船舶用智能喷涂系统及喷涂方法与流程
本技术涉及喷涂设备及环保喷涂,特别是涉及船舶用智能喷涂系统及喷涂方法。
背景技术:
1、随着船舶建造技术水平的提高和对环保要求的加强,船舶涂装作业变得越来越复杂。为了保证喷涂质量,目前是通过人工操作喷漆设备对工件表面进行喷涂时,喷出的油漆呈雾状扩散性挥发状态,油漆颗粒及有害气体弥漫在整个工作区域。
2、喷涂面积大且为户外高空作业,喷漆产生的大量有机挥发物(voc)、漆雾颗粒以及有害气体均难以收集,都是直接排放,无法在保证喷漆质量的同时直接对有害气体进行回收对环境造成极大的污染。因此,传统的人工喷涂易产生环境污染和工作安全问题,并且最重要的是人工喷涂效率低下。
技术实现思路
1、基于此,有必要针对现有喷漆设备对船舶表面进行喷涂时,传统的人工喷涂易产生环境污染和工作安全问题,并且涂效率低下的问题,提供一种船舶用智能喷涂系统及喷涂方法。
2、一种船舶用智能喷涂系统,所述船舶用智能喷涂系统包括:第一移动机构、第二移动机构、第三移动机构、第一转动机构、第二转动机构、基座、喷头、测距件、倾角传感器以及罩体;
3、所述第一移动机构包括沿第一方向平行且沿第三方向间隔的两个第一直线模组,所述第二移动机构包括沿第二方向平行且沿所述第三方向间隔的两个第二直线模组,两个所述第二直线模组分别设置于两个所述第一直线模组上,所述第一直线模组能够驱动所述第二直线模组沿所述第一方向移动;所述第三移动机构的两端分别设置在两个所述第二直线模组上,两个所述第二直线模组能够驱动所述第三移动机构沿第二方向移动;两个所述第一直线模组靠近船舶的一端分别设置有所述测距件,所述第三移动机构的两端分别设置有所述测距件;
4、所述基座设置在所述第三移动组件上,所述第三移动组件能够驱动所述基座沿第三方向移动;所述第一转动机构的一端与所述基座连接;所述第二转动机构的一端与所述第一转动机构远离所述基座的一端连接,所述第一转动机构能够驱动所述第二转动机构绕所述第三方向的轴线相对所述基座转动;所述第二转动机构的另一端与所述罩体连接,并能够驱动所述罩体绕所述第二方向的轴线转动;所述罩体靠近所述船舶的开口处设置有所述倾角传感器和测距传感器;所述喷头穿设于所述罩体的罩顶,所述喷头的出口端伸入所述罩体内,所述喷头用于向所述罩体的开口侧喷漆;所述第一方向、所述第二方向、所述第三方向两两垂直。
5、上述的船舶用智能喷涂系统在实施使用中,首先将船舶用智能喷涂系统放置于运载装置上,随后将第三移动机构固定,通过第一移动机构、第二移动机构、第三移动机构、第一转动机构以及第二转动机构的运动带动罩体移动和转动。通过测距件、倾角传感器、测距传感器保证罩体在x轴方向和y轴方向的可移动范围内的各个位置时,罩体的开口与船舶的表面的切面平行,且罩体的开口与船舶的表面的最小距离为一特定距离(该特定距离为30-100mm),且在移动与转动过程中喷头进行喷漆,从而实现自动化高质量的喷涂作业,提高效率节省时间。
