喷涂设备和相关的具有所需喷涂剂的量的仿真的操作方法与流程
本发明涉及一种喷涂设备,用于以喷涂剂喷涂部件,特别是以涂料涂装机动车车身部件。此外,本发明还涉及这种喷涂设备的相应操作方法。
背景技术:
1、在用于喷涂机动车车身部件的现代喷涂系统中,通常使用由喷涂机器人引导的旋转雾化器作为施加装置。喷涂机器人布置在喷涂室中,待喷涂的车身部件由传送装置送入喷涂室,然后在喷涂室中进行喷涂。
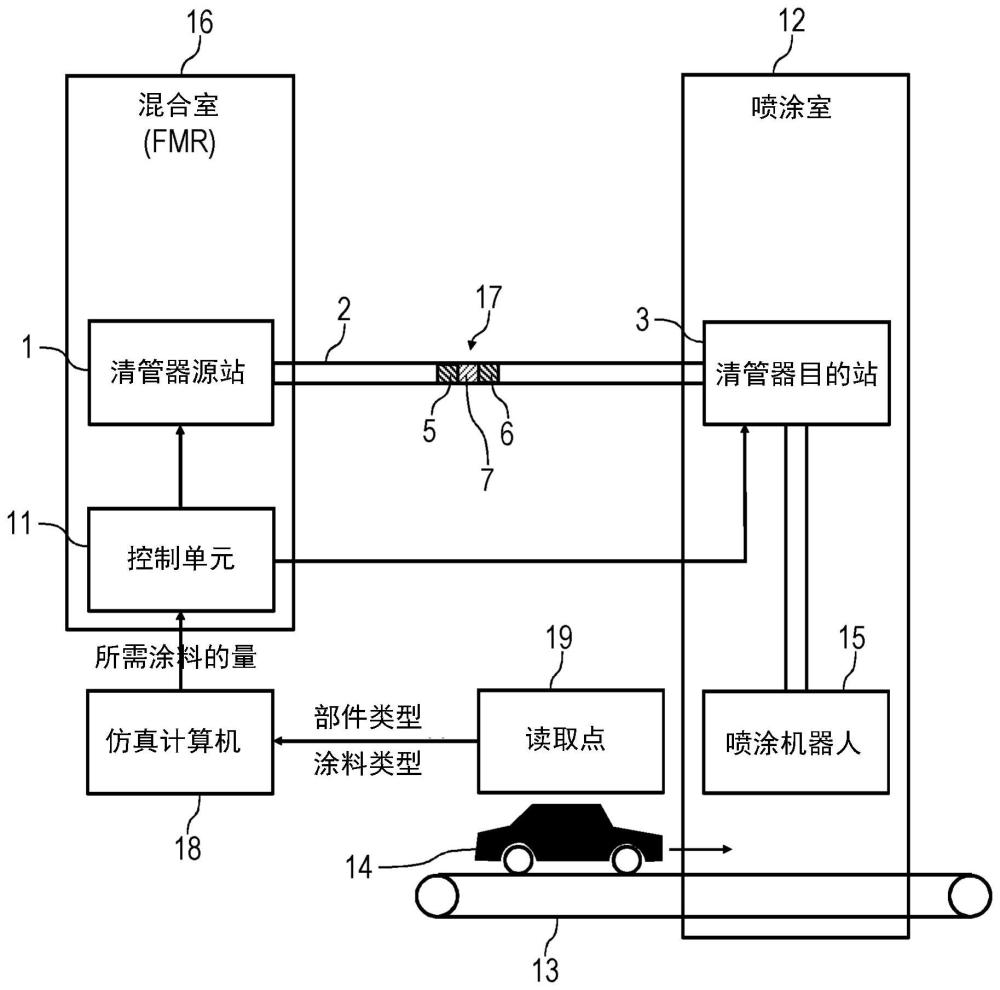
2、待施加的涂料由涂料供应装置提供,并通过清管器管线输送到喷涂室中相应的机器人站。为此,首先要确定所需的涂料的量,这取决于待喷涂的汽车车身部件类型以及待施加的涂料类型。然后,所需量的涂料由涂料供应装置在清管器源站注入清管器管线,并由清管器套组沿清管器管线输送至相应机器人站处的清管器目的站。在那里,涂料被从清管器套组中取出,用于喷涂相应的机动车车身。然后,在所谓的回流过程中,残留在清管器套组中的涂料会沿着清管器管线被输送回清管器源站。在那里,所谓的回流涂料可以再次从清管器套组中取出,从而实现涂料的循环利用。
3、这种喷涂系统的问题在于确定所需的喷涂剂的量,然后将所需量的喷涂剂注入清管器套组,并通过清管器管线输送到机器人站。上文已经提到,所需涂料的量取决于部件类型和涂料类型。然而,由于所使用的部件类型和涂料类型都非常多,要在分配表中记录所有部件类型和涂料类型组合所需的涂料的量几乎是不可能的。因此,在喷涂过程中需要进行大量的维护工作,以便及时更新这些分配表,例如在需要输入新的涂料类型或新的部件类型时。
4、因此,在喷涂操作过程中,填充清管器套组的涂料的量可能与实际需要的涂料的量不完全一致。与所需的涂料的量相比,填入清管器套组的涂料的量的波动实际上也会导致回流过程中清管器套组移动速度的相应波动,因为清管器套组在清管器管线中的移动阻力取决于填充的涂料的量。因此,在回流过程中,应将一定量的涂料尽可能恒定地返回到清管器套组中,以便在回流运动过程中尽可能精确地保持规定的清管速度。因此,与实际所需的涂料量相比,进入清管器套组的涂料的量的波动会导致回流过程中清管速度的相应波动。然而,由于各种原因,回流过程中清管速度的这种波动是不可取的。例如,在极端情况下,过高的清管速度会导致清管器损坏,而过低的清管速度则会导致循环时间的损失,即回流过程过慢。
5、此外,关于本发明的技术背景,还应参考ep1837726a1、ep1270083a1、us2006/0086407a1、ep1380350a1、de10120272a1和de10136328a1。
技术实现思路
1、因此,本发明的任务是解决上述问题,即根据喷涂剂类型和部件类型,尽可能准确地确定所需的喷涂剂的量。
2、根据独立权利要求的本发明的喷涂设备或根据从属权利要求的相应的操作方法可以解决这一问题。
3、本发明包括在仿真框架内根据相应的喷涂剂类型和相应的部件类型确定部件喷涂所需的喷涂剂的量的一般技术教学,下文将详细说明。
4、首先,按照开头所述的已知喷涂设备,根据本发明的喷涂设备至少包括喷涂站(例如喷涂室),该喷涂站带有机器人站,在该机器人站中布置有喷涂机器人,以便以喷涂剂喷涂部件。
5、在本发明的一个优选实施例中,喷涂站是喷涂室,除了入口和/或出口外,喷涂室的壁基本上是封闭的。然而,就喷涂站而言,本发明并不局限于基本封闭的喷涂室,也可以实施例如仅在功能上封闭而非空间上封闭的喷涂站。
