一种基于燃气催化红外技术的低温粉末喷涂方法与流程
1.本发明涉及粉末喷涂领域,具体是一种基于燃气催化红外技术的低温粉末喷涂方法。
背景技术:
2.静电粉末喷涂工艺主要应用于金属表面喷涂,使粉末喷涂工艺应用于非金属表面成为可能。粉末涂料不含溶剂,依靠静电吸附到工件表面,互不粘连的粉末粒子层经过加热熔融后形成牢固涂层与工件表面紧密结合,与传统溶剂型和水性涂料相比,可以现在降低对环境的污染程度,粉末涂料不使用有机溶剂、水等挥发性物质,大大减少了来自于溶剂的污染,其中最主要的就是大幅度降低vocs的排放;喷涂利用率大幅度提高,与传统溶剂型或水性涂料相比,传统涂料利用率约为60%-65%,而粉末涂料利用率可接近100%,同时可全部实现回收利用;节约能源,粉末涂料固化时间短,大大减少了固化加温带来的能源浪费;涂膜性能优异,涂膜更加均匀,其耐摩擦性、抗冲击性、耐腐蚀性等性能优于传统涂装方式;易于形成高厚涂膜,可一次性达到50-300微米之间,并没有滴垂或积滞现象。鉴于以上优点,粉末喷涂工艺已成为涂装行业发展的趋势。
3.静电粉末喷涂一般固化温度为200℃,超过原木的碳化温度,对基材表面有伤害,限制了粉末静电喷涂的应用,由于燃烧利用率低而导致固化速率降低,而且针对复杂曲面喷涂时,由于喷涂距离控制不到位,导致喷涂的均匀性较差。因此,本领域技术人员提供了一种基于燃气催化红外技术的低温粉末喷涂方法,以解决上述背景技术中提出的问题。
技术实现要素:
4.本发明的目的在于提供一种基于燃气催化红外技术的低温粉末喷涂方法,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.一种基于燃气催化红外技术的低温粉末喷涂方法,包括如下步骤:
7.s101、喷涂前处理
8.采用链条输送链装置对喷涂零件进行输送,对喷涂零件进行表面处理和表面修正后,通过自动化烘干设备对喷涂零件进行烘干干燥,然后向喷涂零件表面均匀喷淋导电液;
9.s102、低温粉末喷涂
10.采用供粉机构进行供粉,采用喷涂执行机构对喷涂零件进行低温粉末喷涂;
11.s103、红外催化固化
12.采用蜂窝状pt催化剂燃烧板,使用天然气或液化石油气为燃料,产生3-5.5μm的中长波,具有更窄的能谱,可以使粉末一直处于主吸收区内,对喷涂后的零件进行固化;
13.s104、喷涂后处理
14.通过粉末回收机构实现粉末的回收利用,并减少粉末对外界环境的污染,通过大旋风机构形成负压,将未喷涂到表面的粉末回收至过滤系统中,经过过滤后,注入收集机构
中,收集到的粉末重新输送到供粉机构内部,实现对粉末的回收利用。
15.作为本发明进一步的方案:所述步骤s101中的表面处理为除掉产品表面油污和灰尘,表面修整为除掉产品表面的锈迹。
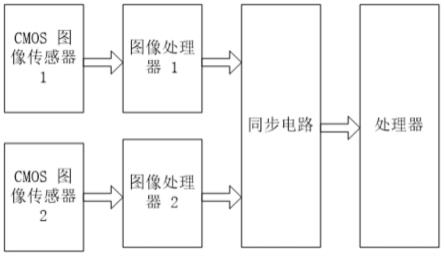
16.作为本发明进一步的方案:所述步骤s102包括用到的设备主要包括六自由度关节机器人系统和基于计算机视觉的3d实时建模系统,对于复杂曲面的产品,则引入3d机器人视觉系统,保证对复杂曲面的跟踪,实现等距喷涂,3d机器人视觉系统,采用双目视觉技术,基于视差原理,由不同位置的两台或者同一位置的一台摄像机经过位置移动或者旋转来拍摄同一副场景,通过计算对应点在两幅图像间的位置偏差,来获取物体三维几何信息。
