一种喷涂机器人的控制系统及控制方法与流程
本发明涉及喷涂机器人领域,尤其涉及一种喷涂机器人的控制系统及控制方法。
背景技术:
1、随着自动化机器人在现代工业制造业中的应用场景不断的扩展,喷涂作业的复杂作业环境以及高精度作业需求完美契合机器人的工作特征,喷涂机器人是一种通过电脑设备终端控制喷涂机器人的动作系统与喷涂系统在指定的区域位置进行喷涂,对于喷涂机器人的喷涂轨迹以及对各区域喷涂参数的设定受到相关领域技术人员越来越多的关注,通过喷涂机器人的硬件以及软件层面的更新迭代,对于喷涂机器人的相关改进愈发全面。
2、例如,中国专利:cn108435456a,该发明提供了一种工业机器人喷涂控制系统,用于对工业机器人的喷涂瑕疵进行识别和控制,包括:视频采集子系统,用于通过三个视频采集设备获得对工件内组装的部位进行视频采集,获得瑕疵检测数据,所述组装的部位是由机器人将不同工件组装后被组装的工件彼此相邻或相连接的位置;处理子系统,用于对检测数据进行减震和稳定化;状态检测识别子系统,用于对经过稳定化的数据进行组装瑕疵识别;控制子系统,用于根据状态检测识别子系统输出的识别信息调整工业机器人的喷涂角度和喷涂时间。
3、例如,中国专利:cn111389623a,该发明公开了一种自动喷涂机器人的控制系统及其控制方法,包括:三维扫描单元,用以现场扫描、采集空中积放链上产品外表面的形状及尺寸,并传输;计算单元,用以接收所述三维扫描单元的传输信号,进行三维模型的计算处理,并输出计算结果;喷涂单元,用以接收所述计算单元的计算结果,并根据计算结果对产品进行喷涂作业。
4、但是,现有技术中还存在以下问题,
5、现有技术中因为喷涂机器人常应用在工厂或施工环境下,环境复杂,可能会存在振动、抖动,尤其是在这种环境下对喷涂单元轨迹异常的检测精度不高,并且,振动的影响在喷头端会放大,影响喷涂效果和喷涂精度。
技术实现思路
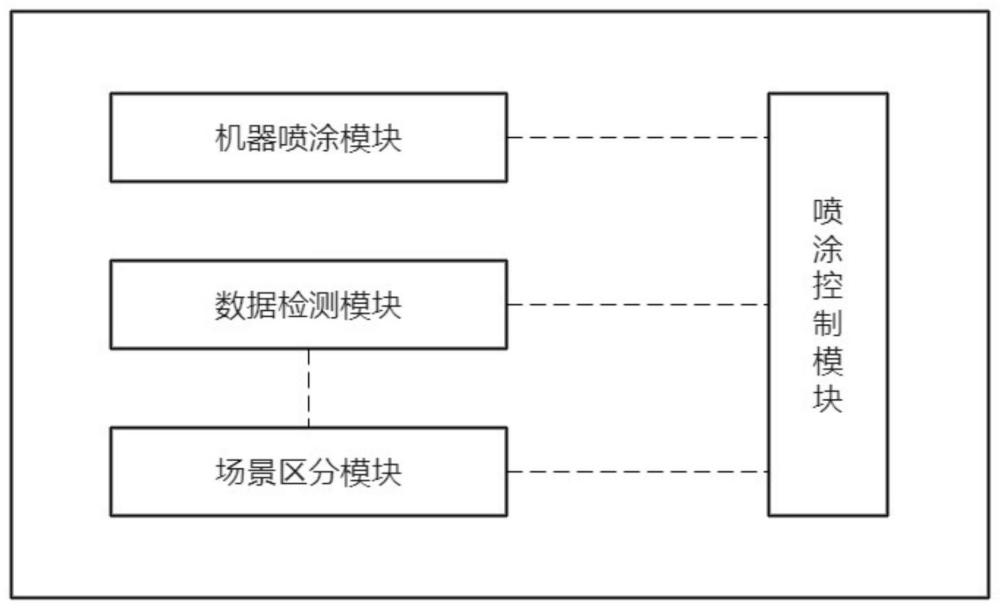
1、为解决现有技术中喷涂机器人常应用在工厂或施工环境下,环境复杂,可能会存在振动、抖动,尤其是在这种环境下对喷涂单元轨迹异常的检测精度不高,并且,振动的影响在喷头端会放大,影响喷涂效果和喷涂精度的问题,本发明提供一种喷涂机器人的控制系统,其包括:
2、机器喷涂模块,其包括机械臂以及设置在所述机械臂上的喷涂单元,以通过所述机械臂控制所述喷涂单元移动至对应的喷涂区域;
3、数据检测模块,其包括用以获取喷涂单元空间三维坐标的空间检测单元、设置在所述喷涂单元上用以检测喷涂单元移动速度的惯性传感器以及用以获取喷涂区域图像的图像采集单元;
4、场景区分模块,其与所述数据检测模块连接,用以根据喷涂单元轨迹扰动幅度以及轨迹平均曲率计算扰动表征参数,并根据所述扰动表征参数区分喷涂单元的工作场景;
