压滤机的堵料识别方法及系统与流程
本发明涉及一种选煤,特别是涉及一种压滤机的堵料识别方法及系统。
背景技术:
1、压滤机是一种常用的固液分离设备,广泛应用于煤炭、铁矿、城市污水处理行业,也作为主要的煤泥水处理设备在选煤厂大量应用。目前,当煤质泥化严重时,压滤机在卸料过程中,若卸料不彻底时需人工确认滤板状态,如遇卸料不畅或堵料的情况必须停止设备运行,手动清理后再重启设备。但是,由于反复人工干预造成设备人工维护工作量大、压滤效率低下。现有的压滤机堵料监测通常基于视觉识别,易受工作环境干扰,实际上难以有效监测排料状况,从而大大降低了压滤机的堵料识别准确性,导致无法与自动清理。
技术实现思路
1、有鉴于此,本发明提供一种压滤机的堵料识别方法及系统,主要目的在于解决现有压滤机的堵料识别准确性差的问题。
2、依据本发明一个方面,提供了一种压滤机的堵料识别方法,包括:
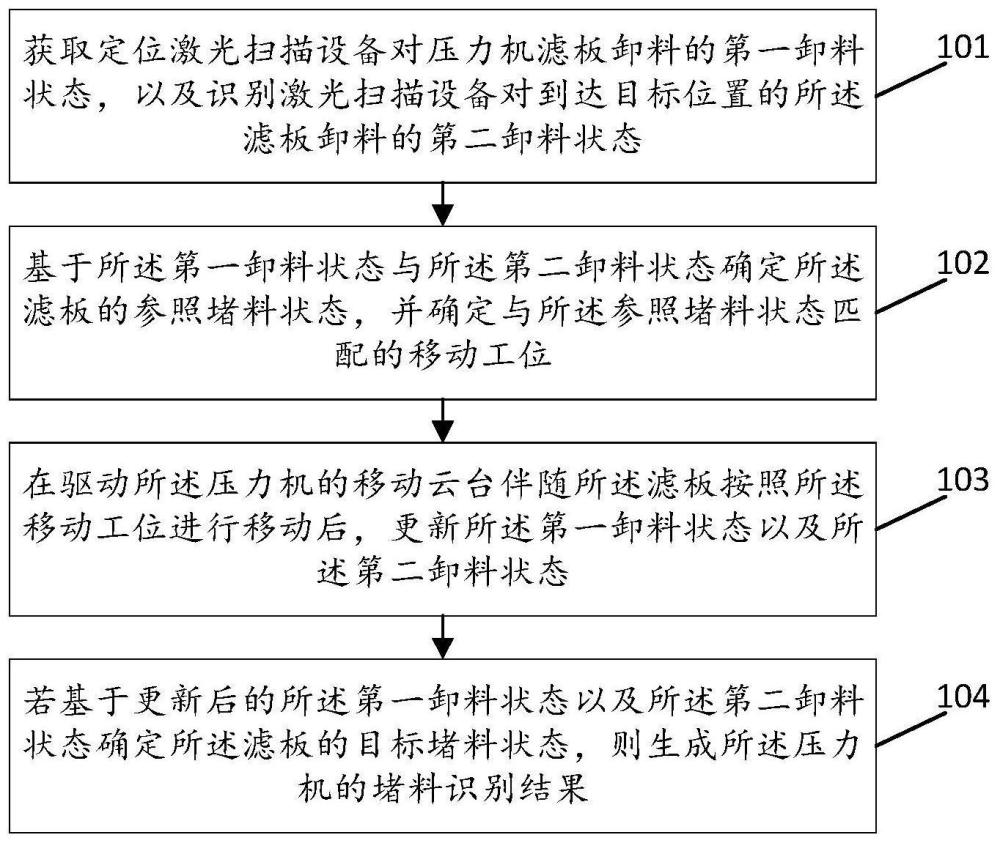
3、获取定位激光扫描设备对压力机滤板卸料的第一卸料状态,以及识别激光扫描设备对到达目标位置的所述滤板卸料的第二卸料状态;
4、基于所述第一卸料状态与所述第二卸料状态确定所述滤板的参照堵料状态,并确定与所述参照堵料状态匹配的移动工位;
5、在驱动所述压力机的移动云台伴随所述滤板按照所述移动工位进行移动后,更新所述第一卸料状态以及所述第二卸料状态,所述移动云台上配置有所述定位激光扫描设备以及所述识别激光扫描设备;
6、若基于更新后的所述第一卸料状态以及所述第二卸料状态确定所述滤板的目标堵料状态,则生成所述压力机的堵料识别结果。
7、进一步地,所述定位激光扫描设备包括第一激光雷达设备以及至少两个角反射器,所述角反射器置于所述滤板边缘上,所述获取定位激光扫描设备对压力机滤板卸料的第一卸料状态包括:
8、在所述第一激光雷达设备伴随所述移动云台移动过程中,采集所述第一激光雷达设备向所述角反射器发射定位射线,并在通过所述定位射线对所述滤板进行标定后,控制所述所述第一激光雷达设备扫描所述滤板卸料的第一卸料残余信号,确定所述第一卸料状态;
9、所述识别激光扫描设备包括第二激光雷达设备,所述第二激光雷达设备置于所述移动云台的边缘上,所述识别激光扫描设备对到达目标位置的所述滤板卸料的第二卸料状态包括:
10、当检测到滤板移动至目标位置时,则控制所述第二激光雷达设备扫描所述滤板卸料的第二卸料残余信号,并基于所述第二卸料残余信号确定所述第二卸料状态。
11、进一步地,所述方法还包括:
12、调取与所述目标位置匹配的卸料最大限值,其中,不同目标位置对应不同的卸料最大限值;
13、若所述第一卸料残余信号匹配所述卸料最大限值,则将所述第一卸料残余信号与所述卸料最大限值的差值确定所述第一卸料状态;
14、若所述第一卸料残余信号不匹配所述卸料最大限值,则将所述第一卸料残余信号确定所述第一卸料状态。
15、进一步地,所述基于所述第一卸料状态与所述第二卸料状态确定所述滤板的参照堵料状态,并确定与所述参照堵料状态匹配的移动工位包括:
