整形机颗粒度自动控制方法与流程
本发明涉及智能控制领域,尤其涉及一种整形机颗粒度自动控制方法。
背景技术:
1、人造石墨是指以杂质含量较低的炭质原料为骨料,以煤沥青等为粘结剂,经过配料、混捏、成型、炭化和石墨化等工序制得的块状固体材料,如石墨电极、等静压石墨等,人造石墨的颗粒在制作完成后存在着形状不规则、粒度不均匀的问题,因此通常会采用整形焦粒生产装置对石墨颗粒进行整形。负极材料作为锂离子电池核心部件之一,对电池综合性能起着关键性作用。在现有负极材料中,人造石墨由于具有与电解液相容性好、循环性能和倍率性能佳等优点,成为商业化的锂离子电池负极材料。但一般的人造石墨颗粒(石油焦、针状焦、沥青焦)形状不规则、粒度不均匀、比表面积大、振实密度低、各向异性度高,导致材料加工性能差,极片反弹、电芯胀气、形变等问题突出。因此,如何得到形状规则且粒度均匀的人造石墨颗粒,提高其振实密度和各向同性度,改善电芯的循环性能及安全性能一直是人造石墨类负极材料研究开发的重点。
2、公开号为cn113231159a的专利文献公开的是一种人造石墨负极材料用整形焦粒生产装置,通过设置冲击板,通过冲击罩喷出并快速撞击冲击板,能够通过冲击板上整形孔的石墨颗粒即为整形完成,并会通过出料管排出至整形箱的外部,很显然,若是石墨颗粒在整形过程中,若是整形未完成依然存在在特定角度小时可以通过整形孔的,因此现有技术中对于整形颗粒的验证存在局限性。
技术实现思路
1、为此,本发明提供一种整形机颗粒度自动控制方法,可以解决现有技术中的对整形颗粒的验证存在局限性的问题。
2、为实现上述目的,本发明提供一种整形机颗粒度自动控制方法,包括:
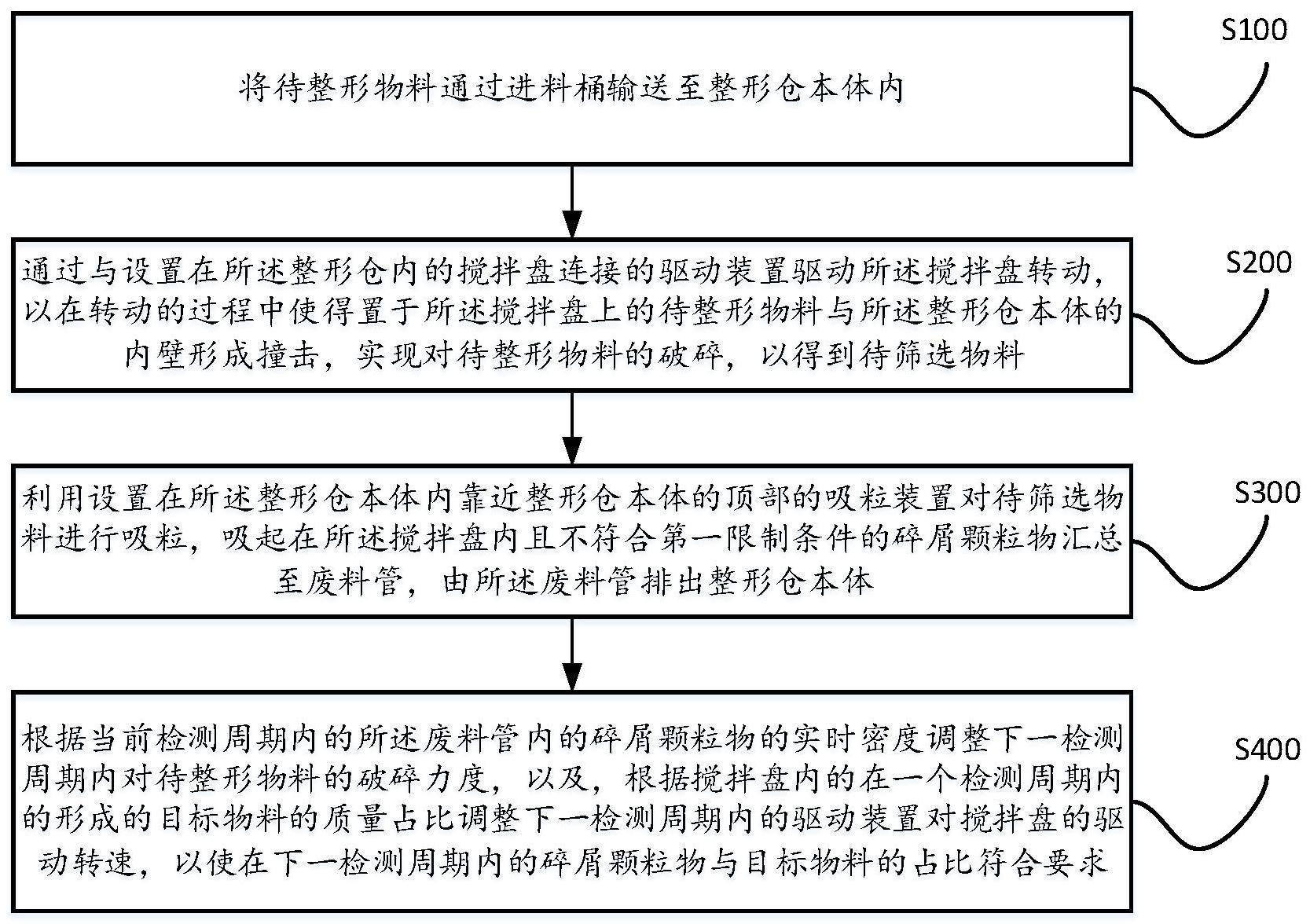
3、将待整形物料通过进料桶输送至整形仓本体内;
4、通过与设置在所述整形仓内的搅拌盘连接的驱动装置驱动所述搅拌盘转动,以在转动的过程中使得置于所述搅拌盘上的待整形物料与所述整形仓本体的内壁形成撞击,实现对待整形物料的破碎,以得到待筛选物料;
5、利用设置在所述整形仓本体内靠近整形仓本体的顶部的吸粒装置对待筛选物料进行吸粒,吸起在所述搅拌盘内且不符合第一限制条件的碎屑颗粒物汇总至废料管,由所述废料管排出整形仓本体;
6、根据当前检测周期内的所述废料管内的碎屑颗粒物的实时密度调整下一检测周期内对待整形物料的破碎力度,以及,根据搅拌盘内的在一个检测周期内的形成的目标物料的质量占比调整下一检测周期内的驱动装置对搅拌盘的驱动转速,以使在下一检测周期内的碎屑颗粒物与目标物料的占比符合要求;
7、所述第一限制条件为单颗碎屑颗粒物的重量小于等于第一预设重量。