5、喷涂控制模块,其分别与所述机器喷涂模块、数据检测模块以及场景区分模块连接,用以根据所述场景区分模块的区分结果选定对机器喷涂模块的控制方式,包括,
6、根据喷涂单元的实际轨迹与标准轨迹的偏移量判定机器喷涂模块是否存在异常,并修正机械臂的位姿;
7、或,根据喷涂单元实际轨迹点的坐标与预设的偏移范围坐标集合的对比结果判定是否需修正机器喷涂模块的运行参数,包括根据喷涂区域图像各部分的最大色度差异量修正喷涂单元的喷射力度以及喷涂单元的移动速度。
8、进一步地,所述场景区分模块构建喷涂单元的实际轨迹,并识别波动轨迹段,其中,
9、所述场景区分模块将所述实际轨迹切分为若干轨迹段,计算轨迹段中曲率半径最大点与轨迹段端点的平均距离,将所述平均距离确定为所述轨迹段的扰动幅度,将各轨迹段对应的扰动幅度平均值确定为轨迹扰动幅度。
10、进一步地,所述场景区分模块按照公式(1)计算扰动表征参数,
11、
12、公式(1)中,l表示轨迹扰动幅度,l0表示预设的轨迹扰动幅度标准值,s表示轨迹平均曲率,s0表示预设的轨迹平均曲率标准值,α表示扰动幅度权重值,β表示轨迹平均曲率权重值。
13、进一步地,所述场景区分模块区分喷涂单元的工作场景,其中,
14、所述场景区分模块将所述扰动表征参数与预设的扰动表征阈值进行对比,
15、若所述扰动表征参数大于或等于所述扰动表征阈值,则所述场景区分模块区分所述喷涂单元处于扰动工作场景;
16、若所述扰动表征参数小于所述扰动表征阈值,则所述场景区分模块区分所述喷涂单元处于非扰动工作场景。
17、进一步地,所述喷涂控制模块还用以根据所述场景区分模块的区分结果选定对机器喷涂模块的控制方式,其中,
18、若区分结果为所述喷涂单元处于非扰动工作场景,则所述喷涂控制模块根据喷涂单元的实际轨迹与标准轨迹的偏移量判定机器喷涂模块是否存在异常,并修正机械臂的位姿
19、若区分结果为所述喷涂单元处于扰动工作场景,则所述喷涂控制模块根据喷涂单元实际轨迹点的坐标与预设的偏移范围坐标集合的对比结果判定是否需修正机器喷涂模块的运行参数。
20、进一步地,所述喷涂控制模块将实际轨迹的偏移量与预设的偏移量阈值进行对比判定机器喷涂模块是否存在异常,
21、若所述偏移量大于预设的偏移量阈值,则所述喷涂控制模块判定所述机器喷涂模块存在异常。
22、进一步地,所述喷涂控制模块还用以构建偏移坐标集合,其中,
23、所述喷涂控制模块获取所述标准轨迹中各轨迹点的空间三维坐标,并逐个确定各所述轨迹点的关联三维坐标,将已确定的关联三维坐标存储后得到偏移坐标集合,所述关联三维坐标为与轨迹点的距离处于预定距离范围内的空间三维坐标。
24、进一步地,所述喷涂控制模块将喷涂单元实际轨迹坐标与偏移坐标集合进行对比,以根据对比结果判定是否需修正机器喷涂模块的运行参数,其中,
25、若所述喷涂单元实际轨迹坐标与偏移坐标集合中的任意空间三维坐标相同,则所述喷涂控制模块判定需修正机器喷涂模块的运行参数。