16、基于已完成模型训练的卷积神经网络模型对所述第一卸料状态以及所述第二卸料状态进行堵料分类处理,确定所述参照堵料状态,所述卷积神经网络模型为基于带有不同堵料状态标签的卸料状态训练样本进行训练得到的;
17、基于预设堵料移动复位映射关系确定与所述参照堵料状态匹配的移动工位,所述预设堵料移动复位映射关系中记录有与不同参照堵料状态对应的移动工位。
18、进一步地,所述生成所述压力机的堵料识别结果之前,所述方法还包括:
19、计算更新后的所述第一卸料状态与更新后的所述第二卸料状态的差值;
20、若所述差值大于卸料流动最大值,则生成卸料的目标堵料状态,所述卸料流动最大值为基于物料卸料流率确定的;
21、若所述差值小于或等于所述卸料流动最大值,则将生成非堵料状态,并确定卸料反复移动所述移动云台的更新移动工位以及移动次数,以按照所述移动次数驱动所述移动云台按照所述更新移动工位进行移动。
22、进一步地,所述生成所述压力机的堵料识别结果之前,所述方法还包括:
23、对更新后的所述第一卸料状态、所述第二卸料状态的数值矩阵进行正交求解,得到正交矩阵;
24、基于预设堵料识别公式计算所述正交矩阵的堵料数值表征,所述预设堵料识别公式为
25、若所述堵料数值表征大于物料堵料系数,则确定所述滤板处于目标堵料状态;
26、若所述堵料数值表征小于或等于物料堵料系数,则确定所述滤板处于非堵料状态。
27、进一步地,所述方法还包括:
28、在驱动所述压力机的移动云台伴随所述滤板按照所述移动工位进行移动过程中,实时采集所述移动工位的移动速度;
29、若所述移动速度小于预设速度阈值,则确定所述移动平台为卡顿状态,生成平台卡顿预警信号。
30、依据本发明另一个方面,提供了一种压滤机的堵料识别系统,包括:处理器、定位激光扫描设备、识别激光扫描设备、伴随滤板移动的移动云台,
31、所述处理器,用于获取定位激光扫描设备对压力机滤板卸料的第一卸料状态,以及识别激光扫描设备对到达目标位置的所述滤板卸料的第二卸料状态;基于所述第一卸料状态与所述第二卸料状态确定所述滤板的参照堵料状态,并确定与所述参照堵料状态匹配的移动工位;在驱动所述压力机的移动云台伴随所述滤板按照所述移动工位进行移动后,更新所述第一卸料状态以及所述第二卸料状态,所述移动云台上配置有所述定位激光扫描设备以及所述识别激光扫描设备;若基于更新后的所述第一卸料状态以及所述第二卸料状态确定所述滤板的目标堵料状态,则生成所述压力机的堵料识别结果。
32、进一步地,所述定位激光扫描设备包括第一激光雷达设备以及至少两个角反射器,所述角反射器置于所述滤板边缘上,所述识别激光扫描设备包括第二激光雷达设备,所述第二激光雷达设备置于所述移动云台的边缘上,
33、所述处理器,还用于在所述第一激光雷达设备伴随所述移动云台移动过程中,采集所述第一激光雷达设备向所述角反射器发射定位射线,并在通过所述定位射线对所述滤板进行标定后,控制所述所述第一激光雷达设备扫描所述滤板卸料的第一卸料残余信号,确定所述第一卸料状态;当检测到滤板移动至目标位置时,则控制所述第二激光雷达设备扫描所述滤板卸料的第二卸料残余信号,并基于所述第二卸料残余信号确定所述第二卸料状态。
