正系数等在该机触摸屏设置);
[0102]
(5)故障报警功能:显示故障点及故障说明;
[0103]
工艺运行方案子程序:
[0104]
(1)生产线流量平衡:根据流量平衡原则,保证加工产量和减少断料造成的碎米增加,做到碾米机工段岗各机不断料:后道提升机未停过机(vb559=0),后仓料满次数超每超过3次(vb2205>3),本机闸门开控率加大2%(vb2240=vb2240+2);
[0105]
(2)控制碾米段增碎:保证加工产量和成品精度为前提,合理布局各道碾米机的的碾白压力(碾减率),确定各道碾米机的碾白压力控制值及温升控制值;
[0106]
(3)产量最大化:保证成品精度和碾米增碎(第一道米机不断料)为前提,并在额度电流允许的情况下,均衡增减各台碾米机流量;
[0107]
基准时间的设定:以第一台米机时间为基准时间(第一台米机触摸屏设置),scada系统以第一台米机启动瞬间记忆其基准时间(运行电流vd2206>2.1a)。
[0108]
二、机组控制系统设计
[0109]
本设计的碾米机组控制系统包含16台智能碾米机,分为4组碾米机组,每组为四道碾米,以两台砂辊喷风碾米机和两台铁棍喷风碾米机组合作为一组实现四机出白,机组可按照精米要求或不同品种实现多目标加工,并对加工参数传送至数据库优化后可搭建加工配方。为了清晰的说明方法,以一台砂辊喷风碾米机的作为机械部分详细说明,以一组碾米机组作为控制系统说明,现仅选取部分检测参数,后续增加多台机组或传感器数量可以此类推。
[0110]
碾米机组改进
[0111]
本设计的加工工艺采用多机轻碾结合低温升碾米加工。现用一台砂辊喷风碾米机进行结构改进为例,如图2所示。
[0112]
本发明的碾米机组以完成精米精度要求为总体目标,将加工需求分配到四道碾米,为每台碾米机的加工目标匹配合适加工参数作为单体目标,预设每道碾米的碾除糠粉比例为3.5:3.0:2.0:1.5(可根据精米加工要求和品种调整)。机组控制系统以第一道碾米机作为主控对象,在线检测机组内部加工输入参数,经plc处理判断是否达到加工目标,若未能完成则对执行器输出参数,实现相应部件的调控。同时将调控记录和加工参数,以及加工后的精米质量检测上传至数据库,为后续方案调整提供数据基础。
[0113]
结合图2图3所示,本发明改进的碾米机组控制系统主要输入检测量分别为进料口
①
处的流量q1检测,碾白室
②
内的温度t1和压力p1,以及碾辊轴速v1,喷风装置
⑦
的喷风风压p2,吸风装置
⑤
的风压p3,出料口
④
处凉米斗的流量检测q2,其中的精米率和白度检测作为评价标准;输出调控量有对进料流量调控的进料口开度d1,碾辊轴转速调控v1x,喷风风压调控p2x,吸风风压调控p3x,具体检测与调控参数如图3所示。
[0114]
机组间调度优化
[0115]
机组加工同一目标时,加工初始时四个小组内的每道碾米加工参数差异会引起加工后精米质量不同,可根据对精米的质量评价调度每道碾米最佳的加工参数,提高碾米机组的加工效率和精米质量。
[0116]
本发明的机组控制系统采用多核的任务调度算法进行调控,主要的列表调度算法包括任务列表排序和列表调度两部分,是利用任务优先级计算方法判断任务的优先级并确定任务的执行顺序,再根据顺序分配到合适的计算单元完成调度。
[0117]
tl
‑
scheme(公式1)是一种常用的任务优先级计算方式,是一种自顶向下的加权模式,计算从入口节点到任务nk的最长路径的长度作为任务nk的权值,最长路径指包含路径上所有任务节点和通讯边的权值之和。任务的列表顺序是在调度的过程中实时更新的动态表,依据对精米的质量评价实时进行优先级计算进行排列,随着任务分配到其父节点所在的计算单元上,其原有的通讯边权值为0,后续任务节点的tl值也将发生改变。
[0118][0119]
机组内调控算法设计
[0120]
影响碾米机组加工效率的因素很多,且各个因素之间存在复杂的非线性关系,而智能控制中的人工神经网络是通过模拟人类大脑思维的习惯,能够以任意精度逼近任意非线性连续函数,其中bp神经网络是一种按照误差逆向传播算法训练的多层前馈神经网络。bp神经网络具有良好的容错性、自适应性以及自学习的性能,但在训练过程中学习速度较慢,容易陷入局部极限,针对这个问题,本设计利用蚁群算法(aco)来优化bp神经网络的碾米机组控制方法。其中的蚁群算法具有全局寻优强、搜索速度快、精度高等特点,经蚁群算法优化调整bp神经网络的权值和阀值,可以提高收敛速度和精度。
[0121]
bp神经网络设计
[0122]
误差反转(backpropagation)神经网络主要由部分组成:输入样本前向传播并输出结果、误差的反向传播更新网络权值。其工作原理是样本数据向前传播时,输入样本由输入层传入,经隐含层处理后传到输出层,若输出层的实际输出与期望输出不符,则进入误差反向传播更新网络权值阶段。误差的反向传播更新网络权值是将输出误差以某种形式通过隐含层向输入层逐层反转,并将误差分配给各层神经元各个神经单元,在不断的权值调整循环进行就是网络的学习过程,此过程一直进行到输出误差在设定范围内或学习次数结束为止。
