自动喷涂机器人的制作方法
1.本实用新型涉及工艺摆件生产领域,特别涉及一种自动喷涂机器人。
背景技术:
2.工艺品摆件在我们生活中比较常见,也是集个人爱好及个人品质为一体的物件。工艺品摆件的风格多样,比如喜欢中国文化的,会摆放青花瓷器;喜欢动漫的小伙伴,会摆放手办等。
3.摆件在生产过程中存在喷漆工序,从而给摆件进行上色。现有的摆件喷漆作业通过人工手持喷枪进行上色,人工喷漆上色劳动强度大,大批量进行摆件喷漆作业效率低;且人工大批量给摆件喷漆作业,精准度差,产品质量参差不一,不能满足大批量摆件喷漆作业的需求。故需要提供一种自动喷涂机器人来解决上述技术问题。
技术实现要素:
4.本实用新型提供一种自动喷涂机器人,以解决现有技术中的摆件喷漆作业效率低、精准度差、产品质量参差不一,不能满足大批量生产摆件成品的问题。
5.为解决上述技术问题,本实用新型的技术方案为:一种自动喷涂机器人,其包括:
6.基座,所述基座上设置有防尘罩,所述防尘罩一侧还连接有吸风罩;
7.喷涂平台,设置在所述基座上,用于盛放摆件;
8.喷涂装置,用于对所述喷涂平台上的摆件进行喷涂作业;以及
9.机械臂,与所述基座连接,且所述机械臂与所述喷涂装置可拆卸连接,所述机械臂驱动所述喷涂装置绕所述喷涂平台运动。
10.本实用新型中,所述喷涂平台包括:
11.安装座,用于放置摆件;
12.安装支架,安装座通过安装支架与所述基座转动连接;以及
13.转动电机,设置在所述基座上,所述安装支架与所述转动电机连接,所述转动电机驱动安装支架相对基座转动,从而使得所述安装支架带动所述安装座运动。
14.本实用新型中,所述安装座设置有至少两个,至少两个所述安装座通过安装支架与基座连接,且至少两个安装座以安装支架的转动中心为圆心呈环形阵列分布。
15.本实用新型中,所述机械臂包括:
16.第一转动座,与所述基座连接;
17.第二转动臂,一端与所述第一转动座连接,所述第一转动座驱动所述第二转动壁的转动平面为第二转动平面,所述第二转动平面与喷涂平台所在平面垂直;
18.第三转动臂,一端与第二转动臂连接,所述第三转动臂另一端与第二转动座连接,以第三转动臂的转动平面为第三转动平面,所述第三转动平面与第二转动平面垂直;以及
19.第二转动座,与第三转动臂另一端转动连接,第二转动座转动平面为与第三转动平面相互垂直,所述第二转动座与所述喷涂装置连接,所述第二转动座驱动喷涂装置绕所
述第二转动座的轴线为中心转动。
20.本实用新型中,所述喷涂装置包括:
21.喷枪,
22.手臂枪架杆,用于与对应的机械臂连接;以及
23.夹具组件,将所述喷枪与所述手臂枪架杆连接;
24.其中,所述夹具组件包括:
25.中间搭接块,一侧与所述喷枪连接,另一侧与所述手臂枪架杆可拆卸连接;以及
26.喷枪夹具,设置在所述中间搭接块顶端,所述喷枪夹具与所述中间搭接块可拆卸连接,所述喷枪夹具上连接有检测器,所述检测器用于检测所述喷枪的运动轨迹。
27.本实用新型中,所述中间搭接块包括:
28.连接部,竖直设置在所述中间搭接块一侧,所述连接部一侧与所述喷枪连接所述连接部顶端设置有第一插孔,所述第一插孔与所述喷枪夹具插接;以及
29.支撑部,所述支撑部顶端一侧与所述连接部底端连接,所述支撑部顶端另一侧位于所述手臂枪架杆底端,所述支撑部上设置有第二插头,所述第二插头与所述手臂枪架杆插接。
30.本实用新型中,所述喷枪夹具包括:
31.固定杆,竖直设置,所述固定杆顶端与所述检测器连接,所述固定杆底端设置有第一插头,所述第一插头与所述第一插孔插接;以及
32.抓取杆,设置在所述固定杆一侧,用于手持抓取喷枪夹具。
