布袋除尘器的控制系统及方法与流程
本申请涉及智能控制领域,且更为具体地,涉及一种布袋除尘器的控制系统及方法。
背景技术:
1、布袋除尘器是把粉尘从烟气中分离出来的设备,而布袋除尘器是一种干式高效除尘器,它是利用纤维编制物制作的袋式过滤元件来捕集含尘气体中固体颗粒物的除尘装置。风机是布袋除尘器系统中的关键设备,用于产生气流并驱动气流通过滤袋进行除尘。如果风机的转速过大,可能会导致布袋的磨损加剧,引起布袋表面的颤动或振动。若转速过小,无法有效捕集颗粒物,颗粒物在布袋表面积聚过多,影响除尘效率。但由于现有技术中对除尘中风机的转速很难精确地控制,进而导致除尘效果不佳。
2、因此,期待一种优化的布袋除尘器的控制方案。
技术实现思路
1、为了解决上述技术问题,提出了本申请。本申请的实施例提供了一种布袋除尘器的控制系统及方法,其采用基于深度神经网络模型的人工智能技术,获取预定时间段的多个预定时间点的电机的转速和风机的叶片角度,将转速和叶片角度排列为向量后通过特征提取器提取相关特征信息,关联编码后通过卷积网络进一步地将低维信息映射到高维特征空间,以得到用于表示当前时间点的风机转速的转速应增大、减小还是不变的分类结果。这样可以实现对风机转速的自动调节,以适应不同工艺和处理物料条件下的除尘需求。
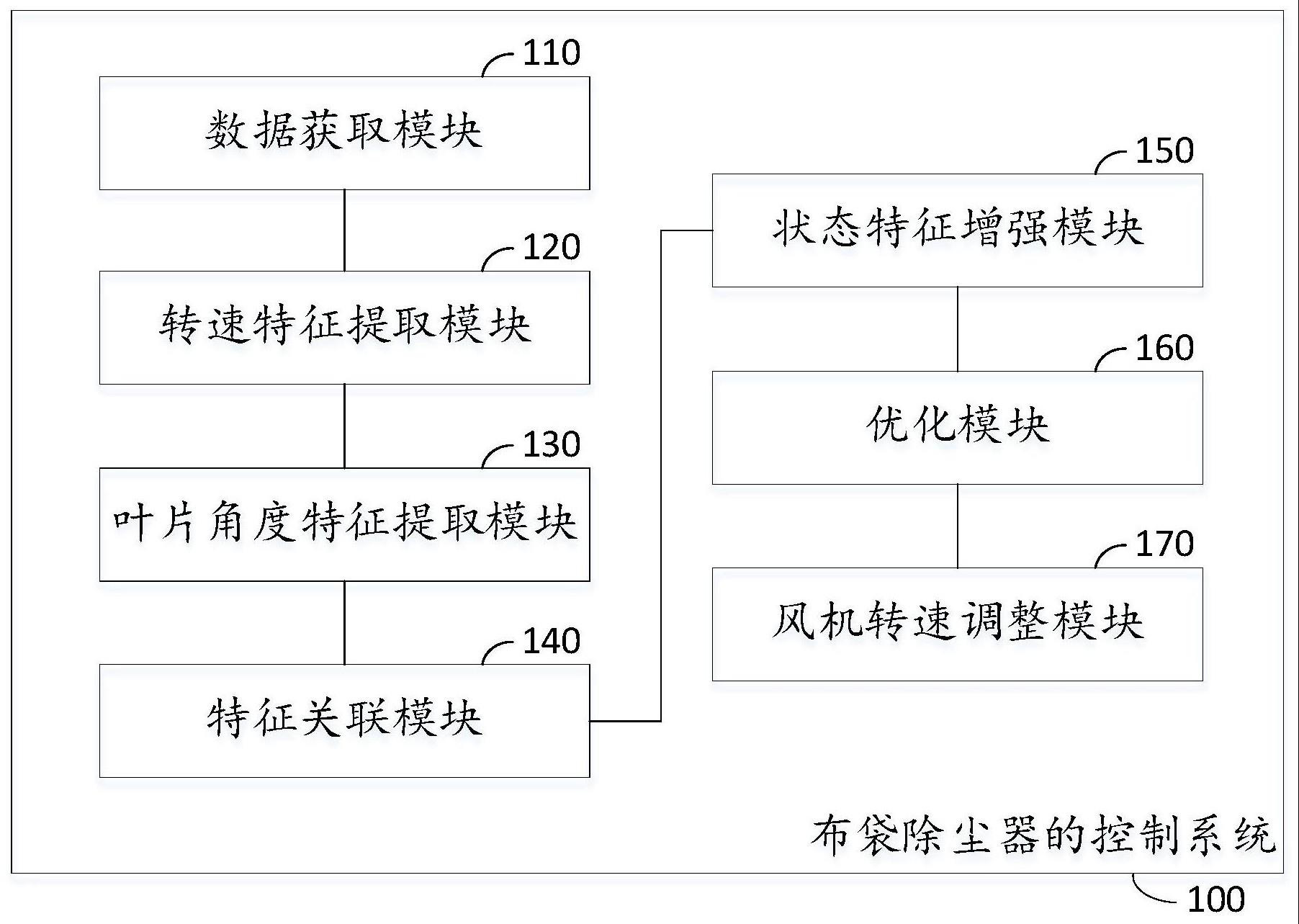
2、根据本申请的一个方面,提供了一种布袋除尘器的控制系统,其包括:
3、数据获取模块,用于获取预定时间段的多个预定时间点的电机的转速和风机的叶片角度;
4、转速特征提取模块,用于将所述多个预定时间点的电机的转速按照时间维度排列为转速时序输入向量后通过包含第一卷积和第二卷积的转速特征提取器以得到转速时序特征向量;
5、叶片角度特征提取模块,用于将所述多个预定时间点的风机的叶片角度按照时间维度排列为角度时序输入向量后通过包含第一卷积和第二卷积的角度特征提取器以得到角度时序特征向量;
6、特征关联模块,用于将所述转速时序特征向量和所述角度时序特征向量进行关联编码以得到风机工作状态关联矩阵;
7、状态特征增强模块,用于将所述风机工作状态关联矩阵通过作为特征提取器的卷积神经网络模型以得到风机工作状态特征图;
8、优化模块,用于对所述风机工作状态特征图进行特征流形调制以得到优化风机工作状态特征图;
9、风机转速调整模块,用于将所述优化风机工作状态特征图通过分类器以得到分类结果,所述分类结果用于表示当前时间点的风机转速的转速应增大、减小还是不变。