8、进一步地,所述吸粒装置包括风扇轮和第一电机,所述第一电机与风扇轮电连接,所述第一风扇轮设置在整形仓本体的顶部,所述第一电机用以接收控制指令,以根据所述控制指令控制所述第一电机的转速,以在第一电机转动过程中实现对不符合第一预设重量的碎屑颗粒物进行吸附,并将吸收的碎屑颗粒物进行收集并排出整形仓本体外。
9、进一步地,根据当前检测周期内的所述废料管内的碎屑颗粒物的实时密度调整下一检测周期内对待整形物料的破碎力度包括:
10、预先设置有第一标准密度ρ10和第二标准密度ρ20,且ρ10小于ρ20;
11、在对废料管内的碎屑颗粒物的实时密度进行判断时,确定对破碎力度进行调整在第一密度条件、第二密度条件或是第三密度条件,其中所述第一密度条件为废料管内的碎屑颗粒物的实时密度小于第一标准密度ρ10;
12、所述第二密度条件为废料管内的碎屑颗粒物的实时密度大于等于第一标准密度ρ10且小于等于第二标准密度ρ20;
13、所述第三密度条件为废料管内的碎屑颗粒物的实时密度大于第二标准密度ρ20。
14、进一步地,在第一密度条件下则对下一检测周期内对待整形物料的破碎力度采用第一破碎参数来调整破碎力度;
15、在第二密度条件下则对下一检测周期内的待整形物料的破碎力度无需进行调整;
16、在第三密度条件下则对下一检测周期内对待整形物料的破碎力度采用第二破碎参数来调整破碎力度。
17、进一步地,根据搅拌盘内的在一个检测周期内的形成的目标物料的质量占比调整下一检测周期内的驱动装置对搅拌盘的驱动转速包括:
18、预先设置有第一标准占比p10和第二标准占比p20;
19、若是在第一约束条件下,则在下一检测周期内采用第一调整策略;
20、若是在第二约束条件下,则在下一检测周期内采用第二调整策略;
21、若是在第三约束条件下,则在下一检测周期内采用第三调整策略;
22、所述第一约束条件为检测周期内的形成的目标物料的质量占比小于第一标准占比p10;
23、所述第二约束条件为检测周期内的形成的目标物料的质量占比大于等于第一标准占比p10且小于等于第二标准占比p20;
24、所述第三约束条件为检测周期内的形成的目标物料的质量占比大于第二标准占比p20。
25、进一步地,所述第一调整策略为提高驱动装置对搅拌盘的驱动转速;
26、所述第二调整策略为保持驱动装置对搅拌盘的驱动转速;
27、第三调整策略为降低驱动装置对搅拌盘的驱动转速。
28、进一步地,在第一调整策略下,设置第一标准差值、第二标准差值,第一调整系数k1和第二调整系数k2,其中k1小于k2;
29、搅拌盘的额定转速设置为v0;
30、计算第一标准占比p10与检测周期内的形成的目标物料的质量占比,设定为实际差值;
31、若实际差值小于等于第一标准差值,则采用第一调整系数k1对额定转速进行提高;
32、若实际差值大于等于第一标准差值且小于等于第二标准差值,则采用第二调整系数k2对额定转速进行提高;