33.本实用新型中,所述中间搭接块侧壁上设置有第一固定孔,所述第一固定孔与所述第一插孔连通;
34.所述第一插头上设置有第一限位孔,所述喷涂装置还包括第一连接件,所述第一连接件贯穿所述第一固定孔并延伸至所述第一插孔内,从而限定所述喷枪夹具与所述中间搭接块的位置。
35.本实用新型中,所述第一固定孔设置有两组,所述第一连接件包括第一固定段以及相对设置在第一固定段两端的第一插接段,两组第一插接段长边所在直线与第一固定段长边所在直线交叉,两组所述第一插接段分别于两组第一固定孔插接。
36.本实用新型中,所述第一插头包括:
37.第一限位端,与固定杆底端连接,所述第一限位端与所述中间搭接块顶面接触,所述第一限位端限定所述第一插头与所述第一插孔的插接位置;
38.第一插接端,与所述第一插孔插接;以及
39.第一连接段,将所述第一插接端以及第一限位端连接,所述第一限位孔设置在所述第一连接段。
40.本实用新型相较于现有技术,其有益效果为:本实用新型的自动喷涂机器人通过喷涂平台承载待喷涂的摆件;机械臂带动喷涂装置相对喷涂平台运动,从而使得喷涂装置对摆件进行喷漆作业。自动喷涂机器人机械化喷涂作业,自动化生产效率高;机械化喷涂操作的精准度高,且设备可大批量进行摆件喷涂作业,提升了摆件喷漆的成品率以及良品率。此外,基座上设置有防尘罩,所述防尘罩一侧连接有抽风罩,避免摆件自动喷漆作业中的灰尘等杂质干扰,进一步提升其摆件成品质量。
附图说明
41.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面对实施例中所需要使用的附图作简单的介绍,下面描述中的附图仅为本实用新型的部分实施例相应的附图。
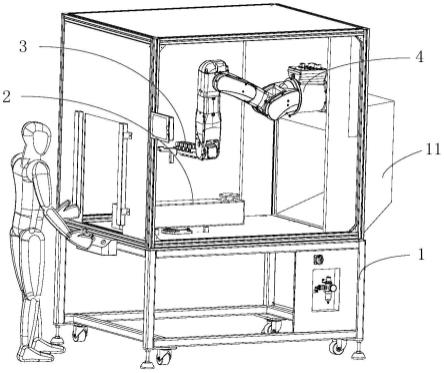
42.图1为本实用新型的优选实施例的整体结构示意图。
43.图2为本实用新型的优选实施例的内部结构示意图。
44.图3为本实用新型的优选实施例的喷涂装置结构示图。
45.图4为本实用新型的优选实施例的喷涂装置爆炸图。
46.图5为本实用新型的优选实施例的中间搭接块结构示意图。
47.图6为本实用新型的优选实施例的喷枪夹具结构示意图。
48.图7为本实用新型的优选实施例的喷枪夹具与中间搭接块连接处截面图。
49.图8为本实用新型的优选实施例的手臂枪架杆与中间搭接块连接处截面图。
50.图9为本实用新型的优选实施例的喷涂装置使用状态图。
51.附图标记:基座1、抽风罩11、喷涂平台2、第一安装座21、第二安装座22、安装支架23、转动电机24、喷涂装置3、喷枪31、手臂枪架杆32、连接块321、第二插孔322、第二固定孔323、第一连接件33、第二连接件34、中间搭接块35、连接部351、第一插孔3511、第一固定孔3512、支撑部352、第二插头3521、第二插接端3521a、第二连接段3521b、第二连接孔3521c、第三固定孔3523、喷枪夹具36、固定杆361、第一插头3611、第一插接端3611a、第一限位端3611b、第一连接段3611c、第一连接孔3611d、第三插头3612、抓取杆362、机械臂4、第一转动座41、第二转动臂42、第三转动臂43、第二转动座44、转动圆盘441、避让缺口4411。
具体实施方式
52.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
53.在图中,结构相似的单元是以相同标号表示。
54.本实用新型术语中的“第一”“第二”等词仅作为描述目的,而不能理解为指示或暗示相对的重要性,以及不作为对先后顺序的限制。
