一种AI人工智能轨迹喷漆系统的制作方法
本发明涉及喷漆,具体涉及一种ai人工智能轨迹喷漆系统。
背景技术:
1、中国专利cn110090756a公开了一种吊式旋转航标自动喷漆系统。吊式旋转航标自动喷漆系统包括喷漆房、起吊装置、旋转装置、油漆喷涂装置以及控制装置;喷漆房内形成有用于容纳航标的操作空间;起吊装置可移动地安装于框架的顶部,用于起吊航标;油漆喷涂装置包括安装于喷漆房内的多个喷头;旋转装置安装于喷漆房内,用于驱动航标转动;控制装置用于控制起吊装置、油漆喷涂装置以及旋转装置动作;
2、现有技术中,通过移动机构输送喷漆头等喷涂设备进行移动,对工件完成喷涂时,其会存在在某一轨道节段内,出现位置偏移异常情况,将会影响到该区域工件喷漆的质量,使得工件表面的喷漆出现不均匀,与预期的喷漆工艺具有较大差异的问题。
技术实现思路
1、本发明的目的在于提供一种ai人工智能轨迹喷漆系统,解决以下技术问题:通过移动机构输送喷漆头等喷涂设备进行移动,对工件完成喷涂时,其会存在在某一轨道节段内,出现位置偏移异常情况,将会影响到该区域工件喷漆的质量,使得工件表面的喷漆出现不均匀,与预期的喷漆工艺具有较大差异的问题。
2、本发明的目的可以通过以下技术方案实现:
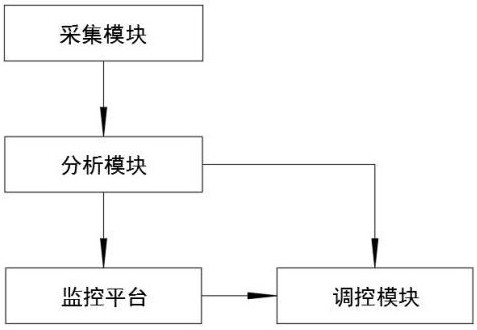
3、一种ai人工智能轨迹喷漆系统,包括:
4、采集模块,基于视觉相机,获取到喷漆设备的运行数据;其中,运行数据包括中心坐标值、到点时间和离点时间;
5、分析模块,获取到每个监测点的中心坐标值、到点时间和离点时间,将中心坐标值与预设的标准中心坐标值进行比较,得到偏离距离;
6、将得到的偏离距离与偏离距离阈值进行比较;
7、若偏离距离大于等于偏离距离阈值时,生成监测点喷涂异常信号;
8、当得到监测点喷涂异常信号时,将该监测点标记分析点,并沿着喷漆运行轨迹位于分析点的上一个监测点,标记为参数点;获取到分析点的中心坐标值和参照点的坐标值,以及参数点的离点时间和分析点的到点时间;
9、将分析点与参照点连线,标记为偏移线段,获取到偏移线段的长度,标记为偏移线长lp,将参数点的离点时间与分析点的到点时间做差值计算,得到偏移时差cs;
10、将得到的偏移线长lp和偏移时差cs,代入到公式中,得到偏离值zp;其中,a1、a2均为权重系数;
11、监控平台,获取到偏离值,将偏离值zp与偏离阈值进行比较;
12、若偏离值zp大于等于偏离阈值时,则生成运行故障信号;若偏离值zp小于偏离阈值时,则生成运行调控信号。
13、作为本发明进一步的方案:在采集模块中,获取到喷漆设备到达每个监测点的时间和喷漆设备离开每个监测点的时间,并标记为到点时间和离点时间。
14、作为本发明进一步的方案:若偏离距离小于偏离距离阈值时,生成监测点喷涂正常信号。
15、作为本发明进一步的方案:还包括:
16、调控模块,基于运行调控信号,获取到分析模块的参照点和分析点,并以参照点为原点,参照点与分析点之间的距离为x轴坐标系,以喷涂设备的实时移速为y轴,构建二维坐标系,将得到偏移线长中喷涂设备的实时移速代入到二维坐标系中,绘制到实时移速曲线,将实时移速曲线与预设的标准移速曲线进行比较,得到最大移速偏差值、最小移速偏差值、平均移速偏差值,并分别标记为zpd、zpx和zpj,将得到的最大移速偏差值zpv、最小移速偏差值zpx、平均移速偏差值zpj,代入到公式中,计算得到调整系数xt;其中,b1、b2、b3均为比例系数;
