基于三轴活动式的模组自动化涂胶装置的制作方法
本技术涉及涂胶装置,具体为基于三轴活动式的模组自动化涂胶装置。
背景技术:
1、在模组振动试验预处理过程中,常需对模组进行涂胶处理,以便加强模组样品与夹具之间的粘合、或对模组样品进行一定程度垫高以达到模组底部与夹具垫块平齐使得模组在振动过程中保护模组底部、或对模组进行散热的要求。通常使用的胶多为半固体,常规工具很难将胶规整的涂覆在规定区域并达到垂直涂覆厚度的要求,费时费力,增加工作成本,降低了工作效率,且精度不高,误差较大。
技术实现思路
1、本实用新型的目的在于提供一种基于三轴活动式的模组自动化涂胶装置,以解决上述背景技术中提出的装置通常使用的胶多为半固体,常规工具很难将胶规整的涂覆在规定区域并达到垂直涂覆厚度的要求,费时费力,增加工作成本,降低了工作效率,且精度不高,误差较大。
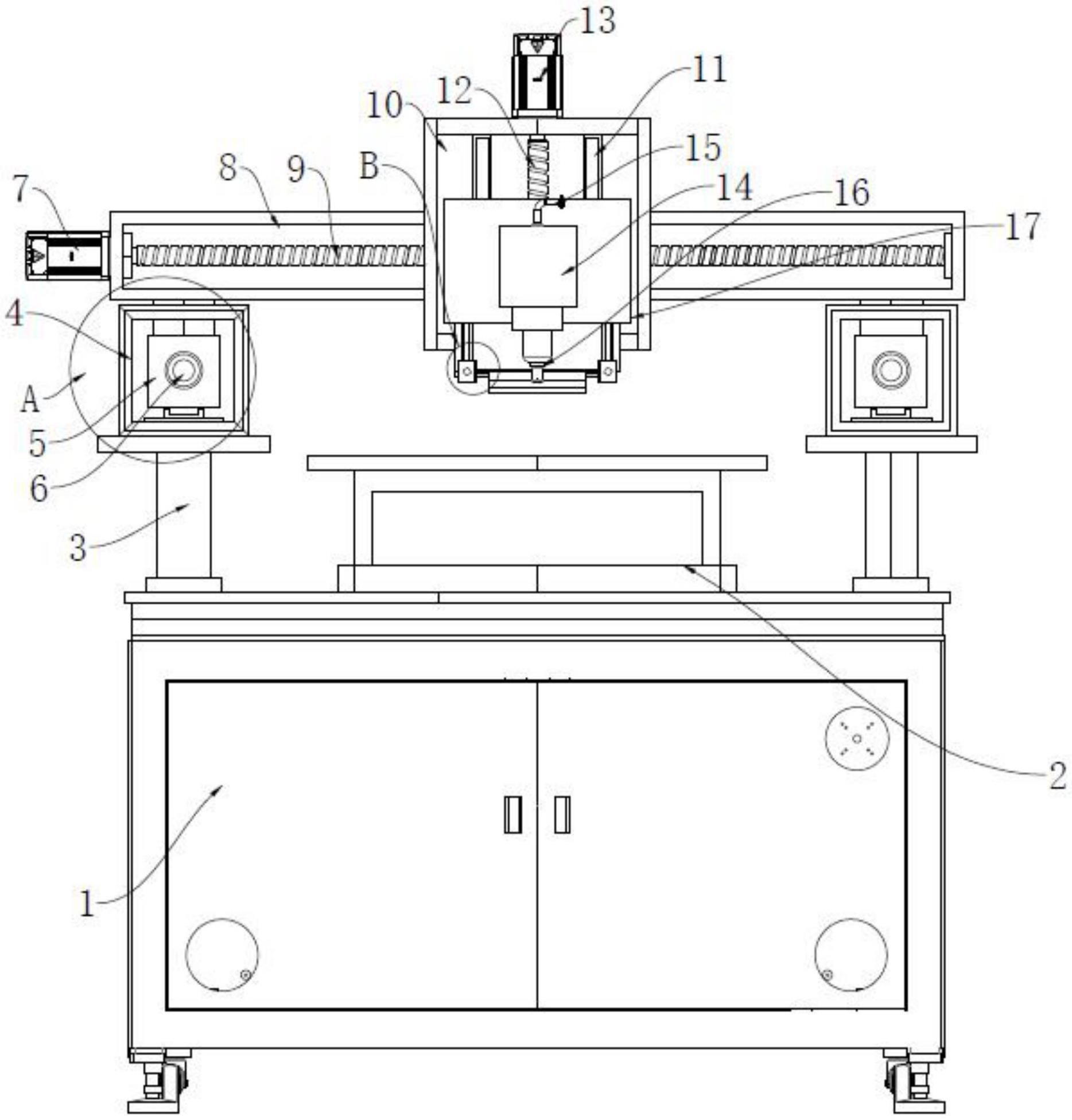
2、为实现上述目的,本实用新型提供如下技术方案:基于三轴活动式的模组自动化涂胶装置,包括主机体、支撑柱、y轴模组和x轴模组,所述主机体顶部的两侧固定有支撑柱,所述支撑柱的顶部固定有y轴模组,所述y轴模组的内部活动设置有第一丝杠,所述支撑柱上活动设置有滑块,所述滑块的顶部穿过y轴模组并连接有x轴模组,所述x轴模组前部开设有凹槽,所述x轴模组内部活动设置有第二丝杠,所述第二丝杠上通过限位套筒穿过x轴模组中的凹槽并连接有z轴模组,所述z轴模组的中心位置活动设置有第三丝杠,所述第三丝杠上活动设置有滑板,所述z轴模组顶部固定有第二舵机,所述第二舵机的输出端与第三丝杠的一端相互连接,所述x轴模组外部的一侧固定有第一舵机,所述第一舵机的输出端与第二丝杠的一端相互连接,所述y轴模组的背部固定有第三舵机,所述第三舵机的输出端与第一丝杠的一端相互连接。
3、优选的,所述y轴模组内部的底部固定有限位槽,所述限位槽的顶部滑动设置有限位块,所述限位块的顶部与滑块的底部相互连接。
4、优选的,所述主机体顶部的中心位置固定有工作台,所述工作台的截面呈现矩形。
5、优选的,所述z轴模组外部的前部滑动设置有第一滑轨,所述第一滑轨与滑板相互滑动连接。
6、优选的,所述滑板前部固定有固定件,所述固定件中固定有涂胶喷头,所述涂胶喷头的顶部连接有进胶管,所述进胶管延伸到固定件的外部。