6、此外,应该指出的是,本发明在待喷涂的部件方面并不局限于机动车车身部件。相反,本发明的概念也适用于喷涂其它类型的部件。
7、此外,还应该提到的是,本发明在喷涂剂的应用上并不局限于涂料。例如,喷涂剂也可以是粘合剂、绝缘材料或密封剂等。
8、在本发明的优选实施例中,喷涂机器人承载旋转雾化器作为施加装置。不过,就所使用的施加装置而言,本发明也并不局限于旋转雾化器。例如,现有技术中已知的空气雾化器或所谓的打印头也可用作施加装置。
9、此外,按照开头所述的已知喷涂设备,根据本发明的喷涂设备还包括传送装置,用于将待喷涂的部件输送到喷涂站,然后再从喷涂站输送出来。这种类型的传送装置在用于喷涂机动车车身部件的传统喷涂系统中本身就是已知的,因此无需详细描述。
10、此外,按照开头所述的已知喷涂设备,根据本发明的喷涂设备包括信息源,该信息源提供分配给被输送到喷涂站的部件的部件标识符,部件标识符反映了由传送装置输送到喷涂站的部件的部件类型,以及待施加到相应部件上的喷涂剂的喷涂剂类型。
11、在本发明的优选实施例中,该信息源是读取点,它相对于传送装置而言位于喷涂站上游,特别是位于喷涂站的入口处,这在传统的机动车车身部件涂装系统中是已知的。这个读取点可以读出部件或部件载体(“滑垫”)上的部件识别器,读取过程优选地是无线的。例如,可以通过rfid(射频识别)、条形码、光屏障矩阵或电感式传感器等方式进行读取。
12、替代地,也可以使用生产控制系统作为信息源,其提供分配给被输送的部件的部件标识符。例如,涂装车间的生产控制系统知道每次送入的机动车车身部件的部件类型,也知道待施加的涂料的涂料类型。在这种情况下,不需要真正的读取点,因为生产控制系统提供了虚拟读取点。
13、此外,按照开头所述的已知喷涂设备,根据本发明的喷涂设备包括涂料供应装置,用于以用于喷涂相应部件所需的特定的喷涂剂的量提供待施加的喷涂剂,该特定的喷涂剂的量是根据相应部件类型和喷涂剂类型确定的。在实践中,这种涂料供应装置通常安装在所谓的涂料混合室中,该涂料混合室在空间上远离喷涂室。
14、此外,根据本发明的喷涂装置还包括位于涂料供应装置处的清管器源站和位于喷涂站中相应机器人站处的清管器目的站,清管器源站通过清管器管线与清管器目的站相连,以便将在机器人站处喷涂部件所需的涂料的量从涂料供应装置通过清管器管线输送到机器人站。
15、涂料供应装置由涂料供应控制器控制,该涂料供应控制器指定所需的涂料的量,然后将涂料在清管器源站处填充到清管器管线中。
16、本发明与上述喷涂设备的区别在于,本发明提供了仿真计算机,用于仿真相应部件的喷涂过程。在仿真过程中,仿真计算机会考虑到信息源提供的具有部件类型和喷涂剂类型的部件标识符。然后,仿真计算机根据部件类型和喷涂剂类型计算喷涂所需的喷涂剂的量,并将仿真过程中确定的所需喷涂剂的量的值提供给涂料供应控制器。然后,涂料供应控制器控制涂料供应装置,将先前确定的所需涂料的量准确地注入清管器管线。在此需要指出的是,除了所需的喷涂剂的量外,还可以将回流的量注入清管器套组中,回流的量可确保清管器套组在回流过程中不会在干燥的情况下移动。
17、在实际操作中,仿真计算机和涂料供应控制器之间的通信可能无法正常工作,因此仿真计算机在仿真过程中确定的所需喷涂剂的量无法传输到涂料供应控制器。在这种情况下,涂料供应控制器可以限定所需的涂料的量的标准量,这样清管器源站就可以以标准量的涂料填充清管器管线。
