一种用于智能配肥机提升混合于一体的装置的制作方法
1.本实用新型涉及一种用于智能配肥机提升混合于一体的装置,使用于智能配肥机。
背景技术:
2.目前国内智能配肥机领域每小时产能达到10-15吨以上的设备,一般体积都过于庞大,为了实现这个产能,要么把设备加长,要么把设备加高,但很多购买智能配肥机的客户厂房面积或厂房高度受限,都希望能购买到体积小巧,产能较大的设备。
3.因此,迫切希望开发一种集提升混合于一体的装置,在确保产能足够大的情况下,能够极大的缩小智能配肥机外形尺寸,满足客户需求。
技术实现要素:
4.本实用新型的目的提供一种用于智能配肥机提升混合于一体的装置,可实现提升混合在同一个斗内进行,从而有效地缩小智能配肥机外形尺寸,满足客户需求。
5.为解决上述技术问题,本实用新型的技术方案为:
6.一种用于智能配肥机提升混合于一体的装置,由提升结构和搅拌结构组成,所述提升结构为现有结构,包括龙门架、料斗、两根钢丝绳、两个液压油缸、两个传感器,料斗安装在龙门架内,料斗上安装有四个导向轮能使料斗在龙门架内上下移动;两个液压油缸安装在龙门架的横梁上,两根钢丝绳分别与料斗两侧相连,智能配肥机的控制系统控制两个液压油缸伸缩,使液压油缸与钢丝绳完成料斗的提升或下降,龙门架顶部和底部各安装有一个传感器,用于检测料斗位置;其特征在于:所述搅拌结构由搅拌桨、固定框架、气缸、搅拌电机、活动框架、联轴器凸端、顶杆、两个轴承、联轴器凹端、定位圈、翻板定位机构组成,固定框架安装在龙门架一侧,搅拌桨通过两个轴承固定在料斗上,搅拌桨可以沿轴心在料斗内做圆周运动;搅拌桨一端连接联轴器凹端,联轴器凹端上焊接着一个带孔的定位圈,定位圈正上方安装着一套翻板定位机构,翻板定位机构由固定支架、两根弹簧和一个翻板组成,固定支架安装在料斗上,固定支架上安装有两根弹簧,两根弹簧另一端与翻板两端相连,翻板上固定有两个定位销,定位销能插入定位圈的孔内;搅拌电机安装在活动框架内,活动框架安装在固定框架内,且能在固定框架内活动,活动框架和固定框架之间安装有一个气缸,通过气缸的运动可以实现搅拌电机前进和后退;搅拌电机输出轴上安装有联轴器凸端,联轴器凸端与联轴器凹端能相互吻合;顶杆安装在活动框架上;气缸和搅拌电机均由智能配肥机的控制系统控制。
7.所述联轴器凹端设有通孔,所述联轴器凸端上安装有突出的销钉,且销钉正好插入通孔。
8.所述联轴器凹端设有通孔数量为3-5个,通孔直径为16-31mm,所述联轴器凸端的销钉数量为3-5个,销钉直径为15-30mm,长度为50mm。
9.所述联轴器凹端和联轴器凸端材质均为金属,所述销钉材质为不锈钢,销钉顶端
为球形。
10.所述定位圈上有定位孔,定位孔直径为5-10mm,数量为30-50个,定位圈厚度为3-5mm,材质为304不锈钢材质。
11.所述定位销的直径为4-9mm,长度为20mm,顶部为球形,材质为模具钢。
12.所述弹簧长度为40-60mm,直径在1.5-2.0mm,材质为304不锈钢材质。
13.所述活动框架八个角上各安装有一个导向轮,每个导向轮嵌入固定框架的导向槽内,通过气缸的伸缩运动可以实现活动框架的前进或后退动作。
14.所述的龙门架底部安装有限位机构,所述限位机构由四个马蹄形钢板、四根钢棒和四根立柱组成,四个马蹄形钢板分别对称地焊接在料斗左右侧板上,四根立柱分别焊接在龙门架上,四根钢棒分别焊接在四根立柱上,且每根立柱对应一个马蹄形钢板,当料斗移动到龙门架底部时,焊接在料斗左右两侧的四块马蹄形钢板缺口分别落在四根钢棒上,从而在料斗搅拌时,限制料斗移动。当料斗在龙门架底部时,落入限位机构内,当搅拌电机对位完成进行搅拌时,料斗不会移动。