7、优选的,所述滑板底部的外部固定有限位轨,所述限位轨上滑动设置有滑套,所述滑套中设置有连接轴,所述连接轴上固定有刮板,所述滑套外部活动设置有调节螺栓,所述调节螺栓穿过连接轴并与限位轨相互接触,所述刮板设置到涂胶喷头的背部。
8、与现有技术相比,本实用新型的有益效果是:该基于三轴活动式的模组自动化涂胶装置结构合理,具有以下优点:
9、(1)通过设置有滑块、第一丝杠、第一舵机、x轴模组、第二丝杠、第三丝杠和第二舵机实现了装置精度高,涂覆区域更加精确,因此,使用时,通过采用舵机驱动丝杠,精度可达0.1mm,有效避免人工调节时出现误差情况,涂覆区域更精确。
10、(2)通过设置有滑板、滑套、刮板、调节螺栓和连接轴可以调节涂覆垂直高度,因此,通过转动调节螺栓,调节螺栓可以使滑套在限位轨上松动,然后移动限位轨,限位轨使连接轴带动刮板进行上下移动,刮板升起下边缘高于涂覆垂直高度,即可应对涂胶后不需抹平动作的涂覆需求,大大降低非常规涂覆需求对人力技术的需求及效率成本。
11、(3)挡板可拆卸,实现随时清洗及更换,降低成本,预防挡板磨损后精度下降情况,涂胶喷头可按需求设定吞吐速率,按设定的涂覆区域进行网格状涂胶,刮板可以前后移动,对胶进行抹平动作,有效节省人力成本,提高工作效率及精度需求。
技术特征:
1.基于三轴活动式的模组自动化涂胶装置,其特征在于:包括主机体(1)、支撑柱(3)、y轴模组(4)和x轴模组(8),所述主机体(1)顶部的两侧固定有支撑柱(3),所述支撑柱(3)的顶部固定有y轴模组(4),所述y轴模组(4)的内部活动设置有第一丝杠(6),所述支撑柱(3)上活动设置有滑块(5),所述滑块(5)的顶部穿过y轴模组(4)并连接有x轴模组(8),所述x轴模组(8)前部开设有凹槽,所述x轴模组(8)内部活动设置有第二丝杠(9),所述第二丝杠(9)上通过限位套筒穿过x轴模组(8)中的凹槽并连接有z轴模组(10),所述z轴模组(10)的中心位置活动设置有第三丝杠(12),所述第三丝杠(12)上活动设置有滑板(17),所述z轴模组(10)顶部固定有第二舵机(13),所述第二舵机(13)的输出端与第三丝杠(12)的一端相互连接,所述x轴模组(8)外部的一侧固定有第一舵机(7),所述第一舵机(7)的输出端与第二丝杠(9)的一端相互连接,所述y轴模组(4)的背部固定有第三舵机(18),所述第三舵机(18)的输出端与第一丝杠(6)的一端相互连接。
