一种用于蔬菜加工的破碎装置的制作方法
1.本发明涉及蔬菜加工技术领域,具体为一种用于蔬菜加工的破碎装置。
背景技术:
2.蔬菜是指可以做菜、烹饪成为食品的一类植物或菌类,蔬菜是人们日常饮食中必不可少的食物之一。蔬菜可提供人体所必需的多种维生素和矿物质等营养物质。当需要对大量的蔬菜进行加工时,往往会借助机器进行破碎,现有的蔬菜破碎机器主要是通过旋转的刀片进行切割,如专利cn211412255u公开的一种蔬菜加工用破碎装置、专利cn211412254u公开的一种蔬菜加工用破碎装置,其破碎方式是将蔬菜投入到破碎箱,通过旋转的破碎刀进行破碎。
3.目前的这种装置存在的最大问题为蔬菜投入时的角度、方向均不固定,蔬菜落入破碎箱比较凌乱,破碎刀对蔬菜的切割比较随意,导致破碎后的菜叶大小不均匀,而且对于比较细长的蔬菜,如芹菜,在切割过程中,很容易从破碎刀之间的缝隙中掉落,使得最终破碎后的长短不一;而对于比较软的蔬菜,如菠菜,随着破碎刀的旋转进入到破碎刀之间的缝隙内,菜叶在刀缝之间被破碎刀磨损后掉落,导致菜叶的破损,最终影响食用质量。因此,现有的蔬菜破碎装置存在破碎长度不均匀、容易导致蔬菜破损的问题。
技术实现要素:
4.本发明就是针对现有技术存在的上述不足,提供一种用于蔬菜加工的破碎装置,采用由上往下直接对蔬菜进行切割的方式进行破碎,保证了蔬菜破碎后的质量,刀具采用多个切刀组合的方式,不仅提高了切割速度,而且保证切割长度的均匀性,解决了现有切割装置对蔬菜随意切割,长度与质量无法保证的问题,使用更加可靠。
5.为实现上述目的,本发明提供如下技术方案:一种用于蔬菜加工的破碎装置,包括机壳,所述机壳的一端设有进料口,机壳的另一端设有出料口,机壳内设有用于切割蔬菜的刀具,所述机壳的底部设有底座,机壳内设有水平设置的上输送带,所述上输送带的外侧壁上并排设置有定位架,所述刀具包括多把间隔均匀且平行的切刀,切刀与机壳内上、下移动并与定位架配合,所述进料口处设有对蔬菜前端定位的定位板,所述出料口的下方设有后集料箱,机壳的侧壁上设有控制装置的控制器和开关。
6.优选的,所述定位板的上端通过转轴与机壳连接,定位板的侧壁上连接有推板,所述推板和机壳之间通过第一气缸连接。
7.优选的,所述定位板的一侧设有定长板,所述定长板位于上输送带的上端且位于进料口的外侧,所述定长板的上端设有推杆,所述推杆的两端设有推块,所述机壳的侧壁上设有滑槽,所述推块上设有与滑槽配合的移动块。
8.优选的,所述定位架包括托块,所述托块与上输送带固定,所述托块的两端设有挡板,相邻挡板之间设有与切刀配合的刀缝,托块的两侧设有与切刀配合让位槽。
9.优选的,所述切刀的上端通过压刀板连接,所述压刀板的上端通过第二气缸与机壳的上端连接,所述切刀的两侧设有压菜板,所述压菜板的上端通过连杆连接,所述切刀上设有与连杆配合的导向槽,压菜板的上端通过下导向杆与压刀板滑动配合,压菜板和压刀板之间连接有弹簧,所述弹簧套在下导向杆的外侧。
10.优选的,所述机壳的上端设有与第二气缸配合的让位口,所述让位口的两侧设有导轨,所述刀具还包括固定第二气缸的移动架,所述移动架的下端设有与导轨配合的滑块,所述移动架上设有轴套,所述压刀板的上端通过上导向杆与轴套配合,机壳的上端设有丝杠,所述丝杠的一端连接有第一电机,所述移动架的下端连接有与丝杠螺纹配合的螺母。
11.优选的,所述上输送带的下方设有同向旋转的下输送带,所述上输送带的末端设有上出料板,所述下输送带的末端设有下出料板,所述后集料箱位于下出料板的下方。
12.优选的,所述下输送带远离后集料箱的一端刮板和滑板,所述刮板贴于上输送带的端部,所述滑板位于下输送带的下方,滑板的下方设有前集料箱。
