一种涂装喷涂机器人轨迹调试对点工具及设备的制作方法
本技术涉及汽车涂装,更具体地,涉及一种涂装喷涂机器人轨迹调试对点工具及设备。
背景技术:
1、在汽车涂装新车型导入过程中,新色开发是其中最重要的工作之一。新色开发工作主要通过喷涂机器人轨迹、参数调试体现。新车型喷涂机器人仿形轨迹调试工作量大,且重要性高,其调试结果直接影响后续正常生产品质。目前常用的调试对点方法是采用扎带捆绑机器人喷涂枪头定位法。如附图1所示,其工作原理为:使用两根扎带固定在枪头上,保持两根扎带沿枪头径向180°分布,两根扎带一端伸出,伸出部位使用胶带缠在一起,同时保持两根扎带朝向与枪头轴线重合,固定旋杯最前端端面到扎带伸出末端的距离,此为喷涂调试距离。调试时,枪头与喷涂面大致垂直,扎带末端与喷涂面接触,以此保证调试喷涂距离。因为机器人喷涂枪头大致呈圆柱状,表面光滑,扎带在枪头表面固定,容易滑动;另外,扎带固定纯手工操作,需不断测试、调整,保证扎带固定位置、呈现角度和伸出长度符合要求,同时,需要操作机器人在不同姿态下确认捆绑效果。因此,这种调试喷涂轨迹的方式操作较为复杂,每次调试,为保证达到要求,固定一个机器人枪头的扎带需用时30min,影响调试效率。此外,由于纯手工操作,扎带捆绑固定的位置、角度以及伸出长度等无法保证较高的精度,同时,不同机器手上固定扎带,也无法保证定位一致性,导致精度不高,调试喷涂不能达到预期效果。现有技术也有通过激光测试的方式对喷涂轨迹进行测量。
2、例如,现有技术公开了一种基于激光测距的机器人及喷漆路径的优化方法,其主要包括夹具、自动喷枪组件和激光测距设备,夹具上设有安装座,自动喷枪组件和激光测距设备错开时间的位于安装座的工作位,自动喷枪组件和激光测距设备分别单独安装于安装座时,自动喷枪组件中喷枪的喷涂点及其喷涂方向与激光测距设备的测距起始点及其测距方向同心共轴。在该公开的技术方案中,通过在喷漆机器人上安装激光测距设备,并且使喷漆机器人携带激光测距设备按照喷漆路径模型预览运行来获得和量化系统在运行过程中存在的系统误差即实测喷距差,再通过实测喷距差修正喷漆路径模型以克服或者降低系统误差,然后换上自动喷枪组件进行喷漆作业,该公开的技术方案能够提高喷漆质量,还能代替人工实现喷漆工艺的自动化。利用激光技术测距的方式相对具有成本低以及效率高的特点。