6、本技术还提供一种船舶用智能喷涂系统的喷涂方法,使用所述的船舶用智能喷涂系统对所述船舶的表面进行喷涂,所述船舶用智能喷涂系统的喷涂方法包括以下步骤:
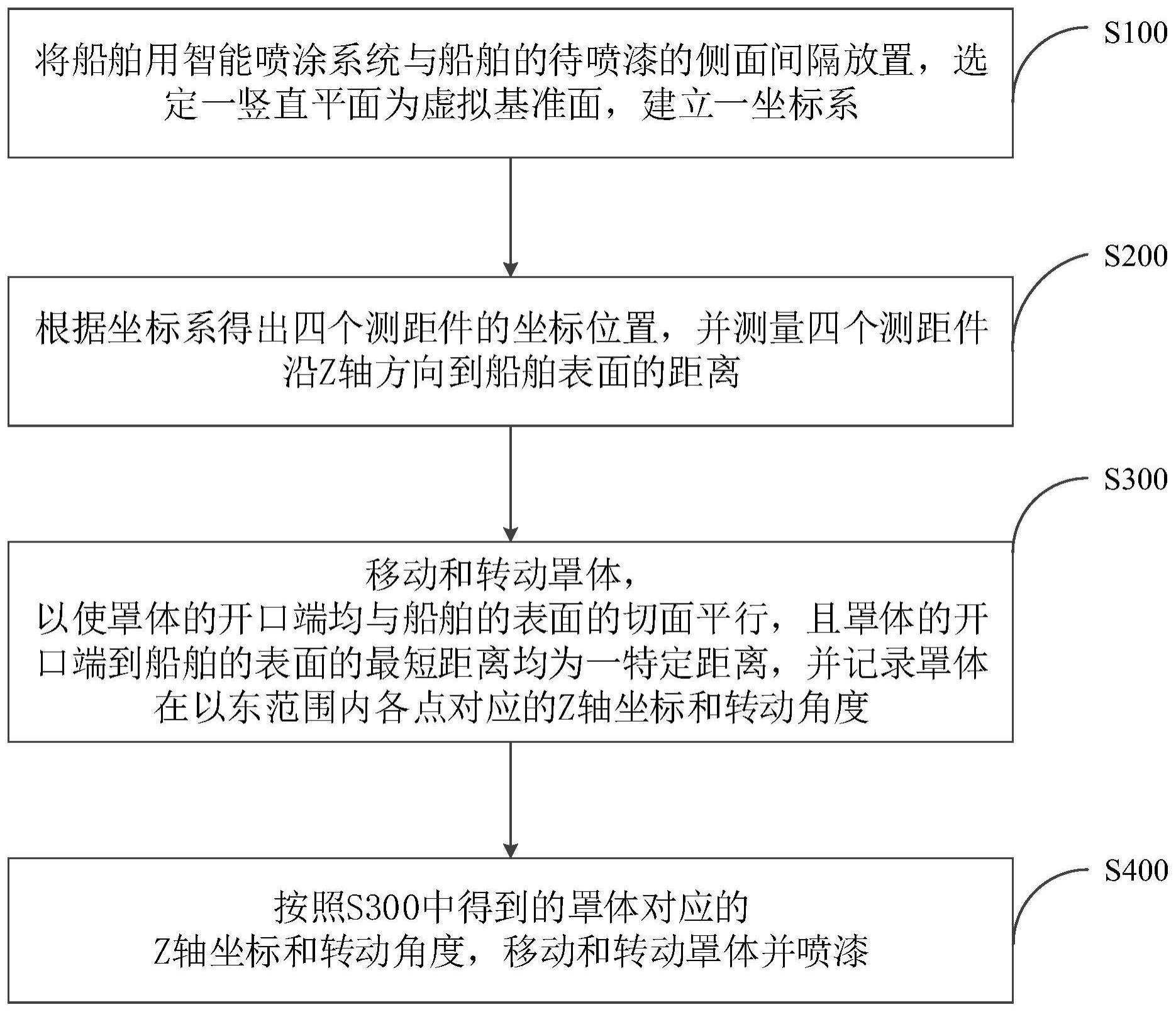
7、s100:将船舶用智能喷涂系统与船舶的待喷漆的侧面间隔放置,选定一竖直平面为虚拟基准面,建立一坐标系:以四个所述测距件在虚拟基准面上的投影所围成的区域的中心为坐标原点,建立沿所述第一方向的x轴,沿所述第二方向的y轴,沿所述第三方向的z轴,从而确定第一移动机构、第二移动机构以及第三移动机构对应的移动距离的参数坐标,方便进行自动化的坐标转换与记录;
8、s200:根据所述坐标系得出四个所述测距件的坐标位置,并测量四个所述测距件沿z轴方向到船舶表面的距离,从而根据虚拟基准面与四个测距件所测得的距离数据,初步确定罩体在z轴方向的移动范围;
9、s300:通过所述第一移动机构、所述第二移动机构、所述第三移动机构、第一转动机构以及第二转动机构的运动带动所述罩体移动和转动,以使所述罩体在所述x轴方向和所述y轴方向的可移动范围内的各个位置时,所述罩体的开口端均与船舶的表面的切面平行,且所述罩体的开口端到船舶的表面的最短距离均为一特定距离,并记录所述罩体对应所述z轴坐标和所述罩体的转动角度,罩体在x轴方向和y轴方向的可移动范围内的各个位置时,从而在喷涂前确定罩体z轴的移动距离和转动角度,从而防止在未进行检测直接喷漆并在喷漆时调整导致的喷涂厚度不均;
10、s400:按照s300中所得到的所述罩体在所述x轴方向和所述y轴方向的可移动范围内的各个位置时所记录的所述罩体对应所述z轴坐标和所述罩体的转动角度,通过所述第一移动机构、所述第二移动机构、所述第三移动机构、第一转动机构以及第二转动机构的运动带动所述罩体移动和转动并喷漆,从而能够保证在已进行罩体姿态检查后,根据s300的参数直接进行调整,保证了罩体姿态调整的效率,提高了喷涂质量。
11、使用上述的船舶用智能喷涂系统对船舶的表面进行喷涂,以船舶用智能喷涂系统的喷涂方法对船舶表面进行喷漆,从而在实现自动化喷涂的前提下,进行罩体在x轴方向和y轴方向的可移动范围内的各个位置的姿态检测并记录数据,保证罩体的开口端均与船舶的表面的切面平行,且罩体的开口端到船舶的表面的最短距离均为一特定距离,随后根据检测所得的数据进行喷漆过程中的实时调整,从而保证了喷涂质量。
12、在一实施例中,所述的船舶用智能喷涂系统的喷涂方法还包括在步骤s200之后和步骤s300之前的步骤s210;