13.优选的,所述机壳的外侧设有驱动上输送带的第二电机和驱动下输送带的第三电机。
14.优选的,所述机壳的侧壁上设有托架,所述托架上设有可拆卸的上料箱。
15.与现有技术相比,本发明的有益效果是:1、本发明采用由上往下直接对蔬菜进行切割的方式进行破碎,破碎方式类似于人工切菜,不仅避免了蔬菜在机器内的碰撞,而且防止切刀与蔬菜之间的不断摩擦,从而避免了对蔬菜损伤,保证了蔬菜破碎后的质量,刀具采用多个切刀组合的方式,能够单次完成对蔬菜的均匀多段切割,不仅提高了切割速度,而且保证切割长度的均匀性,解决了现有切割装置对蔬菜随意切割,长度与质量无法保证的问题,使用更加可靠。
16.2、本发明在切刀的两侧设置压菜板,通过压菜板模拟人手对切割的蔬菜进行按压定位,防止切割过程中蔬菜移动,让切割更加稳定,提高了破碎质量,压菜板能够沿切刀上下移动,在满足切刀移动的同时,实现了对不同高度的蔬菜的定位;从蔬菜的放置到切割再到最后的出料,蔬菜摆放条理,一直固定在上输送带上,在蔬菜摆放时就能确定对蔬菜的切割角度,保证了最终的破碎质量。
17.3、本发明设置定位板能够对蔬菜的放置位置进行定位,保证蔬菜输送位置的准确性,确保刀具能够对蔬菜进行准确切割。
18.4、本发明设置定长板,通过定长板能够方便使用者判断切割次数,同时限定蔬菜的放置区域,确保刀具能够对蔬菜进行可靠的切割,提高了使用的可靠性。
19.5、本发明的刀具设置了多把切刀,能够单次完成多段切割,加快了切割速度,同时刀具能够进行水平移位完成二次切割,增加了切割范围,提高了破碎效率。
20.6、本发明的定位架能够对蔬菜的两侧进行遮挡限位,防止蔬菜掉落,在托块上设置与刀刃配合的让位槽,保证切割的彻底性,挡板之间设置与切刀配合的刀缝,能够使刀具对相对两块挡板之间的空间进行完全切割,提高了切割范围,确保切割彻底。
附图说明
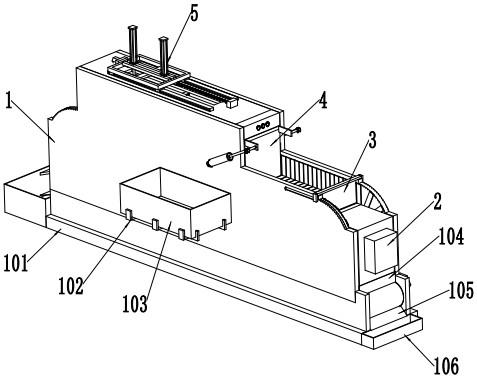
21.图1为本发明的立体结构示意图一;图2为本发明的立体结构示意图二;
图3为本发明的俯视图;图4为图3的a-a剖视图;图5为定长板的结构示意图;图6为定位板的结构示意图;图7为切具的立体结构示意图;图8为切具的主视图;图9为定位架的结构示意图;图10为多个定位架并排设置的结构示意图;图11为刀具与定位架配合的结构示意图。
22.图中:1-机壳;101-底座;102-托架;103-上料箱;104-刮板;105-滑板;106-前集料箱;107-上出料板;108-下出料板;109-后集料箱;110-第一电机;111-丝杠;112-让位口;113-第二电机;114-第三电机;115-滑槽;116-导轨;117-进料口;118-出料口;2-控制器;3-定长板;301-推杆;302-推块;303-移动块;4-定位板;401-转轴;402-推板;403-第一气缸;5-刀具;501-第二气缸;502-移动架;503-滑块;504-压刀板;505-弹簧;506-导向槽;507-下导向杆;508-切刀;509-上导向杆;510-螺母;511-连杆;512-压菜板;513-轴套;6-上输送带;7-定位架;701-托块;702-让位槽;703-挡板;704-刀缝;8-下输送带。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.