2.根据权利要求1所述的基于三轴活动式的模组自动化涂胶装置,其特征在于:所述y轴模组(4)内部的底部固定有限位槽(20),所述限位槽(20)的顶部滑动设置有限位块(19),所述限位块(19)的顶部与滑块(5)的底部相互连接。
3.根据权利要求1所述的基于三轴活动式的模组自动化涂胶装置,其特征在于:所述主机体(1)顶部的中心位置固定有工作台(2),所述工作台(2)的截面呈现矩形。
4.根据权利要求1所述的基于三轴活动式的模组自动化涂胶装置,其特征在于:所述z轴模组(10)外部的前部滑动设置有第一滑轨(11),所述第一滑轨(11)与滑板(17)相互滑动连接。
5.根据权利要求4所述的基于三轴活动式的模组自动化涂胶装置,其特征在于:所述滑板(17)前部固定有固定件(14),所述固定件(14)中固定有涂胶喷头(16),所述涂胶喷头(16)的顶部连接有进胶管(15),所述进胶管(15)延伸到固定件(14)的外部。
6.根据权利要求5所述的基于三轴活动式的模组自动化涂胶装置,其特征在于:所述滑板(17)底部的外部固定有限位轨(25),所述限位轨(25)上滑动设置有滑套(21),所述滑套(21)中设置有连接轴(24),所述连接轴(24)上固定有刮板(22),所述滑套(21)外部活动设置有调节螺栓(23),所述调节螺栓(23)穿过连接轴(24)并与限位轨(25)相互接触,所述刮板(22)设置到涂胶喷头(16)的背部。
技术总结
本技术公开了基于三轴活动式的模组自动化涂胶装置,包括主机体、支撑柱、Y轴模组和X轴模组,主机体顶部的两侧固定有支撑柱,支撑柱的顶部固定有Y轴模组,Y轴模组的内部活动设置有第一丝杠,支撑柱上活动设置有滑块,滑块的顶部穿过Y轴模组并连接有X轴模组,X轴模组前部开设有凹槽,X轴模组内部活动设置有第二丝杠,第二丝杠上通过限位套筒穿过X轴模组中的凹槽并连接有Z轴模组,Z轴模组的中心位置活动设置有第三丝杠,第三丝杠上活动设置有滑板。本技术通过采用舵机驱动丝杠,精度可达0.1mm,有效避免人工调节时出现误差情况,涂覆区域更精确。
技术研发人员:牛秦川,王晶,黄钰瓶,王铭
受保护的技术使用者:宁德新能先锋检测科技有限公司
技术研发日:20230228
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!