15.所述马蹄形钢板厚度为20-30mm,钢棒直径为25-35mm。
16.使用本实用新型时,智能配肥机控制系统接通电源,设备初始状态,料斗在龙门架底部,翻板上的定位销插入联轴器凹端定位圈孔内,搅拌桨无法转动,气缸处于收回状态,联轴器凸端和联轴器凹端处于分离状态。设备工作时,肥料进入料斗,气缸活塞杆伸出,带动活动框架向左移动,由于搅拌电机固定在活动框架上,从而带动搅拌电机向左移动,当移动到活动框架上的顶杆顶到翻板时,翻板上的定位销从定位圈内移除,同时联轴器凸端上的销钉插入联轴器凹端的通孔内,当联轴器对位完成后,搅拌电机开始转动,通过联轴器带动搅拌桨进行转动,对料斗内肥料进行搅拌,当设定的搅拌时间到达后,搅拌电机停止运行,气缸活塞杆收回,联轴器凸端和联轴器凹端分开,同时顶杆也从翻板上移开,翻板在弹簧作用下,翻板上的定位销插入定位圈内,确保料斗在上升和下降过程中,搅拌桨的角度不发生变化,从而保证在下次联轴器对位过程中能顺利插入。智能配肥机上的液压油缸对料斗上的钢绳进行提升,料斗在龙门架轨道内向上运行,当运行到龙门架顶部,感应器检测到信号后,料斗停止上升,将斗内肥料全部倒入智能配肥机缓冲仓内后,料斗开始下降,当料斗运行到龙门架底部,底部感应器检测到信号后,料斗停止运行,如此周而复始。
17.本实用新型具有现场使用安全性高、设计简单、便于操作、维修方便,稳定性好等特点。
附图说明
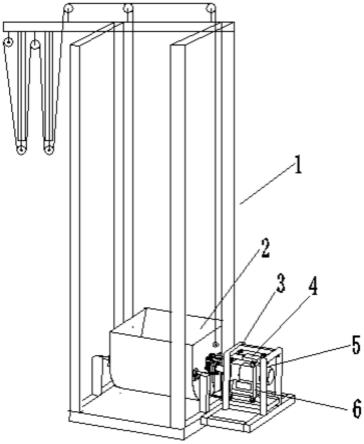
18.图1为本实用新型的结构示意图。
19.图2为本实用新型的搅拌电机与搅拌桨安装示意图。
20.图3为本实用新型的翻板定位机构安装示意图。
21.图4为本实用新型的限位结构示意图。
具体实施方式
22.结构附图对本实用新型作进一步的描述。
23.如图1、图2、图3所示,一种用于智能配肥机提升混合于一体的装置,由提升结构和
搅拌结构组成,所述提升结构为现有结构,包括龙门架1、料斗2、两根钢丝绳、五个定滑轮、两个液压油缸、两个动滑轮、两个传感器,料斗2安装在龙门架1内,料斗2上安装有四个导向轮,四个导向轮分别嵌入龙门架1四根立柱并能沿立柱上下移动,使料斗2只能在龙门架1内上下移动;五个定滑轮、两个液压油缸分别安装在龙门架1的横梁上,两根钢丝绳分别与料斗2两侧相连,智能配肥机的控制系统控制两个液压油缸伸缩,使液压油缸与钢丝绳完成料斗2的提升或下降,龙门架1顶部和底部各安装有一个传感器,用于检测料斗2位置;其特征在于:所述搅拌结构由搅拌桨11、固定框架3、气缸4、搅拌电机5、活动框架6、联轴器凸端9、顶杆19、两个轴承7、12、联轴器凹端8、定位圈10、翻板定位机构组成,固定框架3安装在龙门架1一侧,搅拌桨11通过两个轴承(7、12)固定在料斗2上,搅拌桨11可以沿轴心在料斗2内做圆周运动;搅拌桨11一端连接联轴器凹端8,联轴器凹端8上焊接着一个带孔的定位圈10,定位圈10正上方安装着一套翻板定位机构,翻板定位机构由固定支架14、两根弹簧(16、18)和一个翻板17组成,该机构固定支架14安装在料斗2上,固定支架14上安装有两根弹簧(16、18),两根弹簧(16、18)另一端与翻板17两端相连,翻板17上固定有两个定位销,定位销能插入定位圈10的孔内;搅拌电机5安装在活动框架6内,活动框架6八个角上各安装有一个导向轮,每个导向轮嵌入固定框架3的导向槽内,活动框架6通过八个导向轮安装在固定框架3内,通过气缸4的伸缩运动可以实现活动框架6的前进或后退动作;活动框架6和固定框架