13、s210:计算所述罩体在所述x轴方向和所述y轴方向的可移动范围内的各个位置时所对应的所述罩体的倾角,满足所述罩体在所述x轴方向和所述y轴方向的可移动范围内的各个位置时,所述罩体的开口端能与船舶的表面的切面平行;
14、以及所述罩体在所述x轴方向和所述y轴方向的可移动范围内的各个位置时所对应的z轴坐标,满足所述罩体在所述x轴方向和所述y轴方向的可移动范围内的各个位置时,所述罩体的开口端到船舶的表面的最短距离为一特定距离。
15、在一实施例中,所述步骤s300还包括:
16、s310:基于s210所计算的所述罩体在所述x轴方向和所述y轴方向的可移动范围内的各个位置到船舶的垂直距离和各点对应的船舶表面的倾角对应所述第一直线模组的传动距离及第一转动机构和第二转动机构的转动角度,移动所述罩体进行所述罩体的姿态检测,所述倾角传感器和所述测距传感器分别用以检测所述罩体运动过程中实时计算所述罩体开口到船舶表面的垂直距离以及所述罩体的开口和船舶的表面的切面的倾角是否为零。
17、在一实施例中,所述步骤s300还包括:
18、s320:在s310步骤中,移动所述罩体时,若所述罩体在所述x轴方向和所述y轴方向的可移动范围内的各个位置时所述罩体开口到船舶表面的垂直距离满足要求以及所述罩体的开口和船舶表面的切面的倾角为零,则停止调整,若所述罩体开口到船舶表面的垂直距离不满足要求或所述罩体开口和船舶表面的切面的倾角不为零,则进行调整,以保证若所述坐标各点所述罩体开口到船舶表面的垂直距离满足要求以及所述罩体的开口和船舶的表面的切面的倾角是否为零。
19、在一实施例中,所述第三移动机构的两端分别设置有第一限位模块,两个所述第一直线模组远离船舶的一端分别设置有第二限位模块,两个所述第二直线模组远离所述第一直线模组的一端分别设置有第三限位模块,两个所述第二直线模组靠近所述第一直线模组的一端分别设置有第四限位模块,所述第三移动机构的两端分别设置有第五限位模块和第六限位模块;
20、所述步骤s400还包括:
21、s410:姿态检测完成之后,所述第三移动机构带动所述基座运动至所述第所述五限位模块处,所述第二直线模组带动所述第三移动机构运动至所述第三限位模块,所述罩体垂直于所述船舶表面,所述第三移动机构带动所述罩体由所述第五限位模块移动至所述第六限位模块,在所述罩体移动过程中,所述第一直线模组带动所述第二直线模组移动以保证所述罩体开口到所述船舶表面的最短距离为一特定距离,所述第一转动模块和所述第二转动模块带动所述罩体转动以保证所述罩体开口和船舶表面的切面的倾角为零,所述罩体移动过程中,所述喷头进行喷漆。
22、在一实施例中,所述步骤s400还包括:
23、s420:所述第三移动机构带动所述罩体由所述第五限位模块移动至所述第六限位模块后,所述第二直线模组带动所述第三移动机构由所述第三限位模块移动至所述第四限位模块,在所述罩体移动过程中,所述第一直线模组带动所述第二直线模组移动以保证所述罩体开口到所述船舶表面的最短距离为一特定距离,所述第一转动模块和所述第二转动模块带动所述罩体转动以保证所述罩体开口和船舶表面的切面的倾角为零,所述罩体移动过程中,所述喷头进行喷漆。
24、在一实施例中,所述步骤s400还包括:
25、s430:所述第二直线模组带动所述第三移动机构由所述第三限位模块移动至所述第四限位模块后,所述第三移动机构带动所述罩体由所述第六限位模块移动至所述第五限位模块,在所述罩体移动过程中,所述第一直线模组带动所述第二直线模组移动以保证所述罩体开口到所述船舶表面的最短距离为一特定距离,所述第一转动模块和所述第二转动模块带动所述罩体转动以保证所述罩体开口和船舶表面的切面的倾角为零,所述罩体移动过程中,所述喷头进行喷漆。
26、在一实施例中,所述第二限位模块与所述第一限位模块之间设置有第一原点模块,所述第三限位模块与所述第四限位模块之间设置有第二原点模块,所述第五限位模块和第六限位模块之间设置有第三原点模块,所述的船舶用智能喷涂系统的喷涂方法还包括步骤s400后的步骤s500:
27、s500:通过所述第一移动机构移动至所述第一原点模块所处位置、所述第二移动机构移动至所述第二原点模块所处位置、所述第三移动机构移动至所述第三原点模块所处位置,以带动所述罩体移动至零点位。
28、在一实施例中,所述的船舶用智能喷涂系统的喷涂方法还包括步骤s500后的步骤s600:
29、s600:沿所述第二方向移动所述船舶用智能喷涂系统,以使所述第二移动机构上的测距件处于s100中第一移动机构上的测距件所在的位置或述第一移动机构上的测距件处于s100中第二移动机构上的测距件所在的位置,重复步骤s100-s400;或
30、沿所述第三方向移动所述船舶用智能喷涂系统,以使其中一个所述第一直线模组上的测距件处于另一个所述第一直线模组上的测距件在s100中的位置,重复步骤s100-s400。
31、在一实施例中,当所述第一移动机构和所述第二移动机构上的其中一个测距件无法工作时,所述步骤s600还包括步骤s610:
32、s610:沿所述第二方向或所述第三方向移动所述船舶用智能喷涂系统后,将步骤s600中无法工作的测距件相邻的测距件的数据和步骤s100中无法工作的测距件相邻的测距件的数据的差值的1/2,加到无法工作的传感器在s100中使用的数据上,重复步骤s100-s400。
33、在一实施例中,当步骤s300得出的所述罩体绕所述第三方向的转动角度较小时,所述步骤s300中的所述罩体的移动速度降低。
- 还没有人留言评论。精彩留言会获得点赞!