但是利用激光测距时对环境的要求比较高,由于激光测距设备具有高度敏感的电子元件,因此当激光测距系统中的洁净度与温度没有达到标准,激光测距的精度就会受到影响。对于很多汽车生产以及喷涂厂家而言,很多车间的环境都没有达到激光测距元件所需的要求,或者说,激光测距本身的费用可能不高,但将喷涂车间设置为满足激光测距环境要求的成本比较高。因此,很多汽车喷涂车间并不会采用激光测距的方式获得喷涂轨迹,换而言之,利用激光测距获取喷涂轨迹的方式存在生产成本较高的问题。
技术实现思路
1、本实用新型为克服上述涂装新车过程中,存在获取喷涂轨迹精度低或者对环境要求高的问题,提供一种涂装喷涂机器人轨迹调试对点工具。同时本实用新型还提供一种涂装喷涂机器人轨迹调试设备。
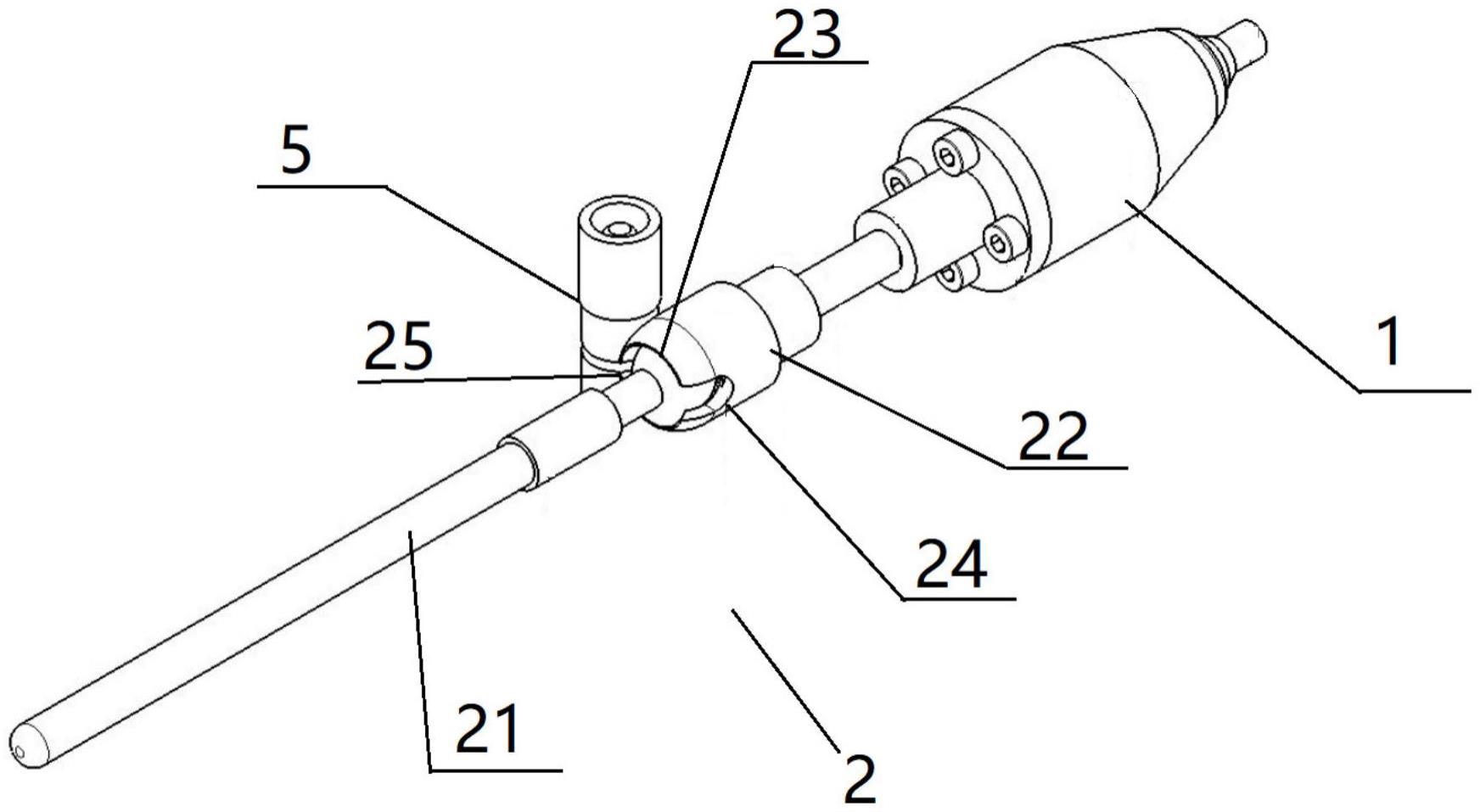
2、为解决上述技术问题,本实用新型采用的技术方案是:一种涂装喷涂机器人轨迹调试对点工具,包括转换云台以及调试杆组件,所述转换云台的一端与外接枪头的旋杯可拆卸连接,另一端与所述调试杆组件相连,所述调试杆组件的中轴线可与外接枪头的中轴线相重合。
3、在本技术方案中,将转换云台安装在外接枪头的旋杯上,并使调试杆组件的中轴线与外接枪头的中轴线相重合。调试对点时,使枪头与喷涂面垂直,调试杆组件远离枪头的一端与喷涂面接触,旋杯与喷涂面之间的距离即为喷涂距离。在本技术方案中,可拆卸连接的方式可以为螺纹连接,也可以为卡口卡槽等一些其它方式实现。因为喷涂枪头具有表面光滑、数据精确的特点,本技术方案通过调试杆组件与旋杯可拆卸连接,使本装置相对于传统通过扎带捆绑测量的方式具有安装时间少、不容易打滑的特点。同时,本装置相对于激光测距装置对测量的环境以及温度要求较低,节省喷涂轨迹测量的成本。
4、优选的,所述转换云台与调试杆组件相连的一端沿其轴线方向设有安装孔,所述安装孔设有弹性件,所述调试杆组件滑动安装在安装孔中并与所述弹性件相抵接。
5、优选的,所述调试杆组件包括测量杆以及万向球形云台组件,所述万向球形云台组件连接于测量杆与转换云台之间,所述万向球形云台组件的中轴线与所述转换云台的中轴线相重合,所述测量杆与所述万向球形云台组件相铰接。在本实施例中,通常情况下,喷涂机器人喷涂过程中,需保持较固定的喷涂距离及喷涂角度,因此新车型仿形轨迹调试时,需要借助辅助工具以保证喷涂距离及角度等。测量杆与所述万向球形云台组件相铰接可以使测量杆相对于外界枪头进行转动,进而可以测量出枪头的喷涂角度。