如图1-2所示,一种用于蔬菜加工的破碎装置,包括机壳1,机壳1的底部设有底座101,机壳1的一端设有进料口117,机壳1的另一端设有出料口118,机壳1内设有用于切割蔬菜的刀具5,如图4所示,机壳1内设有水平设置的上输送带6,上输送带6将蔬菜由进料口117输送至出料口118,上输送带6的外侧壁上并排设置有定位架7,蔬菜的长度方向沿上输送带6的输送方向放置在定位架7内,在进料口117处设有对蔬菜前端定位的定位板4,如图7所示,刀具5包括多把间隔均匀且平行的切刀508,本技术的切刀508设置有10把,相邻切刀508之间的距离为1-2cm,切刀508与机壳1内上、下移动并与定位架7配合,出料口118的下方设有后集料箱109,机壳1的侧壁上设有控制装置的控制器2和开关,在本技术中控制器2采用plc控制,此为设备上常用的控制器,不再详细说明,开关设置在定位板4的上方。
25.其中,在机壳1的外侧设有驱动上输送带6的第二电机113和驱动下输送带8的第三电机114,第二电机113和第三电机114均为伺服电机,能够精准控制输送带的运动距离。
26.在使用时,工作人员条理的将蔬菜放在定位架7内,根据不同的蔬菜形状调整蔬菜的摆放角度,使得蔬菜的一端与定位板4接触,打开开关,在plc的控制下,首先,定位板4旋转使进料口117开启,开启后,上输送带6开始运行,将蔬菜移动至切刀508的下方后停止(运行距离为进料口117至最前端的切刀508之间的距离,最前端的切刀508为靠近出料口118的第一个切刀508),此时切刀508向下移动对蔬菜切割,直接一次将蔬菜切割成长度均匀的小段,切割完毕后切刀508上升,上输送带6旋转半圈,将切刀508的蔬菜输送至后集料箱109
后,输送带停止,此时一个切菜循环完成;再次使用时,重复上述步骤即可。
27.定位板4主要是对蔬菜的前端进行定位,防止蔬菜时,蔬菜的前端顶在定位板4上,从而确保能够将蔬菜准确输送至切刀508的下方,如图6所示,定位板4的上端通过转轴401与机壳1连接,定位板4的侧壁上连接有推板402,推板402和机壳1之间通过第一气缸403连接,通过气缸能够带动定位板4旋转开启。
28.如图9-11所示,定位架7包括托块701,托块701与上输送带6固定并并排贴近设置,托块701的两端设有挡板703,相邻挡板703之间设有与切刀508配合的刀缝704,托块701的两侧设有与切刀508配合让位槽702,确保切刀508能够将蔬菜彻底切断。
29.如图7-8所示,切刀508的上端通过压刀板504连接,压刀板504的上端通过第二气缸501与机壳1的上端连接,在本技术中,为了保证切菜时的稳定性,提高随蔬菜的破碎质量,在切刀508的两侧设有压菜板512,压菜板512位于两块挡板703之间,来模拟人工切菜的动作,压菜板512与人手相同在切菜时能够将蔬菜压住,防止蔬菜移动,压菜板512的上端通过连杆511连接,切刀508上设有与连杆511配合的导向槽506,压菜板512的上端通过下导向杆507与压刀板504滑动配合,压菜板512和压刀板504之间连接有弹簧505,弹簧505套在下导向杆507的外侧。在进行切割时,随着切刀508的下移,压菜板512将蔬菜压住,切刀508继续下压进行切菜,同时压缩弹簧505,切完之后,切刀508在上升的同时能够将压菜板512带起。
30.由于不同的蔬菜长度不同,为了避免单次切割不能完全对蔬菜进行切割,因此将刀具5设置为可移动式,即切割一次上升后,将刀具5进行一次移位后进行再次切割,移位距离为一个刀具5的长度,切割完成后,刀具5复位。