55.请参照图1、图2和图3,其中图1为本实用新型的优选实施例的整体结构示意图。图2为本实用新型的优选实施例的内部结构示意图。图3为本实用新型的优选实施例的喷涂装置结构示图。
56.如下为本实用新型提供的一种能解决以上技术问题的自动喷涂机器人的优选实施例。本实用新型提供的自动喷涂机器人的优选实施例为:一种自动喷涂机器人,用于给摆件喷漆;其包括基座1、喷涂平台2、喷涂装置3以及机械臂 4;本实施例中的喷涂平台2设置在基座1上,用于支撑固定摆件,从而便于进行喷漆作业。喷涂装置3通过机械臂4与基座1连接,机械臂4带动喷涂装置 3进行全方位喷涂作业,实现摆件的全自动化喷漆,提升摆件喷漆作业的成品效率,且自动化喷漆作业提升了成品良率。
57.本实用新型中的喷涂装置3包括喷枪31、手臂枪架杆32以及夹具组件;手臂枪架杆
32与对应的机械臂4连接,本实施例中的手臂枪架杆32与机械臂 4上的第二转动座44连接。夹具组件将喷枪31与手臂枪架杆32连接;优选的,本实施例中的夹具组件分别与喷枪31以及手臂枪架杆32均可拆卸连接,且夹具组件上还连接有检测器,检测器用于检测喷枪31的运动轨迹。
58.此外,本实施例中的基座1上设置有防尘罩,防尘罩1一侧连接有抽风罩 11;基座1上设置有防尘罩以及抽风罩11,抽风罩11用于吸附喷涂过程中的回程等杂质,提升了喷涂成品质量。本实施例中的基座1底端还设置有万向轮,便于设备移动,结构实用性强。
59.本实用新型中的自动喷涂机器人通过喷涂平台承载待喷涂的摆件;机械臂带动喷涂装置相对喷涂平台运动,从而使得喷涂装置对摆件进行喷漆作业。自动喷涂机器人机械化喷涂作业,喷涂操作的精准度高,且设备可大批量进行摆件喷涂作业,提升了摆件喷漆的成品率以及良品率。此外,基座上设置有防尘罩,防尘罩一侧连接有抽风罩,避免摆件自动喷漆作业中的灰尘等杂质干扰,进一步提升其摆件成品质量。
60.结合图2,如下对本实施例中的喷涂平台2结构进行阐述:
61.本实施例中的喷涂平台2包括安装座、安装支架23以及转动电机24。安装座用于支撑摆件,安装支架23与基座1转动连接,且安装座设置在安装支架 23上。转动电机24与安装支架23连接,转动电机24驱动安装支架23相对基座1顶面转动,从而使得安装支架23带动安装座运动。安装座在运动轨迹上包括上料位、喷涂位以及下料位。设备可以自动输送摆件到工作位,提升设备的生产效率。
62.此外,本实用新型中的安装座至少设置有两个。至少两个安装座通过安装支架23与基座1连接,安装支架23与基座1转动连接。且至少两个安装座以安装支架23的转动中心为圆心,呈环形阵列分布。此结构设计精简,节省了人工上摆件料的时间,在摆件在喷涂作业时,工作人员可将喷涂成品进行下料。提升了自动喷涂机器人输送摆件的效率,从而大大提升了自动喷涂机器人的成品率。
63.优选的,本实施例中的安装座的运动轨迹上上料位以及下料位重叠,且安装座优选设置有两个,两个安装座分别为第一安装座21以及第二安装座22。当第一安装座21位于上料位时,工作人员上料第一摆件。其次,第一安装座 21运动到喷涂位时,喷涂装置3对第一摆件进行喷涂作业;同时,第二安装座 22位于上料位,工作人员上料第二摆件。然后,第一摆件喷涂完成,第一安装座21带动第一喷涂成品从喷涂位运动到下料位,工作人员将第一喷涂成品下料,并上料第三摆件,准备喷涂作业;此时第二安装座22带动第二摆件从上料位运动到下料位进行喷涂作业。
64.结合图2对本实施例中的机械臂4结构进行详细阐述:
65.本实施例中的机械臂4结构包括第一转动座41、第二转动臂42、第三转动臂43以及第二转动座44。其中第一转动座41与基座1连接,第二转动臂42 与第一转动座41转动连接;以第一转动座41驱动第二转动臂42转动平面为第二转动平面,本实施例中的第二转动平面与喷涂平台2所在平面垂直。
66.本实施例中的第三转动臂43一端与第二转动臂42连接,第三转动臂43 另一端与第二转动座44连接;其中,第三转动臂43的转动平面为第三转动平面,其中第三转动平面与第二转动平面垂直。
67.第二转动座44与第三转动臂43另一端转动连接,第二转动座44转动平面为与第三
转动平面相互垂直。本实施例中的第二转动座44与喷涂装置3连接,且第二转动座44驱动喷涂装置3转动,第二转动座44驱动喷涂装置3绕第二转动座44的轴线为中心转动。本实用新型中的机械臂4结构确定喷涂装置3 可全方位喷涂,提升喷涂设备的实用性。
68.本实用新型中的第三转动臂43设置有若干组,若干组第三转动臂43首尾转动连接,从而延长机械臂4的长度,提升设备的喷涂范围,提升设备结构的实用性。
69.结合图3-图7,如下对本实用新型中的喷涂装置3结构进行详细阐述:
70.夹具组件包括中间搭接块35以及喷枪夹具36;其中,中间搭接块35一侧与喷枪31连接,另一侧与手臂枪架杆32可拆卸连接;喷枪夹具36设置在中间搭接块35顶端,喷枪夹具36与中间搭接块35可拆卸连接,喷枪夹具36上连接有检测器,检测器用于检测喷枪31的运动轨迹。喷枪31与通过夹具组件与手臂枪架杆32可拆卸连接。
71.优选的,本实施例中的中间搭接块35一侧与喷枪31连接,中间搭接块35 另一侧通过第一连接件33与手臂枪架杆32可拆卸连接。喷枪夹具36设置在中间搭接块35顶端,喷枪夹具36与中间搭接块35通过第二连接件34可拆卸连接。
72.喷枪夹具36上连接有检测器,检测器用于检测喷枪31的运动轨迹。喷枪 31与通过夹具组件与手臂枪架杆32可拆卸连接,便于喷涂设备定位设定摆件的喷涂轨迹,结构实用性强。
73.结合图5,对本实施例中的中间搭接块35结构进行详细阐述:
74.本实施例中的中间搭接块35顶端设置有第一插孔3511,第一插孔3511用于与喷枪夹具36插接;中间搭接块35侧壁上设置有第一固定孔3512,第一固定孔3512与第一插孔3511联通,第一连接件33贯穿第一固定孔3512并延伸至第一插孔3511内,从而限定喷枪夹具36与中间搭接块35的位置。
75.本实施例中的中间搭接块35包括连接部351以及支撑部352;连接部351 竖直设置在中间搭接块35一侧,连接部351顶端设置有第一插孔3511;连接部351竖直设置在中间搭接块35一侧,连接部351一侧与喷枪31连接。连接部351顶端设置有第一插孔3511,第一插孔3511与喷枪夹具36插接。支撑部 352顶端一侧与连接部351底端连接,支撑部352顶端另一侧位于手臂枪架杆 32底端,支撑部352上设置有第二插头3521,第二插头3521与手臂枪架杆32 插接。
76.支撑部352设置在中间搭接块35底端,且支撑部352顶端一侧与连接部 351底端连接。支撑部352设置在手臂枪架杆32底端,支撑部352顶端另一侧设置有第二插头3521,第二插头3521与手臂枪架杆32插接。
77.本实施例中的第二插头3521结构进行阐述:
78.本实施例中的第二插头3521包括第二插接端3521a以及第二连接段 3521b,第二插接端3521a通过第二连接段3521b与支撑部352连接;其中第二连接段3521b的宽度小于第二插接端3521a的宽度。本实施例中的第二插接端 3521a宽度小于支撑部352宽度。且第二连接段3521b、第二插接端3521a以及支撑部352之间形成第二连接孔3521c。第二连接孔3521c与第二连接件34插接,提升结构的稳定性。