33、若实际差值大于第二标准差值,则表示采用额定转速。
34、进一步地,在采用第i调整系数ki对额定转速进行提高时,提高之后的搅拌盘的转速为v10=v0×(1+ki),i=1,2。
35、进一步地,在第三调整策略下,在降低了额定转速的基础上,若是在该周期结束之后,在进行下一检测周期内的搅拌盘的转速确定时,根据在第一检测周期调节以及运行整体情况,以及第二检测周期的调节以及运行整体情况分别进行记录,并根据第一检测周期和第二检测周期内的运行情况对第三运行周期的运行参数进行调整,以使在第三检测周期内确定是否对搅拌盘的转速进行回调。
36、进一步地,当需要对搅拌盘的转速进行回调时,根据第一检测周期内的运行参数曲线和第二检测周期内的运行参数曲线中的峰值与谷值做商形成的数值作为搅拌盘的转速的回调系数,并在第二检测周期内的转速的基础上利用所述回调系数完成对搅拌盘的转速的确定。
37、与现有技术相比,本发明的有益效果在于,通过设置检测周期,并根据前一周期内排出的废料管内的碎屑颗粒物的实时密度调整下一检测周期内对待整形物料的破碎力度,在实际应用中,若是破碎力度过大,则会导致相应的碎屑颗粒物增加,进而实时密度增加,为了保证对待整形物料的碎屑颗粒物数量的智能控制,因此通过周期性调整破碎力度能够有效保证物料中的待整形物料尽量转化为目标物料,使得通过整形提高物料的利用效率,另外,根据搅拌盘内在一个周期内生成的目标物料的占比来调整搅拌盘的驱动转速,以实现在转速调整的过程中在下一检测周期内提高目标物料的占比,以通过搅拌盘的碰撞降低碎屑颗粒的数量,提高目标物料的比例,以使得更多的物料能够符合实际的颗粒度要求,实现对目标物料的高效转化。
38、尤其,通过设置风扇轮和第一电机,使得在第一电机的动力驱动下带动风扇轮进行转动,而风扇轮在旋转过程中可以吸起搅拌盘内的不符合第一预设重量的碎屑颗粒物,并能够将吸收的碎屑颗粒物进行收集至管道内排出整形仓本体,本发明实施例将控制风扇轮的旋转吸力,保证能够将满足第一预设重量的物料保留在搅拌盘内作为目标物料进行整形,对于不满足要求的碎屑颗粒物尽量减少在搅拌盘内残存的时间,使得搅拌盘不做无用功,不对碎屑颗粒物进行整形加工,本发明实施例通过及时将碎屑颗粒物吸离搅拌盘,晚上搅拌盘内对目标物料的加工效率,且能够将不符合第一预设重量要求的碎屑物料进行收集,提高碎屑颗粒物的回收效率。
39、尤其,通过设置不同的密度条件,且在不同的密度条件下采用不同的破碎力的调整方式,通过设置两个标准密度实现对废料管内的碎屑颗粒物的实时密度进行更为精细的层次划分,进而对破碎力的调整更为精细更为智能,使得能够基于不同的密度层级对下一检测周期内的破碎力进行不同程度的调整,使得在相邻检测周围内通过对检测周期内的碎屑颗粒物的密度的精准取确定进而在后续的检测周期内对破碎力进行调整,使得在连续的对个检测周期内实现对碎屑颗粒物的密度的精确调整,提高整形机构中碎屑的质量以及生成的密度,使得目标物质的数量增多,提高转换效率。
