饲料加工用破碎系统的制作方法
1.本实用新型属于饲料加工技术领域,特别涉及适用于饲料加工用的破碎系统。
背景技术:
2.饲料粉碎机主要用于粉碎各种粗饲料,饲料粉碎的目的是增加饲料表面积和调整粒度,增加表面积提高了适口性,且在消化边内易与消化液接触,有利于提高消化率,更好吸收饲料营养成分。使用饲料饲养畜禽时,各种不同的畜禽对颗粒饲料的大小要求不同,特别是雏鸡,需要较小的颗粒,现有的饲料破碎机,基本能够满足对原料的有效破碎,通用性强,但存在以下问题:
3.针对不同的原料,如玉米,大豆等坚硬的物料进行高细度破碎作业时,需要高功率高能耗的破碎机;麦麸,玉米麸质等高纤维的谷物麸质需要比较细碎粉质的粉碎机,现有的饲料破碎机破碎后的颗粒仍含有不达标的大颗粒,需要进行二次破碎或者需要多台破碎机联合工作。
4.总之,现有装置在破碎作业时,经过一次投料很难获得粒度合适的粉碎料,而且容易因为设备之间协调性差,导致现有装置的工作效率不高,设备故障率高。
技术实现要素:
5.为了克服现有技术中存在的现有装置一次投料很难获得粒度合适的粉碎料,需要二次破碎或者需要多台破碎机联合工作的问题,本技术提供了一种饲料加工用破碎系统,使得原料能够一次投料有效破碎,提高破碎工作的效率,降低设备故障率。
6.本技术为了实现上述目的所采用的技术方案是:
7.一种饲料加工用破碎系统,包括装置基座、破碎箱、入料料斗和粉碎箱,所述破碎箱设置在装置基座的上方,所述入料料斗设置在破碎箱上方,所述粉碎箱设置在装置基座的下方,所述粉碎箱与破碎箱连通。
8.进一步地,所述粉碎箱内设置粉碎刀,所述粉碎刀内设置传动杆,所述传动杆贯穿粉碎刀,所述传动杆延伸至粉碎箱的侧壁外,所述粉碎箱的侧壁上设置主动轮和从动轮,所述主动轮与从动轮通过皮带传动,所述主动轮与设置在粉碎箱下方的步进电机的输出轴连接,所述从动轮与传动杆连接。
9.进一步地,所述破碎箱的外壁上设置有伺服电机,所述破碎箱内部设置破碎刀,所述破碎刀通过轴承与破碎箱转动连接,所述破碎刀与伺服电机的输出轴连接。
10.进一步地,所述破碎刀包括主动破碎刀和被动破碎刀,所述主动破碎刀的两端通过轴承与破碎箱转动连接,所述主动破碎刀的一端通过传动轴与伺服电机的输出轴相连;所述被动破碎刀的两端通过轴承与破碎箱转动连接,所述被动破碎刀与主动破碎刀通过齿轮啮合传动,所述被动破碎刀的刀齿与主动破碎刀刀齿相咬合。
11.进一步地,所述破碎箱和入料料斗之间设置破拱防堵装置。
12.进一步地,所述破拱防堵装置包括挡料板、摆臂、调节架、偏心块、卡座和弹簧,所
述偏心块设置在破碎箱的外壁上,所述偏心块与传动轴固定;
13.所述调节架安装在破碎箱的外壁上,所述调节架与破碎箱转动连接,所述调节架的底端与偏心块相接触,所述卡座固定在破碎箱的外壁上,所述卡座与调节架之间设置有弹簧,所述卡座通过弹簧约束调节架的转动;
14.所述摆臂的一端与调节架的顶端连接,所述摆臂延伸至入料料斗内部,所述摆臂的另一端设置有挡料板,所述挡料板设置在入料料斗下料口的上方。
15.进一步地,所述粉碎箱后方设置输料装置,所述输料装置包括:集料槽、输料管、动力风机和储料罐,所述集料槽设置在粉碎箱的下方,所述集料槽与粉碎箱连通,所述集料槽通过输料管与储料罐连通,所述输料管上设置动力风机。
16.进一步地,所述储料罐的下方设置支撑架。
17.与现有技术相比,本技术的有益效果为:
18.(1)通过将饲料倒入储料桶的内部,由储料桶流入破碎箱的内部,打开伺服电机,由第一转轴驱动传动轴转动,在齿轮的传动下驱动主动破碎刀旋转,由破碎刀对饲料进行破碎,破碎后的饲料进入粉碎箱的内部,打开步进电机,步进电机驱动主动轮转动,在皮带的传动下带动从动轮转动,再由传动杆带动粉碎刀转动,对破碎后的饲料再次进行粉碎,实现了对饲料高效的破碎,提高了饲料破碎的效果,同时,避免了需要多台设备联合工作,各设备之间协调性差的问题;
19.(2)通过伺服电机的转动带动传动轴旋转,传动轴带动偏心块转动,由于偏心块的结构特性,偏心块带动调节架的震动,在卡座的支撑下,弹簧对调节架进行弹性支撑,调节架带动摆臂进行摆动,进而由摆臂带动挡料板进行摆动,通过挡料板控制饲料进入破碎箱的量,防止了饲料在破碎箱入料口堆积并造成入料堵塞,增强了装置的可靠性。
20.(3)打开动力风机,在动力风机的带动下,粉碎箱粉碎后的饲料进入集料槽的内部,动力风机将粉碎箱破碎后的粉末状饲料通过输料管送入储料罐的内部,支撑架对储料罐进行支撑,储料罐对粉碎后的饲料进行暂存,需要时将饲料从储料罐底部的出料口排出,实现了对破碎后的饲料便捷的输送。
21.综上所述,本实用新型实现了对饲料高效的破碎,使得原料能够经过一次投料得到有效破碎,提高了破碎工作的效率,降低了设备故障率。
附图说明
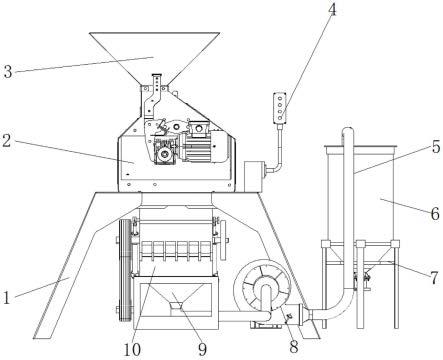
22.图1为本实用新型的正视剖面结构示意图;
23.图2为本实用新型的破碎箱俯视剖面结构示意图;
24.图3为本实用新型的粉碎箱正视剖面结构示意图;
25.图4为本实用新型的破碎箱正视剖面结构示意图;
26.图5为本实用新型的储料桶俯视剖面结构示意图。
27.图中:1-装置基座;2-破碎箱;3-入料料斗;4-控制开关;5-输料管;6-储料罐;7-支撑架;8-动力风机;9-集料槽;10-粉碎箱;11-破碎刀;111-主动破碎刀;112-被动破碎刀;12-伺服电机;13-第一转轴;14-传动轴;15-齿轮;16-粉碎刀;17-传动杆;18-从动轮;19-皮带;20-主动轮;21-第二转轴;22-步进电机;23-挡料板;24-摆臂;25-调节架;26-偏心块;27-卡座;28-弹簧。
具体实施方式
28.现结合附图和实施例对本实用新型的技术方案进行清楚、完整地描述。
29.请参阅图1-5,本实用新型提供的一种实施例:一种饲料加工用破碎系统,包括装置基座1、破碎箱2、入料料斗3、控制开关4、粉碎箱10、集料槽9、输料管5、储料罐6、支撑架7和动力风机8,破碎箱2安装在装置基座1的顶部,且破碎箱2的底部与装置基座1固定,破碎箱2顶端的入料口处安装有入料料斗3,入料料斗3与破碎箱2固定连接,粉碎箱10设置在破碎箱2的下方,并且粉碎箱10与装置基座1固定连接,粉碎箱10与破碎箱2之间连通,粉碎箱10的底端安装有集料槽9,集料槽9与粉碎箱10连通,集料槽10通过输料管5与储料罐6连通,储料罐6的下方设置支撑架7,储料罐6与支撑架7固定连接,输料管5上设置动力风机8,动力风机8的型号为y9-35-11。
30.如图2所示,破碎箱2的外壁上设置有伺服电机12,伺服电机12的型号为hc-sfs102,破碎箱2内部设置破碎刀11,破碎刀11为一组对辊式破碎刀,包括主动破碎刀111和被动破碎刀112,主动破碎刀111和被动破碎刀112均通过轴承与破碎箱2转动连接,主动破碎刀111的一端通过传动轴14与伺服电机12的输出轴相连,进一步地,如图2所示,由于伺服电机12设置的位置与破碎刀11的轴向存在一定角度,伺服电机12的输出端通过第一转轴13与传动轴14连接,更进一步地,为了使电机的传动更加平稳,伺服电机12与第一转轴13之间通过联轴器相连,联轴器具有一定的缓冲减震性能,同时能够对输送电机起到过载保护的作用;主动破碎刀111刀轴的一端设置有第一齿轮,被动破碎刀112刀轴的一端设置第二齿轮,第一齿轮与第二齿轮相互啮合,即被动破碎刀112与主动破碎刀111通过齿轮15啮合传动,被动破碎刀112的刀齿与主动破碎刀111的刀齿相咬合。