79.此外,本实施例中的支撑部352还设置有第三固定孔3523,第三固定孔3523 贯穿支撑部352。第三固定孔3523通过螺钉与喷枪31可拆卸连接,结构实用性强。
80.结合图6和图7,对本实施例中的喷枪夹具36结构进行详细阐述:
81.本实施例中的喷枪夹具36包括固定杆361以及抓取杆362;固定杆361竖直设置,固定杆361顶端与检测器连接,固定杆361底端设置有第一插头3611,第一插头3611与第一插孔3511插接;抓取杆362设置在固定杆361一侧,抓取杆362用于手持抓取喷枪夹具36。本实施例中固定杆361竖直设置在中间搭接块35上方,固定杆361顶端与检测器连接,固定杆361底端与中间搭接块35可拆卸连接。本实施例中的方位如图3所标注。
82.中间搭接块35侧壁上设置有第一固定孔3512,第一固定孔3512与第一插孔3511联通;第一插头3611上设置有第一限位孔,喷涂装置3还包括第一连接件33,第一连接件33贯穿第一固定孔3512并延伸至第一插孔3511内,从而限定喷枪夹具36与中间搭接块35的位置。
83.本实用新型中的固定杆361一端设置有第一插头3611,第一插头3611上设置有第一连接孔3611d;第一连接孔3611d用于与第一连接件33插接,从而限定喷枪夹具36与中间搭接块35的位置,提升结构的稳定性,避免喷枪夹具 36掉落。
84.本实施例中的第一插头3611包括第一插接端3611a、第一限位端3611b以及第一连接段3611c,第一限位端3611b与固定杆361一端连接,且第一插接端3611a通过第一连接段3611c与第一限位端3611b连接。第一限位端3611b 与固定杆361底端连接,第一限位端3611b与中间搭接块35顶面接触,第一限位端3611b限定第一插头3611与第一插孔3511的插接位置;第一插接端3611a 与第一插孔3511插接;第一连接段3611c,将第一插接端3611a以及第一限位端3611b连接,第一限位孔设置在第一连接段3611c。
85.本实施例中的第一插接端3611a以及第一限位端3611b的宽度均大于第一连接段3611c的宽度,在第一插接端3611a、第一限位端3611b以及第一连接段3611c之间形成第一连接孔3611d。第一连接孔3611d与第一连接件33插接,提升固定杆361与中间搭接块35之间连接的稳定性。
86.进一步的,本实施例中的第一插接端3611a宽度小于第一限位端3611b的宽度,优选的第一限位端3611b的宽度大于第一插孔3511的宽度,从而使得第一限位端3611b限定第一插头3611与第一插孔3511插接位置,进一步提升结构的稳定性。
87.本实施例中的固定杆361另一端还设置有第三插头3612,第三插头3612 用于装配检测器,该检测器用于记录喷枪31的喷涂轨迹。
88.结合图3、图4、图5和图8,对本实施例中的手臂枪架杆结构进行详细阐述:
89.本实施中的机械臂4包括转动圆盘441,其中转动圆盘441周侧设置有避让缺口4411。本实施例中的手臂枪架杆32为长条结构,手臂枪架杆32一端设置有连接块321,本实施例中的连接块321转动圆盘441通过螺栓连接,且连接块321与对应的避让缺口4411卡接。此结构设计精简,有效提升机械臂4 与喷涂装置3连接的稳定性,避免喷涂装置3与机械臂4连接处的误差,提升自动喷涂机器人喷涂操作的精准性。
