一种无动力自动夹持设备的制作方法
本技术涉及机械设备,尤其是指一种无动力自动夹持设备。
背景技术:
1、喷涂适用于手工作业及工业自动化生产,应用范围广主要有五金、塑胶、家私、军工、船舶等领域,是现今应用最普遍的一种涂装方式。在申请号为cn201120501385.1、申请名称为一种无动力夹紧装置的实用新型专利申请中公开了包括机床、夹具体、定夹块、动夹块和压块,定夹块装在固定座上,动夹块装在滑板上与定夹块相对应的一侧,压块装在滑板另一侧;固定座与滑板之间装有拉簧;夹具体装在回转工作台或自动线上,滑板在夹具体上实现前后移动。此申请需要将夹具体设置回转工作台或自动线,夹具体在通过回转工作台或自动线带动滑板和动夹块运动,夹具体与回转工作台或自动线的拆装不便;并且动夹块需要通过拉簧进行复位,动夹块在运动过程中缺少限位和导向结构,动夹块与定夹块夹持工件时的精准度差。因此,缺陷十分明显,亟需提供一种解决方案。
技术实现思路
1、为了解决上述技术问题,本实用新型的目的在于提供一种无动力自动夹持设备。
2、为了实现上述目的,本实用新型采用如下技术方案:
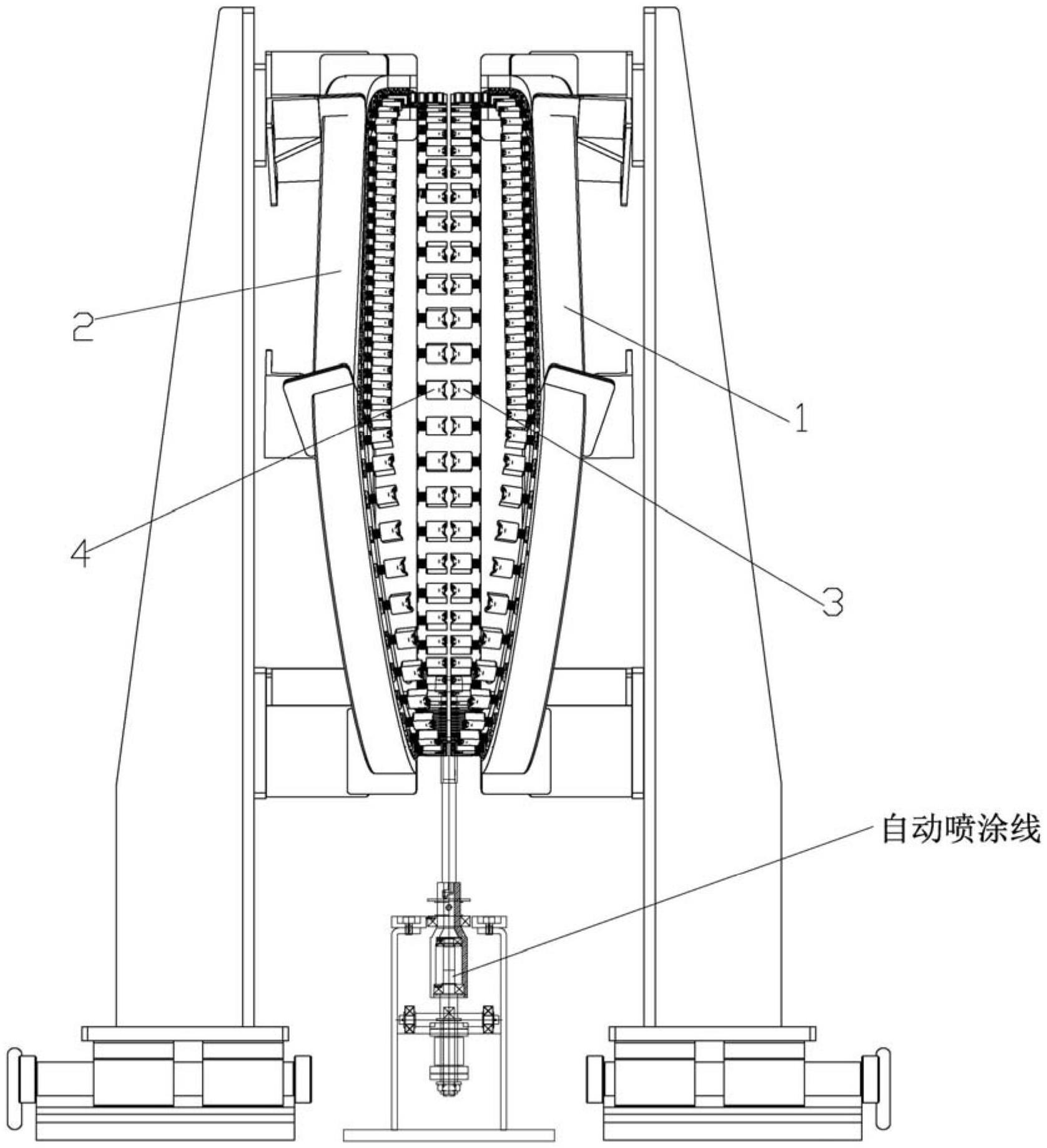
3、一种无动力自动夹持设备,其包括第一轨道、与第一轨道相对设置的第二轨道、分别与第一轨道活动连接的多个第一夹持组件、分别与第二轨道活动连接的多个第二夹持组件、设置于第一轨道上第一合拢段及设置于第二轨道上的第二合拢段;所述第一合拢段与第二合拢段之间的距离沿第一夹持组件或/和第二夹持组件的运动方向逐渐减少,运动至第一合拢段的第一夹持组件能与运动至第二合拢段的第二夹持组件相互靠拢以夹持外部工件或夹具。
4、进一步地,多个第一夹持组件首尾相接,相邻的两个第一夹持组件相互铰接;多个第二夹持组件首尾相接,相邻的两个第二夹持组件相互铰接。
5、进一步地,所述无动力自动夹持设备还包括设置于第一轨道上的第一夹持段及设置于第二轨道上的第二夹持段,沿第一夹持组件或/和第二夹持组件的运动方向,第一夹持段和第二夹持段分别位于第一合拢段和第二合拢段的前方,所述第一夹持段和第二夹持段在竖直方向上的高度不断升高。
6、进一步地,所述无动力自动夹持设备还包括设置于第一轨道上的第一下料段及设置于第二轨道上的第二下料段;沿第一夹持组件或/和第二夹持组件的运动方向,第一夹持段和第二夹持段分别位于第一下料段和第二下料段的前方,第一下料段和第二下料段之间的距离逐渐增大;滑动或滚动至第一下料段的第一夹持组件能与滑动或滚动至第二下料段的第二夹持组件相互远离以松开外部工件或夹具。
7、进一步地,沿第一夹持组件或/和第二夹持组件的运动方向,所述第一下料段和第二下料段在竖直方向上的高度不断降低。
8、进一步地,所述第一轨道包括轨道本体及由轨道本体的侧壁向内凹设而成的滑槽,所述第一夹持组件与滑槽的内侧壁滑动或滚动连接。