31.进一步地,入料料斗3和破碎箱2之间设置破拱装置,结合图4和图5所示,破拱装置包括挡料板23、摆臂24、调节架25、偏心块26、卡座27和弹簧28,偏心块26设置在破碎箱2的外壁上,偏心块26与传动轴14固定;调节架25安装在破碎箱2的外壁上,调节架25与破碎箱2转动连接,调节架25的底端与偏心块26相接触,卡座27固定在破碎箱2的外壁上,卡座27与调节架25之间设置有弹簧28,卡座27通过弹簧28约束调节架25的转动;摆臂24与调节架25的顶端连接,摆臂24延伸至破碎箱2内部,摆臂24另一端的顶端设置有挡料板23,挡料板23设置在入料料斗3下料口的上方,通过挡料板23的摆动控制饲料进入破碎箱的量。
32.如图3所示,粉碎箱10内设置多个粉碎刀16,粉碎刀为圆盘形,粉碎刀16内设置传动杆17,传动杆17贯穿粉碎刀16,多个粉碎刀16在传动杆17的周线方向上均匀分布,传动杆17延伸至粉碎箱10的侧壁外,粉碎箱10的侧壁上设置主动轮20和从动轮18,主动轮20与从动轮18通过皮带19传动,主动轮20与设置在粉碎箱10下方的步进电机22的输出轴连接,从动轮18与传动杆17连接,进一步地,如图3所示,由于步进电机22设置的位置,使得步进电机22输出轴与主动轮20的轴线方向并不一致,因此步进电机22的输出轴通过第二转轴21与主动轮20连接。
33.控制开关4分别与动力风机8、伺服电机12和步进电机22电性连接,通过控制开关4的通断控制动力风机8、伺服电机12及步进电机22的工作。
34.使用时,将原料倒入入料料斗3的内部,由入料料斗3流入破碎箱2的内部,打开伺服电机12,伺服电机12驱动传动轴14转动,传动轴14带动主动破碎刀111转动,在齿轮15的传动下驱动两组破碎刀11相对旋转,从而对物料进行破碎,经过破碎箱2破碎后的饲料进入
粉碎箱10的内部,打开步进电机22,由第二转轴21驱动主动轮20转动,在皮带19的传动下驱动从动轮18转动,由传动杆17驱动粉碎刀16转动,再次对破碎后的饲料进行粉碎,实现了对饲料高效的破碎,提高了饲料破碎的效果,同时,避免了需要多台设备联合工作,各设备之间协调性差的问题;
35.伺服电机12的转动带动传动轴14旋转,传动轴14带动偏心块26转动,由于偏心块26的结构特性,偏心块26带动调节架25震动,在卡座27的支撑下,弹簧28对调节架25进行弹性支撑和复位,约束调节架25的转动,调节架25带动摆臂24进行摆动,进而由摆臂24带动挡料板23进行摆动,通过挡料板23控制饲料进入破碎箱2的量,防止了饲料在破碎箱2入料口堆积并造成入料堵塞,增强了装置的可靠性;
36.打开动力风机8,在动力风机8的带动下,粉碎箱10粉碎后的饲料进入集料槽9的内部,动力风机8将粉碎箱10破碎后的粉末状饲料通过输料管5送入储料罐6的内部,支撑架7对储料罐6进行支撑,储料罐6对粉碎后的饲料进行暂存,需要时将饲料从储料罐6底部的出料口排出进行收集,实现了对破碎后的饲料便捷的输送。
37.综上所述,本实用新型实现了对饲料高效的破碎,能够使得原料经一次投料得到有效破碎,避免了需要多台设备联合工作,设备之间协调性差的问题,提高了破碎工作的效率,降低了设备故障率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1