17.作为本发明进一步的方案:根据获取物体三维几何信息,通过立体匹配得到的像素的视差,根据双目摄像头的内外参数及几何关系得到场景中所有物体的深度信息,局部匹配算法得到的是稀疏视差图,为得到像素的视差信息,需要将稀疏视差图进行插值、拟合得到稠密视差图,进而得到场景中物体的三维坐标,将复杂曲面离散化成点云集,通过3d视觉系统将点云集中的每一个点的坐标实时像素计算出来;对像素坐标系通过点云集的方法,将像素坐标系映射到空间坐标系,实现曲面的三维坐标映射,将曲面三维坐标通过以太网或者can总线将坐标数值输入至机器人控制系统,使机器人根据空间三维坐标自动循迹到指定喷涂位置。
18.作为本发明进一步的方案:所述步骤s103中催化燃烧由于催化剂的存在可以使燃烧反应在较低的活化能下实现贫碳氢化合物浓度下发生催化剂的引入,可以提供较低的反应活化能和更多的反应路径,引起异相催化反应,具体包括如下步骤:
19.s1031、首先天然气和液化石油气的主要反应成分碳氢化合物在pt催化剂表面被吸附;
20.s1032、其次天然气和液化石油气的主要反应成分碳氢化合物在pt催化剂表面进行分解,进而在催化剂表面复合成产物;
21.s1033、最后天然气和液化石油气的主要反应成分碳氢化合物从表面脱附,反应过程中产生放热,避免气相燃烧发出的可见光而产生的能量损失,其能量大部分转化为红外辐射,以红外辐射方式对外供能,对喷涂后的产品进行固化处理。
22.作为本发明进一步的方案:所述步骤s103的整个过程采用采用pid控制技术,控制固化温度低于150℃,通过实时采集表面温度,控制比例阀燃气流量实现温度的自动控制。
23.与现有技术相比,本发明的有益效果是:
24.1、本发明将复杂曲面离散化成点云集,通过3d视觉系统将点云集中的每一个点的坐标实时像素计算出来;对像素坐标系通过点云集的方法,将像素坐标系映射到空间坐标系,实现曲面的三维坐标映射,将曲面三维坐标通过以太网或者can总线将坐标数值输入至机器人控制系统,使机器人根据空间三维坐标自动循迹到指定喷涂位置,复杂曲面喷涂更加均匀,更加精准。
25.2、本发明中pt催化剂的薄膜结构可以吸附天然气和液化石油气反应物,pt催化剂可以降低反应物活化能,从而使反应物易于反应,增加反应速度。
26.3、本发明采用采用pid控制技术,控制固化温度低于150℃,通过实时采集表面温度,控制比例阀燃气流量实现温度的自动控制,可以确保温控更加精准,固化温度低于150℃,可以应用于木材、板材、塑料等不耐高温的材料表面,大大提高了静电粉末喷涂的应用
范围。
27.4、本发明通过前处理作业工序,可以确保产品表面更加平整,而且导电液的喷涂,可以确保低温粉末喷涂吸附的更加稳定牢固,耐用度更高。
28.5、本发明可以对喷涂过程中产生的粉末进行高效回收,通过大旋风机构一次吸收过滤,通过收集机构二次收集,然后回流到供粉机构内部,回收率更高而且可以确保供粉机构内部的环境质量
附图说明
29.图1为本发明中蜂窝状pt催化剂燃烧板的结构示意图;
30.图2为本发明中pt催化剂燃烧的原理图;
31.图3为本发明中燃气催化红外辐射波长与粉末材料吸收波长能谱图;
32.图4为本发明中双目3d视频采集系统硬件架构图。
具体实施方式
33.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.请参阅图1~4,本发明实施例中,一种基于燃气催化红外技术的低温粉末喷涂方法,包括如下步骤:
35.s101、喷涂前处理
36.采用链条输送链装置对喷涂零件进行输送,对喷涂零件进行表面处理和表面修正后,通过自动化烘干设备对喷涂零件进行烘干干燥,然后向喷涂零件表面均匀喷淋导电液;
37.s102、低温粉末喷涂
38.采用供粉机构进行供粉,采用喷涂执行机构对喷涂零件进行低温粉末喷涂;
39.s103、红外催化固化