40、尤其,通过针对不同的密度条件下选择不同的破碎参数来调整破碎力度,使得待整形物质在下一检测周期内进行不同程度的调整,进而通过多个检测周期的调整,将待整形物质中的碎屑颗粒物的密度调整至符合实际要求的范围,使得更多的待整形物质能够向目标物料进行转化,大大提高了整形物质的利用效率和整形效率,避免产生过多的碎屑颗粒物,实现经过多个检测周期内的小幅度调整,渐进式提高生产效率。
41、尤其,通过对下一检测周期内的驱动装置对搅拌盘的驱动转速进行调整,使得在连续多个检测周期内的目标物料的质量占比进行提升,使得对检测周期内的目标物料的质量占比进行精准确定,设置两个标准占比,用以来对目标物料的实际质量占比进行评估,并在不同的区间内设为不同的约束条件,并在不同的约束条件下进行不同的处理方式,使得在多个检测周期的调整实现目标物料的质量占比不断的提升,以实现整形物质的高效利用。
42、尤其,通过设置不同的调整策略实现对驱动速度进行不同程度的调整,使得搅拌盘的驱动转速能够在不断调整过程中使得目标物质的占比在不断提升,使得本发明实施例中的整形机颗粒度自动控制方法能够实现物质的有效整形且在整形过程中不算提高目标物质的输出占比,提高转化效率。
43、尤其,通过在第一调整策略下比较实际差值与预先设置的第一标准差值和第二标准差值的关系,并确定实际差值所处范围内,并根据在不同的范围内选择不同的调整系数,实现对额定转速的不同幅度的调整,使得调整之后的搅拌盘的转速更符合实际需要,实现对搅拌盘转速的精细化调整,使得本发明实施例中的搅拌盘内对待整形物质的整形更为高效,提高目标物质的转化效率。
44、尤其,通过在第三调整策略下,在对额定转速进行调整的基础上,根据第一检测周期和第二检测周期内的目标物质的形成情况用以推定各个周期内的运行情况,以根据前两个检测周期内的运行情况确定在第三检测周期内的运行参数,以使得在连续不断的多个检测周期内实现对目标物质的形成过程的精确调整,使得目标物质的占比不断提升,大大提高目标物质的转化效率。
45、尤其,通过对搅拌盘的转速进行回调时,对于调系数采用在第一检测周期内的运行参数曲线和第二检测周期内的运行参数曲线进行拟合,确定峰值与谷值,利用谷值除以峰值形成的数值最为回调系数,使得回调的参数可以体现前两个检测周期的运行情况,使得对于回调的幅度确定更为精准,符合实际运行需要,符合实际生产,大大提高目标物质的转化效率。
- 还没有人留言评论。精彩留言会获得点赞!