26、进一步地,所述喷涂控制模块修正喷涂单元的喷射力度以及喷涂单元的移动速度包括,
27、增大所述喷涂单元的喷射力度,喷射力度增大量与所述最大色度差异量呈正相关;
28、增大所述喷涂单元的移动速度,移动速度增大量与所述最大色度差异量呈正相关。
29、进一步地,还提供一种应用于控制系统的方法,其包括,预先获取喷涂目标的位置数据,并针对位置数据配置机器喷涂模块的运行参数,包括,设定喷涂单元的标准轨迹,以使机械臂能带动所述喷涂单元以所述标准轨迹移动。
30、与现有技术相比,本发明通过设置机器喷涂模块、数据检测模块、场景区分模块以及喷涂控制模块,机械喷涂模块包括机械臂以及设置在所述机械臂上的喷涂单元,实现自动化对目标区域进行喷涂,数据检测模块用以获取相关检测参数,场景区分模块能根据喷涂单元轨迹扰动幅度以及轨迹平均曲率计算扰动表征参数并区分喷涂单元的工作场景,喷涂控制模块根据所述场景区分模块的区分结果选定对机器喷涂模块的控制方式,本发明通过上述过程考虑受到外界环境影响喷涂单元在扰动情况下的偏移检测方式,并适应性调整喷涂单元的运行参数,提高对喷涂机器人运行过程中喷涂单元轨迹异常的检测精度,保证喷涂效果和喷涂精度。
31、尤其,本发明区分喷涂单元的工作场景,区分依据为计算扰动表征参数,在实际情况中,喷涂单元按照预定的标准轨迹移动,由于目标物体存在差异,因此标准轨迹是多样的,尤其是标准轨迹较为复杂时,由于喷涂单元受外接环境影响较大,叠加外界影响导致喷涂单元的实际轨迹出现扰动,通过扰动表征参数表征上述现象,划分喷涂单元的工作场景,为后续自动化的设定机器喷涂模块的控制方式提供数据支持,进而提高对喷涂机器人运行过程中喷涂单元轨迹异常的检测精度,保证喷涂效果和喷涂精度。
32、尤其,本发明在扰动环境下考虑设定偏移范围坐标集合,在实际情况中,由于外界环境带来的喷涂单元的扰动,采用轨迹对比的形式容易造成误判,因此本发明设定以标准轨迹为基准的偏移范围坐标集合,考虑原有标准轨迹的基础上扰动在预定范围内接口,减少对轨迹偏移的误判,并且,在扰动较大时识别喷涂区域图像各部分的最大色度差异量,通过图像识别扰动对实际喷涂带来的影响,色度差异量在一定程度上标准了喷涂不均的情况,进而,适应性的增大喷涂单元的喷涂力度增强涂层的覆盖能力,增大喷涂单元的喷涂速度减少涂料的堆积,减少抖动对涂层均匀性的影响,保证喷涂机器人运行过程实际轨迹异常的检测精度,证喷涂效果和喷涂精度。
33、尤其,本发明在非扰动环境下,通过轨迹对比的方式判定机器喷涂模块是否存在异常,并修正机械臂的位姿,在非扰动环境下,通过轨迹对比的方式识别机器喷涂模块是否存在异常,精度较高,保证喷涂机器人运行过程中喷涂单元轨迹异常的检测精度,及时修正,保证喷涂效果和喷涂精度。
- 还没有人留言评论。精彩留言会获得点赞!