9、进一步地,所述第一夹持组件包括夹持座、设置于夹持座上的夹头及分别转动设置于夹持座上的水平滑动轮组和竖直滑动轮组,相邻的两个夹持座相互铰接。
10、进一步地,所述水平滑动轮组和竖直滑动轮组间隔设置且能分别相对于滑槽的内侧壁滚动。
11、进一步地,所述第一夹持组件还包括设置于夹持座上的连接件及套设于所述连接件外的弹性件,所述连接件的一端与夹持座伸缩地滑动连接,所述连接件的另一端与夹头连接,所述弹性件的两端分别与夹持座和夹头抵触。
12、进一步地,所述无动力自动夹持设备还包括接料组件,所述接料组件包括设置于第一轨道或第二轨道的一侧的接料盒及一端与接料盒连通的料道,所述料道的另一端突伸至第一轨道和第二轨道的中空空间内并位于第一下料段和第二下料段的下方。
13、本实用新型的有益效果:本实用新型对夹具的夹持利用喷涂输送线自身的动力,同时,通过第一轨道和第二轨道分别对第一夹持组件和第二夹持组件的运动进行导向或限位,进而不需要对第一夹持组件和第二夹持组件的滑动、滚动或夹持提供额外的动力源,以使得本实用性的结构得到简化,减少了生产和制造成本,同时减少了动力源驱动过程中可能出现的故障,实现了高效自动化连续下夹具。
技术特征:
1.一种无动力自动夹持设备,其特征在于:包括第一轨道(1)、与第一轨道(1)相对设置的第二轨道(2)、分别与第一轨道(1)活动连接的多个第一夹持组件(3)、分别与第二轨道(2)活动连接的多个第二夹持组件(4)、设置于第一轨道(1)上第一合拢段(11)及设置于第二轨道(2)上的第二合拢段(21);所述第一合拢段(11)与第二合拢段(21)之间的距离沿第一夹持组件(3)或/和第二夹持组件(4)的运动方向逐渐减小,运动至第一合拢段(11)的第一夹持组件(3)能与运动至第二合拢段(21)的第二夹持组件(4)相互靠拢以夹持外部工件或夹具。
2.根据权利要求1所述的一种无动力自动夹持设备,其特征在于:多个第一夹持组件(3)首尾相接,相邻的两个第一夹持组件(3)相互铰接;多个第二夹持组件(4)首尾相接,相邻的两个第二夹持组件(4)相互铰接。
3.根据权利要求1所述的一种无动力自动夹持设备,其特征在于:所述无动力自动夹持设备还包括设置于第一轨道(1)上的第一夹持段(12)及设置于第二轨道(2)上的第二夹持段(22);沿第一夹持组件(3)或/和第二夹持组件(4)的运动方向,第一夹持段(12)和第二夹持段(22)分别位于第一合拢段(11)和第二合拢段(21)的前方,所述第一夹持段(12)和第二夹持段(22)在竖直方向上的高度不断升高。
4.根据权利要求3所述的一种无动力自动夹持设备,其特征在于:所述无动力自动夹持设备还包括设置于第一轨道(1)上的第一下料段(13)及设置于第二轨道(2)上的第二下料段(23);沿第一夹持组件(3)或/和第二夹持组件(4)的运动方向,第一夹持段(12)和第二夹持段(22)分别位于第一下料段(13)和第二下料段(23)的前方,第一下料段(13)和第二下料段(23)之间的距离逐渐增大;滑动或滚动至第一下料段(13)的第一夹持组件(3)能与滑动或滚动至第二下料段(23)的第二夹持组件(4)相互远离以松开外部工件或夹具。