10、在上述布袋除尘器的控制系统中,所述转速特征提取模块,包括:第一尺度转速特征提取单元,用于将所述转速时序输入向量输入所述包含第一卷积和第二卷积的转速特征提取器的第一卷积层以得到第一尺度转速时序特征向量,其中,所述第一卷积层具有第一长度的第一一维卷积核;第二尺度转速特征提取单元,用于将所述转速时序输入向量输入所述包含第一卷积和第二卷积的转速特征提取器的第二卷积层以得到第二尺度转速时序特征向量,其中,所述第二卷积层具有第二长度的第二一维卷积核,所述第一长度不同于所述第二长度;以及,转速特征融合单元,用于使用所述包含第一卷积和第二卷积的转速特征提取器的级联层将所述第一尺度转速时序特征向量和所述第二尺度转速时序特征向量进行级联以得到所述转速时序特征向量。
11、在上述布袋除尘器的控制系统中,所述叶片角度特征提取模块,包括:第一尺度角度特征提取单元,用于将所述角度时序输入向量输入所述包含第一卷积和第二卷积的角度特征提取器的第一卷积层以得到第一尺度角度时序特征向量,其中,所述第一卷积层具有第一长度的第一一维卷积核;第二尺度角度特征提取单元,用于将所述角度时序输入向量输入所述包含第一卷积和第二卷积的角度特征提取器的第二卷积层以得到第二尺度角度时序特征向量,其中,所述第二卷积层具有第二长度的第二一维卷积核,所述第一长度不同于所述第二长度;以及,角度特征融合单元,用于使用所述包含第一卷积和第二卷积的角度特征提取器的级联层将所述第一尺度角度时序特征向量和所述第二尺度角度时序特征向量进行级联以得到所述角度时序特征向量。
12、在上述布袋除尘器的控制系统中,所述特征关联模块,用于:分别计算所述转速时序特征向量的转置向量与所述角度时序特征向量之间的乘积以得到所述风机工作状态关联矩阵。
13、在上述布袋除尘器的控制系统中,所述状态特征增强模块,用于:使用所述作为特征提取器的卷积神经网络模型的各层在层的正向传递中分别对输入数据进行:对输入数据进行卷积处理以得到卷积特征图;对所述卷积特征图的进行基于局部特征矩阵的池化以得到池化特征图;以及,对所述池化特征图进行非线性激活以得到激活特征图;其中,所述作为特征提取器的卷积神经网络模型的最后一层的输出为所述风机工作状态特征图,所述作为特征提取器的卷积神经网络模型的第一层的输入为所述风机工作状态关联矩阵。
14、在上述布袋除尘器的控制系统中,所述风机转速调整模块,包括:展开单元,用于将所述优化风机工作状态特征图展开为分类特征向量;全连接编码单元,用于使用所述分类器的全连接层对所述分类特征向量进行全连接编码以得到编码分类特征向量;以及,分类结果单元,用于将所述编码分类特征向量通过所述分类器的softmax分类函数以得到所述分类结果。
15、根据本申请的另一方面,提供了一种布袋除尘器的控制方法,其包括:
16、获取预定时间段的多个预定时间点的电机的转速和风机的叶片角度;
17、将所述多个预定时间点的电机的转速按照时间维度排列为转速时序输入向量后通过包含第一卷积和第二卷积的转速特征提取器以得到转速时序特征向量;
18、将所述多个预定时间点的风机的叶片角度按照时间维度排列为角度时序输入向量后通过包含第一卷积和第二卷积的角度特征提取器以得到角度时序特征向量;