6、优选的,所述万向球形云台组件与测量杆相连的一端沿其轴线方向设有球形槽,所述万向球形云台组件的一侧部对应测量杆设有第一开口槽,所述第一开口槽与所述球形槽相连通,所述测量杆转动安装在所述球形槽中。在本实用新型中,测量杆可以从球形槽中转动至第一开口槽中,这样可以使测量杆与外接枪头之间具有一定夹角,进而可以对喷涂角度进行测量。同时,测量杆与万向球形云台组件相连的一端对应球形槽设有球形结构,球形结构可以在球形槽中进行周向的转动。
7、优选的,所述万向球形云台组件上设有用于限定测量杆转动的锁紧件。当测量杆在第一开口槽中转动一定角度后,通过锁紧件将测量杆锁紧,这样可以方便工作人员测量调试对点后的喷涂角度。同时,在本技术方案中,万向球形云台组件包括万向球形小云台以及光轴,光轴安装在安装孔中且光轴的中轴线与转化云台的中轴线相重合。
8、优选的,所述球形槽为弹性可收缩口,所述万向球形云台组件的另一侧部设有与球形槽相连通的第二开口槽,所述锁紧件包括设于第二开口槽一侧部的插接件以及设于第二开口槽另一侧部的通孔结构,所述插接件插接在所述通孔结构中。在本技术方案中,这样可以便于球形槽收缩锁紧测量杆。插接件与通孔结构螺纹连接。
9、优选的,所述测量杆转动角度的范围为0°~150°。
10、一种涂装喷涂机器人轨迹调试设备,包括涂装喷涂机器人轨迹调试对点工具、枪头以及旋杯,所述旋杯设于枪头一端面的中部,涂装喷涂机器人轨迹调试对点工具与旋杯可拆卸连接,涂装喷涂机器人轨迹调试对点工具的中轴线与所述枪头的中轴线相重合。
11、优选的,所述涂装喷涂机器人轨迹调试对点工具与旋杯螺纹连接。
12、与现有技术相比,本实用新型产生的有益效果是:
13、在本实用新型中,将转换云台安装在外接枪头的旋杯上,并使调试杆组件的中轴线与外接枪头的中轴线相重合。调试对点时,使枪头与喷涂面大致垂直,调试杆组件远离枪头的一端与喷涂面接触,旋杯与喷涂面质检的距离即为喷涂距离。在本实用新型中,可拆卸连接的方式可以为螺纹连接,也可以为卡口卡槽等一些其它方式实现。因为喷涂枪头具有表面光滑的特点,本实用新型通过调试杆组件与旋杯可拆卸连接的方式相对于传统通过扎带捆绑测量的方式具有安装时间少、不容易打滑的特点。同时,本装置相对于激光测距装置对测量的环境以及温度要求较低,节省喷涂轨迹测量的成本。
- 还没有人留言评论。精彩留言会获得点赞!