34、进一步地,所述处理器,还用于调取与所述目标位置匹配的卸料最大限值,其中,不同目标位置对应不同的卸料最大限值;若所述第一卸料残余信号匹配所述卸料最大限值,则将所述第一卸料残余信号与所述卸料最大限值的差值确定所述第一卸料状态;若所述第一卸料残余信号不匹配所述卸料最大限值,则将所述第一卸料残余信号确定所述第一卸料状态;
35、所述处理器,还用于基于已完成模型训练的卷积神经网络模型对所述第一卸料状态以及所述第二卸料状态进行堵料分类处理,确定所述参照堵料状态,所述卷积神经网络模型为基于带有不同堵料状态标签的卸料状态训练样本进行训练得到的;基于预设堵料移动复位映射关系确定与所述参照堵料状态匹配的移动工位,所述预设堵料移动复位映射关系中记录有与不同参照堵料状态对应的移动工位;
36、所述处理器,还用于计算更新后的所述第一卸料状态与更新后的所述第二卸料状态的差值;若所述差值大于卸料流动最大值,则生成卸料的目标堵料状态,所述卸料流动最大值为基于物料卸料流率确定的;若所述差值小于或等于所述卸料流动最大值,则将生成非堵料状态,并确定卸料反复移动所述移动云台的更新移动工位以及移动次数,以按照所述移动次数驱动所述移动云台按照所述更新移动工位进行移动;
37、所述处理器,还用于对更新后的所述第一卸料状态、所述第二卸料状态的数值矩阵进行正交求解,得到正交矩阵;基于预设堵料识别公式计算所述正交矩阵的堵料数值表征,所述预设堵料识别公式为若所述堵料数值表征大于物料堵料系数,则确定所述滤板处于目标堵料状态;若所述堵料数值表征小于或等于物料堵料系数,则确定所述滤板处于非堵料状态;
38、所述处理器,还用于在驱动所述压力机的移动云台伴随所述滤板按照所述移动工位进行移动过程中,实时采集所述移动工位的移动速度;若所述移动速度小于预设速度阈值,则确定所述移动平台为卡顿状态,生成平台卡顿预警信号。
39、借由上述技术方案,本发明实施例提供的技术方案至少具有下列优点:
40、本发明提供了一种压滤机的堵料识别方法及系统,与现有技术相比,本发明实施例通过获取定位激光扫描设备对压力机滤板卸料的第一卸料状态,以及识别激光扫描设备对到达目标位置的所述滤板卸料的第二卸料状态;基于所述第一卸料状态与所述第二卸料状态确定所述滤板的参照堵料状态,并确定与所述参照堵料状态匹配的移动工位;在驱动所述压力机的移动云台伴随所述滤板按照所述移动工位进行移动后,更新所述第一卸料状态以及所述第二卸料状态,所述移动云台上配置有所述定位激光扫描设备以及所述识别激光扫描设备;若基于更新后的所述第一卸料状态以及所述第二卸料状态确定所述滤板的目标堵料状态,则生成所述压力机的堵料识别结果,实现自动对滤板堵料进行识别,大大减少了人力资源消耗,从而提高对压滤机滤板堵料的准确识别,提高压滤机工作有效性。
41、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!