31.刀具5的具体移动结构为:如图3所示,在机壳1的上端设有与第二气缸501配合的让位口112,让位口112的两侧设有导轨116,刀具5还包括固定第二气缸501的移动架502,移动架502的下端设有与导轨116配合的滑块503,移动架502上设有轴套513,压刀板504的上端通过上导向杆509与轴套513配合,机壳1的上端设有丝杠111,丝杠111的一端连接有第一电机110,第一电机110为伺服电机,移动架502的下端连接有与丝杠111螺纹配合的螺母510,通过第一电机110的驱动,实现对刀具5的往复移动。
32.为了确认是否需要刀具5移位进行二次切割,在定位板4的一侧设有定长板3,定长板3位于上输送带6的上端且位于进料口117的外侧,如图5所示,定长板3的上端设有推杆301,推杆301的两端设有推块302,机壳1的侧壁上设有滑槽115,推块302上设有与滑槽115配合的移动块303,将定长板3向定位板4移动,移动至滑槽115的一端,此时定位板4与定长板3之间的距离与整个刀具5的长度相同,此时如果蔬菜能够放入,则只需要一次切割即可,若蔬菜长度超过定位板4与定长板3之间的距离,则需要刀具5的二次切割,定位板4和定长板3之间的最大距离为刀具5长度的两倍,根据定长板3就能轻松进行判断,在机壳1上设置了两个启动开关,一个为一次切割开关,另一个为二次切割开关(即启动后,刀具5一次切割后会移位进行二次切割),在使用时,使用者根据蔬菜的长度选择按下哪一个启动开关即可。
33.另外,针对刀具5能够移位进行二次切割的功能,在使用时,可以将较短的蔬菜前后排列在上输送带6上,即,前端的蔬菜的端部顶在定位板4,后端的蔬菜的一端顶在前端蔬
菜的后端(蔬菜的排列长度不得超过定位板4与定长板3之间的最大距离)这样能够加快对蔬菜的切割速度。
34.切割完成后,上输送带6上会粘附有残留的蔬菜,随上输送带6旋转,为了对粘附的蔬菜进行收集,在上输送带6的下方设有同向旋转的下输送带8,上输送带6的末端设有上出料板107,下输送带8的末端设有下出料板108,后集料箱109位于下出料板108的下方,当粘附的蔬菜随上输送带6移动至上输送带6的下方后会掉落至下输送带8上,通过下输送带8将蔬菜输送至后集料箱109内。
35.为了避免有些菜叶粘在下输送带8上,在下输送带8远离后集料箱109的一端刮板104和滑板105,刮板104贴于上输送带6的端部,滑板105位于下输送带8的下方,滑板105的下方设有前集料箱106,当菜叶随下输送带8移动到刮板104位置处时,刮板104会将菜叶铲掉,在下方滑板105的导向下进入前集料箱106内。
36.在机壳1的侧壁上设有托架102,托架102上设有可拆卸的上料箱103,将带破碎的蔬菜放在上料箱103内,将上料箱103搬至托架102上,从而方便了蔬菜的拿取,根据蔬菜的长度移动定长板3的位置,对于较长的蔬菜需要进行二次切割,对于较短的蔬菜,可以前后排列两行通过二次切割加快破碎速度,放好蔬菜后,根据切割次数启动相应的按钮,此处以二次切割为例进行说明,第一气缸403将定位板4打开后,上输送带6将蔬菜移动至切刀508的下方后停止,此时第二气缸501启动,带动切刀508向下移动对蔬菜进行切割破碎,切刀508从刀缝704内插入直至刀刃位于让位槽702内后将蔬菜彻底切断,然后第二气缸501将刀具5向上拉起,拉起后,第一电机110启动,通过移动架502将刀具5平移一个刀具5的长度后停止,第二气缸501再次启动带动切刀508进行第二次切割,切割完成后,切刀508被拉起,第一电机110带动刀具5复位,然后上输送带6旋转半圈使破碎好的蔬菜落入后集料箱109内,此时完成一个蔬菜破碎过程,再次使用时,重复上述过程。在使用过程中,下输送带8一直旋转。
37.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1