3之间安装有一个气缸4,通过气缸4的运动可以实现搅拌电机5前进和后退;搅拌电机5输出轴上安装有联轴器凸端9,联轴器凸端9与联轴器凹端8能相互吻合;顶杆19安装在活动框架6上;气缸4和搅拌电机5均由智能配肥机的控制系统控制;联轴器凸端9上安装有突出的销钉,销钉数量为3-5个之间,销钉直径为15-30mm之间,长度为50mm,联轴器凸端9材质为金属材质,能传递较大扭矩;销钉材质为不锈钢材质,销钉顶端为球形;联轴器凹端8设有通孔,通孔数量为3-5个之间,通孔直径为16-31mm之间,材质为金属材质,耐腐蚀的金属材质更好,,且联轴器凸端9销钉正好插入联轴器凹端8的通孔。定位圈10上有定位孔,定位孔直径为5-10mm之间,数量为30-50个之间,定位圈10厚度为3-5mm之间,材质为304不锈钢材质。翻板17上安装有两个定位销,直径为4-9mm之间,长度为20mm,顶部为球形,材质为模具钢,通过翻板17及两个弹簧(16、18)可以将定位销插入定位圈10上的孔中。弹簧16、18长度为40-60mm之间,直径在1.5-2.0mm之间,数量为2个,材质为304不锈钢材质。
24.如图4所示,龙门架1底部安装有限位机构,所述限位机构由四个马蹄形钢板20、四根钢棒21和四根立柱22组成,每块马蹄形钢板厚度为30mm,钢棒直径为25mm,四个马蹄形钢板20分别对称地焊接在料斗2左右侧板上,四根立柱22分别焊接在龙门架1上,四根钢棒21分别焊接在四根立柱22上,且每根立柱22对应一个马蹄形钢板20,当料斗2移动到龙门架1底部时,焊接在料斗2左右两侧的四块马蹄形钢板缺口分别落在四根钢棒21上,从而在料斗2搅拌时,限制料斗2移动。当料斗2在龙门架1底部时,落入限位机构内,当搅拌电机5对位完成进行搅拌时,料斗2不会移动。智能配肥机的控制系统为现有,包括控制箱、plc、电磁阀、中间继电器等,初始状态时,料斗2在龙门架底部,翻板17上的定位销插入联轴器凹端8定位圈10孔内,搅拌桨无法转动,气缸4处于收回状态,联轴器凸端9和联轴器凹端8处于分离状态。
25.使用本实用新型时,智能配肥机控制系统接通电源,设备初始状态,料斗2在龙门架1底部,翻板17上的定位销插入联轴器凹端8定位圈10孔内,搅拌桨11无法转动,气缸4处
于收回状态,联轴器凸端9和联轴器凹端8处于分离状态。设备工作时,肥料进入料斗2,气缸4活塞杆伸出,带动活动框架6向左移动,由于搅拌电机5固定在活动框架6上,从而带动搅拌电机5向左移动,当移动到活动框架6上的顶杆19顶到翻板17时,翻板17上的定位销从定位圈10内移除,同时联轴器凸端9上的销钉插入联轴器凹端8的通孔内,当联轴器对位完成后,搅拌电机5开始转动,通过联轴器带动搅拌桨11进行转动,对料斗2内肥料进行搅拌,当设定的搅拌时间到达后,搅拌电机5停止运行,气缸4活塞杆收回,联轴器凸端9和联轴器凹端8分开,同时顶杆19也从翻板17上移开,翻板17在两根弹簧(16,18)作用下,翻板17上的定位销插入定位圈10内,确保料斗2在上升或下降过程中,搅拌桨11的角度不发生变化,从而保证在下次联轴器对位过程中能顺利插入。智能配肥机控制系统控制液压油缸对料斗2上的钢丝绳进行提升,料斗2在龙门架1轨道内向上运行,当运行到龙门架1顶部,感应器检测到信号后,料斗2停止上升,将斗内肥料全部倒入智能配肥机的缓冲仓内后,料斗2开始下降,当料斗2运行到龙门架1底部,底部感应器检测到信号后,料斗2停止运行,如此周而复始。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1