[0123]
bp神经网络的拓扑结构如图4所示,其输入层6个节点主要是流量q1,碾白室温度t1、压力p1,碾辊轴转速v1,喷风风压p2,吸风风压p3,输出层4个节点主要调控的是进料口开度d1,碾辊转速修正v1x,喷风风压调整p2x,吸风风压调整p3x。
[0124]
在神经网络初始化时,其中x(i)表示神经网络输入,y(i)表示神经网络的期望输出,设定输入层的节点数个数为n个,隐含层节点个数为l个,输出层个数为m个,网络输入层和隐含层之间的连接权重ω
ij
,隐含层和输出层之间的连接权重ω
jk
,隐含层阀值a
j
,输出层阀值b
k
,学习速率为η,激励函数为
[0125]
[0126]
隐含层的输出:
[0127]
输出层的输出:
[0128]
误差的计算:取误差公式为
[0129]
其中y
k
‑
o
k
=e
k
,
[0130]
权值更新公式:
[0131]
ω
jk
=ω
jk
+ηh
j
e
k
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0132]
aco
‑
bp设计
[0133]
蚁群算法(aco)是通过模拟自然界蚂蚁的寻径方式得到的一种启发式随机搜索算法,是一种结合分布式计算、正反馈机制和贪婪搜索的模拟进化算法。其原理是每个蚂蚁个体在觅食的过程中会不断分泌信息素来标识走过的路径,并能在一定范围然让其他蚂蚁察觉到信息素并影响它们的行为,当蚂蚁来回洞穴的路程短导致同一时间留下的信息素增加,引起路径上的蚂蚁增多至信息素强度再增加,最终影响范围增加形成自催化的行为,其中最短的路程上一定信息素最高,即为最优路线。
[0134]
蚁群算法优化bp神经网络的过程是将神经网络所有的权值和阀值的总个数确定为m个,每个权值和阀值有n个数值可以选择,n个数值在[0,1]中随机生成,形成集合c
i
(1<i<m)。现在有m只蚂蚁,每只蚂蚁根据转移概率p
i
选择路径同时记录权值和阀值数值,同时对比训练样本的输出误差和期望误差来调整蚂蚁行径上的信息素和路径选择,经过信息素τ的不断更新优化,最终收敛到同一路径完成迭代,得到最优初始解。最后将得到的最优初始解作为bp神经网络的初始权值和阀值进一步训练网络,直到误差精度达到期望值。具体的算法流程如图5所示。
[0135]
具体优化步骤为:
[0136]
(1)初始化参数,设置bp神经网络参数,训练误差ε,学习效率η,最大迭代次数n
max
;设置集合c
i
中元素j的初始信息素值为τ
j
(c
i
),初始集合确定蚁群算法时间为t,迭代次数为n
t
=0,信息素初值值为τ0,初始浓度相同,信息挥发系数ρ,最大迭代次数为n
max
。
[0137]
(2)蚂蚁状态更新选择参数,有m只蚂蚁位于蚁穴初始位置,蚂蚁i随机从集合c
i
选择某一集合中的一组权值和阀值,然后按照概率p
i
公式选择下一个集合并随机选择一组权值和阀值,直到每只蚂蚁挑选的所有元素组合构成神经网络的一组初始权值与阀值,其中,τ
j
(c
i
)为集合c
i
中的某j组权值和阀值组合的信息素值;
[0138][0139]
(3)在m只蚂蚁循环结束后,将选出的m组初始权值和阀值代入网络,计算bp神经网络实际输出和期望输出的误差ε,记录最小误差ε
min
,并比较ε
min
与期望误差e的大小,若ε
min
<
e,即所对应的蚂蚁参数为最优解,则执行步骤5,否则继续下一步骤。
[0140]
(4)信息素的更新,为信息素的分配更加合理,对信息素的更新规则进行改进。当所有蚂蚁完成全部集合的一次循环后,按照下列式(式1,2)对信息素进行更新;
[0141]
τ
j
(c
i
)(t+1)=(1
‑
ρ)τ
j
(c
i
)(t)+ρδτ
j
(c
i
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0142][0143]
式中:q为常数,通常取1;
[0144][0144]
为最优解对应的最小误差;
[0145]
(5)重复上述步骤2、3,直到最小误差满足条件或所有蚂蚁收敛到同一组路径,迭代次数满足最大迭代次数n
max
,结束循环;
[0146]
(6)将算法优化得到蚂蚁参数作为bp神经网络的初始权重和阀值,不断更新迭代bp神经网络连接权值和阀值,直到达到所设定的误差要求或者最大迭代次数,完成训练;
[0147]
(7)输出训练好的蚁群优化bp神经网络模型。
[0148]
以上显示和描述了本发明的基本原理和主要特征及本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1