90.本实用新型中的手臂枪架杆32底端设置有与第二插头3521插接的第二插孔322,本实施例中的第二插孔322设置有若干组,若干组第二插孔322沿手臂枪架杆32轴向设置,从而使得本实施例中的喷涂装置3可同时装配若干组喷枪31,提升喷涂机器人的实用性,提升喷涂作业的喷涂效率,结构实用性强。
91.第二插头3521包括第二插接端3521a以及第二连接段3521b,第二插接端 3521a通过第二连接段3521b与支撑部352连接,第二连接段3521b设置有第二连接孔3521c;手臂枪
架杆32侧壁还设置有第二固定孔323,第二固定孔323 与第二连接孔3521c位置对应,第二固定孔323与第二插孔322连通,涂喷装置还包括第二连接件34;第二连接件34将第二固定孔323以及第二固定孔323 进行插接,从而限定手臂枪架杆32与第二插头3521的连接位置。
92.手臂枪架杆32侧边还设置有第二固定孔323,第二固定孔323与第二插孔 322连通,第二连接件34将第二连接孔3521c以及第二固定孔323进行连接,从而提升第二插头3521与手臂枪架杆32之间连接的稳定性。
93.结合图3和图4,对本实施例中的第一连接件33结构进行阐述:
94.本实施例中的第一连接件33为u字形结构,第一固定孔3512设置有两组,第一连接件33包括第一固定段以及相对设置在第一固定段两端的第一插接段,两组第一插接段长边所在直线与第一固定段长边所在直线交叉,两组第一插接段分别于两个第一固定孔3512插接。第一固定段限定第一连接件33的插接位置,提升第一连接件33将手臂枪架杆32以及喷枪夹具36连接的稳定性。
95.此外,本实施例中的第一连接件33可设置为弹性件,且两组第一插接段相对靠近,从而夹持喷枪夹具36,提升喷涂装置3结构的稳定性。
96.优选的,本实施例中的第一连接件33位于手臂枪架杆32上方,第一连接件33还限定手臂枪架杆32的位置,提升喷涂装置3结构的紧凑性以及稳定性。
97.本实施例中的第二连接件34结构与本实施例中第一连接件33的结构相同,本实施例中的第二固定孔323设置有两组。本实施例中的第二连接件34为u 字形结构,第二固定孔323设置有两组,第二连接件34包括第二固定段以及相对设置在第二固定段两端的第二插接段,两组第二插接段长边所在直线与第二固定段长边所在直线交叉,两组第二插接段分别于两个第二固定孔323插接。第二固定段限定第二连接件34的插接位置,提升第二连接件34将手臂枪架杆 32以及中间搭接块35连接的稳定性。
98.本实用新型的工作原理:
99.一、将喷枪31与夹具组件连接。
100.1)喷枪31与中间搭接块35连接:本实施例中的喷枪31一侧设置有固定槽,中间搭接块35的支撑部352设置有第三固定孔3523,螺钉贯穿第三固定孔3523与固定槽连接,从而实现喷枪31与中间搭接块35的装配。
101.需要更换不同颜料的喷枪31时,则需要通过拆卸螺钉将喷枪31与中间搭接块35进行拆解,结构精简实用,便于操作。
102.2)中间搭接块35与喷枪夹具36插接:本实施例中的中间搭接块35顶端设置有第一插孔3511,喷枪夹具36一端的第一插头3611与第一插孔3511插接,第一插头3611上的第一限位端3611b提升第一插头3611与第一插孔3511 的插接位置,便于使用者装配喷枪夹具36。
103.第一插头3611与第一插孔3511插接到位后,第一固定孔3512与第一插头 3611上的第一连接孔3611d连通;然后将插接安装第二连接件34,第二连接件 34将第一固定孔3512以及第一连接孔3611d插接限位,避免喷枪夹具36易脱落的稳定。
104.二、人工手持喷枪夹具36进行手动喷涂作业。