40.采用蜂窝状pt催化剂燃烧板,使用天然气或液化石油气为燃料,产生3-5.5μm的中长波,具有更窄的能谱,可以使粉末一直处于主吸收区内,对喷涂后的零件进行固化;
41.s104、喷涂后处理
42.通过粉末回收机构实现粉末的回收利用,并减少粉末对外界环境的污染,通过大旋风机构形成负压,将未喷涂到表面的粉末回收至过滤系统中,经过过滤后,注入收集机构中,收集到的粉末重新输送到供粉机构内部,实现对粉末的回收利用。
43.通过采用上述技术方案,可以对喷涂过程中产生的粉末进行高效回收,通过大旋风机构一次吸收过滤,通过收集机构二次收集,然后回流到供粉机构内部,回收率更高而且可以确保供粉机构内部的环境质量。
44.其中,所述步骤s101中的表面处理为除掉产品表面油污和灰尘,表面修整为除掉产品表面的锈迹。
45.其中,所述步骤s102包括用到的设备主要包括六自由度关节机器人系统和基于计算机视觉的3d实时建模系统,对于复杂曲面的产品,则引入3d机器人视觉系统,保证对复杂
曲面的跟踪,实现等距喷涂,3d机器人视觉系统,采用双目视觉技术,基于视差原理,由不同位置的两台或者同一位置的一台摄像机经过位置移动或者旋转来拍摄同一副场景,通过计算对应点在两幅图像间的位置偏差,来获取物体三维几何信息。
46.其中,根据获取物体三维几何信息,通过立体匹配得到的像素的视差,根据双目摄像头的内外参数及几何关系得到场景中所有物体的深度信息,局部匹配算法得到的是稀疏视差图,为得到像素的视差信息,需要将稀疏视差图进行插值、拟合得到稠密视差图,进而得到场景中物体的三维坐标,将复杂曲面离散化成点云集,通过3d视觉系统将点云集中的每一个点的坐标实时像素计算出来;对像素坐标系通过点云集的方法,将像素坐标系映射到空间坐标系,实现曲面的三维坐标映射,将曲面三维坐标通过以太网或者can总线将坐标数值输入至机器人控制系统,使机器人根据空间三维坐标自动循迹到指定喷涂位置。
47.其中,所述步骤s103中催化燃烧由于催化剂的存在可以使燃烧反应在较低的活化能下实现贫碳氢化合物浓度下发生催化剂的引入,可以提供较低的反应活化能和更多的反应路径,引起异相催化反应,具体包括如下步骤:
48.s1031、首先天然气和液化石油气的主要反应成分碳氢化合物在pt催化剂表面被吸附;
49.s1032、其次天然气和液化石油气的主要反应成分碳氢化合物在pt催化剂表面进行分解,进而在催化剂表面复合成产物;
50.s1033、最后天然气和液化石油气的主要反应成分碳氢化合物从表面脱附,反应过程中产生放热,避免气相燃烧发出的可见光而产生的能量损失,其能量大部分转化为红外辐射,以红外辐射方式对外供能,对喷涂后的产品进行固化处理。
51.由于是以电磁波方式传递热量,不需要任何媒介,供能过程热损失小,与普通气相燃烧相比,具有如下优势:
52.(1)燃料反应效率高,反应速率快,在贫燃料条件下可以达到接近100%的燃烧效率;
53.(2)催化燃烧在催化剂表面的异相反应抑制了气相氧化反应,同时抑制氮氧化合物(nox)、一氧化碳(co)等产物的形成,实现近零排放,pt催化剂的薄膜结构可以吸附天然气和液化石油气反应物,pt催化剂可以降低反应物活化能,从而使反应物易于反应,增加反应速度。
54.本实施例中,所述步骤s103的整个过程采用采用pid控制技术,控制固化温度低于150℃,通过实时采集表面温度,控制比例阀燃气流量实现温度的自动控制,可以确保温控更加精准,固化温度低于150℃,可以应用于木材、板材、塑料等不耐高温的材料表面,大大提高了静电粉末喷涂的应用范围。
55.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1