5.根据权利要求4所述的一种无动力自动夹持设备,其特征在于:沿第一夹持组件(3)或/和第二夹持组件(4)的运动方向,所述第一下料段(13)和第二下料段(23)在竖直方向上的高度不断降低。
6.根据权利要求1所述的一种无动力自动夹持设备,其特征在于:所述第一轨道(1)包括轨道本体及由轨道本体的侧壁向内凹设而成的滑槽(5),所述第一夹持组件(3)与滑槽(5)的内侧壁滑动或滚动连接。
7.根据权利要求6所述的一种无动力自动夹持设备,其特征在于:所述第一夹持组件(3)包括夹持座(31)、设置于夹持座(31)上的夹头(32)及分别转动设置于夹持座(31)上的水平滑动轮组(33)和竖直滑动轮组(34),相邻的两个夹持座(31)相互铰接。
8.根据权利要求7所述的一种无动力自动夹持设备,其特征在于:所述水平滑动轮组(33)和竖直滑动轮组(34)间隔设置且能分别相对于滑槽(5)的内侧壁滚动。
9.根据权利要求8所述的一种无动力自动夹持设备,其特征在于:所述第一夹持组件(3)还包括设置于夹持座(31)上的连接件(35)及套设于所述连接件(35)外的弹性件(36),所述连接件(35)的一端与夹持座(31)伸缩地滑动连接,所述连接件(35)的另一端与夹头(32)连接,所述弹性件(36)的两端分别与夹持座(31)和夹头(32)抵触。
10.根据权利要求4或5所述的一种无动力自动夹持设备,其特征在于:所述无动力自动夹持设备还包括接料组件(8),所述接料组件(8)包括设置于第一轨道(1)或第二轨道(2)的一侧的接料盒(81)及一端与接料盒(81)连通的料道(82),所述料道(82)的另一端突伸至第一轨道(1)和第二轨道(2)的中空空间内并位于第一下料段(13)和第二下料段(23)的下方。
技术总结
本技术涉及机械设备技术领域,尤其是指一种无动力自动夹持设备,其包括第一轨道、与第一轨道相对设置的第二轨道、分别与第一轨道活动连接的多个第一夹持组件、分别与第二轨道活动连接的多个第二夹持组件、设置于第一轨道上第一合拢段及设置于第二轨道上的第二合拢段;运动至第一合拢段的第一夹持组件能与运动至第二合拢段的第二夹持组件相互靠拢以夹持外部工件或夹具。本技术对夹具的夹持利用喷涂输送线自身的动力,通过第一轨道和第二轨道分别对第一夹持组件和第二夹持组件的运动进行导向或限位,进而不需要对第一夹持组件和第二夹持组件的滑动、滚动或夹持提供额外的动力源,以使得本实用性的结构得到简化,减少了生产和制造成本。
技术研发人员:刘鹏飞
受保护的技术使用者:东莞市铧光自动化机械有限公司
技术研发日:20221230
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!