105.首先,将本实施例中的喷枪夹具36的固定杆361上的第三插头3612安装检测器,然后通过人工手持抓取杆362对安装平台上的摆件进行手工喷涂,如图9所示,检测器记录人
工喷涂摆件的轨迹。
106.三、喷涂装置3与机械臂4连接。
107.1),将手臂枪架杆32与机械臂4上的转动圆盘441安装,其中转动圆盘 441周侧设置有避让缺口4411。本实施例中的手臂枪架杆32为长条结构,手臂枪架杆32一端设置有连接块321,本实施例中的连接块321转动圆盘441通过螺栓连接,且连接块321与对应的避让缺口4411卡接。此结构设计精简,有效提升机械臂4与喷涂装置3连接的稳定性,避免喷涂装置3与机械臂4连接处的误差,提升自动喷涂机器人喷涂操作的精准性。
108.2)将喷枪夹具36与中间搭接块35拆卸,然后将中间搭接块35与手臂枪架杆32连接。其中手臂枪架杆32底端设置有第二插孔322,中间搭接块35上的第二插头3521与第二插孔322插接。
109.3)第二连接件34将插接到位的第二插头3521以及第二插孔322进行连接,从而限定中间搭接块35与手臂枪架杆32的连接位置,从而提升结构的稳定性,避免结构松散掉落。
110.本实用新型中,第二插孔322设置有若干组,若干组第二插孔322沿手臂枪架杆32轴向设置,从而使得本实施例中的喷涂装置3可同时装配若干组喷枪 31组件,从而可装配多种颜色的喷枪31,提升喷涂机器人的实用性,提升喷涂作业的喷涂效率,结构实用性强。
111.中间搭接块35与手臂枪架杆32连接后,喷枪夹具36与中间搭接块35的第一插孔3511插接,然后通过第一连接件33将喷枪夹具36以及中间搭接块 35进行固定,使得喷涂装置3装配完成。
112.本实施例中,装配完成的喷涂装置3结构中,第一连接件33位于手臂枪架杆32上方,第一连接件33还限定手臂枪架杆32的位置,提升喷涂装置结构的紧凑性以及稳定性。
113.四、喷涂装置3与机械臂4组装后,检测器将检测的人工喷涂轨迹反馈给基座1中的中央处理器,然后中央处理器驱动机械臂4对位于喷涂平台2上的摆件进行喷涂。
114.本实用新型中的安装座至少设置有两个。至少两个安装座通过安装支架23 与基座1连接,安装支架23与基座1转动连接。且至少以安装支架23的转动中心为圆心,呈环形阵列分布。此结构设计精简,节省了人工上摆件料的时间,在摆件在喷涂作业时,工作人员可将喷涂成品进行下料。提升了自动喷涂机器人输送摆件的效率,从而大大提升了自动喷涂机器人的成品率。
115.优选的,本实施例中的安装座的运动轨迹上上料位以及下料位重叠,且安装座优选设置有两个,两个安装座分别为第一安装座21以及第二安装座22。
116.1)第一安装座21位于上料位时,工作人员上料第一摆件。
117.2)第一安装座21运动到喷涂位时,喷涂装置3对第一摆件进行喷涂作业;同时,第二安装座22位于上料位,工作人员上料第二摆件。
118.3)第一摆件喷涂完成,第一安装座21带动第一喷涂成品从喷涂位运动到下料位,工作人员将第一喷涂成品下料,并上料第三摆件,准备喷涂作业;此时第二安装座22带动第二摆件从上料位运动到下料位进行喷涂作业。
119.这样即完成了本优选实施例的自动喷涂机器人的使用过程。
120.综上,虽然本实用新型已以优选实施例揭露如上,但上述优选实施例并非用以限制本实用新型,本领域的普通技术人员,在不脱离本实用新型的精神和范围内,均可作各种更动与润饰,因此本实用新型的保护范围以权利要求界定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1