19、将所述转速时序特征向量和所述角度时序特征向量进行关联编码以得到风机工作状态关联矩阵;
20、将所述风机工作状态关联矩阵通过作为特征提取器的卷积神经网络模型以得到风机工作状态特征图;
21、对所述风机工作状态特征图进行特征流形调制以得到优化风机工作状态特征图;
22、将所述优化风机工作状态特征图通过分类器以得到分类结果,所述分类结果用于表示当前时间点的风机转速的转速应增大、减小还是不变。
23、与现有技术相比,本申请提供的一种布袋除尘器的控制系统及方法,其采用基于深度神经网络模型的人工智能技术,获取预定时间段的多个预定时间点的电机的转速和风机的叶片角度,将转速和叶片角度排列为向量后通过特征提取器提取相关特征信息,关联编码后通过卷积网络进一步地将低维信息映射到高维特征空间,以得到用于表示当前时间点的风机转速的转速应增大、减小还是不变的分类结果。这样可以实现对风机转速的自动调节,以适应不同工艺和处理物料条件下的除尘需求。
技术特征:
1.一种布袋除尘器的控制系统,其特征在于,包括:
2.根据权利要求1所述的布袋除尘器的控制系统,其特征在于,所述转速特征提取模块,包括:
3.根据权利要求2所述的布袋除尘器的控制系统,其特征在于,所述叶片角度特征提取模块,包括:
4.根据权利要求3所述的布袋除尘器的控制系统,其特征在于,所述特征关联模块,用于:
5.根据权利要求4所述的布袋除尘器的控制系统,其特征在于,所述状态特征增强模块,用于:
6.根据权利要求5所述的布袋除尘器的控制系统,其特征在于,所述优化模块,包括:
7.根据权利要求6所述的布袋除尘器的控制系统,其特征在于,所述风机转速调整模块,包括:
8.一种布袋除尘器的控制方法,其特征在于,包括:
9.根据权利要求8所述的布袋除尘器的控制方法,其特征在于,将所述多个预定时间点的电机的转速按照时间维度排列为转速时序输入向量后通过包含第一卷积和第二卷积的转速特征提取器以得到转速时序特征向量,包括:
10.根据权利要求9所述的布袋除尘器的控制方法,其特征在于,将所述转速时序特征向量和所述角度时序特征向量进行关联编码以得到风机工作状态关联矩阵,包括:
技术总结
本申请涉及智能控制领域,其具体地公开了一种布袋除尘器的控制系统及方法,其采用基于深度神经网络模型的人工智能技术,获取预定时间段的多个预定时间点的电机的转速和风机的叶片角度,将转速和叶片角度排列为向量后通过特征提取器提取相关特征信息,关联编码后通过卷积网络进一步地将低维信息映射到高维特征空间,以得到用于表示当前时间点的风机转速的转速应增大、减小还是不变的分类结果。这样可以实现对风机转速的自动调节,以适应不同工艺和处理物料条件下的除尘需求。
技术研发人员:郭维
受保护的技术使用者:德清众新环保设备有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!