17、将得到的调整系数xt,代入到公式中,计算得到喷涂设备的实时调整移速vt;其中,vs为偏移线长中喷涂设备的实时移速。
18、作为本发明进一步的方案:最大移速偏差值zpv的获取方式为:
19、将最大移速的距离值与标准最大移速的距离值做差值计算,得到最大移速距离差值;将最大移速的时间值与标准最大移速的时间值做差值计算,得到最大移速时间差值;
20、将最大移速距离差值除以最大移速时间差值,得到最大移速偏差值zpv。
21、作为本发明进一步的方案:获取到实时移速曲线的最大移速值所对应的距离值,标记为最大移速的距离值,以及最大移速的距离值所对应的时间,标记为最大移速的时间值;
22、再获取到预设的标准移速曲线的最大移速值所对应的距离值,标记为标准最大移速的距离值,以及标准最大移速的距离值所对应的时间,标记为标准最大移速的时间值。
23、作为本发明进一步的方案:最小移速偏差值zpx的获取方式为:
24、将最小移速的距离值与标准最小移速的距离值做差值计算,得到最小移速距离差值;将最小移速的时间值与标准最小移速的时间值做差值计算,得到最小移速时间差值;
25、将最小移速距离差值除以最小移速时间差值,得到最小移速偏差值zpx。
26、作为本发明进一步的方案:获取到实时移速曲线的最小移速值所对应的距离值,标记为最小移速的距离值,以及最小移速的距离值所对应的时间,标记为最小移速的时间值;
27、再获取到预设的标准移速曲线的最小移速值所对应的距离值,标记为标准最小移速的距离值,以及标准最小移速的距离值所对应的时间,标记为标准最小移速的时间值。
28、作为本发明进一步的方案:平均移速偏差值zpj的获取方式为:
29、将平均移速的距离值与标准平均移速的距离值做差值计算,得到平均移速距离差值;将平均移速的时间值与标准平均移速的时间值做差值计算,得到平均移速时间差值;
30、将平均移速距离差值除以平均移速时间差值,得到平均移速偏差值zpx。
31、作为本发明进一步的方案:首先根据实时移速曲线,分别确定实时移速曲线所对应的平均移速,标记为实时平均移速,根据预设的标准移速曲线,分别确定预设的标准移速曲线所对应的平均移速,标记为预设平均移速;
32、获取到实时移速曲线的实时平均移速所对应的距离值,标记为实时平均移速的距离值,以及实时平均移速的距离值所对应的时间,标记为实时平均移速的时间值;
33、再获取到预设的标准移速曲线的预设平均移速所对应的距离值,标记为标准平均移速的距离值,以及标准平均移速的距离值所对应的时间,标记为标准平均移速的时间值。
34、本发明的有益效果:
35、本发明通过采集模块,基于视觉相机,获取到喷漆设备的运行数据,分析模块,基于喷漆设备的运行数据,计算分析得到偏离值,基于偏离值,对运行轨迹偏离程度进行判断,得到轨迹处理信号,本发明先对喷涂轨迹进行监测点分析判断,再以此为基点,进行线段分析判断,实现由点到段进行偏移分析,不仅监控喷涂设备偏移程度,还监控喷涂设备偏移路径稳定程度;
36、本发明通过基于运行调控信号,获取到偏移线长中喷涂设备的实时移速,进行分析,得到喷涂设备的实时调整移速vt,本发明通过对喷涂设备实时移速与标准移速进行差值分析,得到喷涂设备的调整移速,从而使得喷涂设备在进行移动喷涂时,可以进行实时调整喷涂设备的移速,保证喷涂设备可以更加精准地按照预设工艺要求完成移动喷涂工作,从而有效保证喷涂质量。
- 还没有人留言评论。精彩留言会获得点赞!