18、替代地,涂料供应控制器也可以具有涂料量存储器,在其中存储有不同部件类型和不同喷涂剂类型在各种情况下分别所需的标准量。如果从仿真计算机接收到的所需喷涂剂的量出现故障,涂料供应控制器就可以根据部件类型和喷涂剂类型从涂料量存储器中读出标准量,这样清管器源站就可以以读出的标准量填充清管器管线。如果仿真计算机和涂料供应控制器之间的通信出现故障,根据本发明的喷涂设备就会以类似于开头所述的众所周知的喷涂系统的方式运行,在这种情况下,必须以一种耗时的方式来维护分配表,分配表一方面包含部件类型和喷涂剂类型之间的分配,另一方面包含所需的喷涂剂的量。
19、此外,在本发明的范围内,仿真计算机还可以为每个部件存储数据记录,以供日后评估,其中数据记录包括以下数据:
20、-待喷涂的部件的部件类型;
21、-待施加的喷涂剂的喷涂剂类型;以及
22、-喷涂部件所需的喷涂剂的量,所需喷涂剂的量由仿真计算机确定。
23、上文已经提到,所需的喷涂剂的量从涂料供应装置处的清管器源站输送到机器人站处的清管器目的站。为此,将所需的喷涂剂装入清管器管线中的清管器套组中,清管器套组由两只清管器组成,两只清管器之间填充有所需的喷涂剂。然后,清管器源站将填充有所需量的喷涂剂的清管器套组沿着清管器管线输送到清管器目的站,在那里可以从清管器套组中取出所需量的喷涂剂。
24、部件喷涂结束后,通常会有一定量的喷涂剂残留在清管器套组中,可用于所谓的回流过程。因此,在部件喷涂完成后,清管器套组从清管器目的站返送回清管器源站,清管器套组中仍有一定量的喷涂剂。由于清管器套组在清管器管线中的摩擦力也取决于清管器套组中的喷涂剂的量,因此清管器套组的这种返回运动不应是空的,即清管器套组中没有填充任何喷涂剂。此外,在回流过程中,清管器套组的返回运动也不应在清管器套组中填充过多喷涂剂的情况下发生。因此,在回流过程中,应尽可能在清管器套组中注入精确限定的喷涂剂,因为喷涂剂的量也会影响清管器套组返回清管器源站的速度。在回流过程中,清管器套组的移动速度过快会导致清管器损坏。另一方面,如果清管器套组在回流过程中移动速度太慢,则会浪费周期时间,即整个过程会减慢。
25、根据本发明对所需喷涂剂的量的计算,现在可以使回流过程中残留在清管器套组中的喷涂剂的量几乎保持恒定,这也导致清管器套组在回流过程中的移动速度相应保持恒定。因此,清管器套组从清管器目的站返回清管器源站时的返回速度在很大程度上与喷涂剂类型和部件类型无关,与类型有关的偏差最大限制为30%、90%、10%或甚至5%。同样,在回流过程中,喷涂剂的返回量也可以基本保持不变,与类型有关的偏差最多不超过30%、90%、10%或甚至5%。
26、清管器套组在清管器源站和清管器目的站之间的移动可以通过传统方式完成,即将压缩空气引入清管器管线,分别将清管器套组推向清管器源站和清管器目的站。
27、此外,应该提到的是,机器人站可以具有控制机器人站的操作的站控制器。根据本发明,上述仿真计算机可以选择性地集成到站控制器或涂料供应控制器中。
28、除了上述根据本发明设计的喷涂设备外,本发明还包括用于这种喷涂设备的相应操作方法。根据本发明的操作方法的各个过程步骤已经从上述对根据本发明的喷涂设备的描述中显而易见,因此可以省去对各个过程步骤的单独描述。
29、本发明的其它有利的进一步实施例在从属权利要求中指出,或在下文中结合本发明优选实施例的描述参照附图进行更详细的解释。
- 还没有人留言评论。精彩留言会获得点赞!