LED灯剥料检测机构及检测方法与流程
led灯剥料检测机构及检测方法
技术领域
1.本发明涉及led灯制造设备技术领域,具体为led灯剥料检测机构及检测方法。
背景技术:
2.led灯是一块电致发光的半导体材料芯片,用银胶或白胶固化到支架上,然后用银线或金线连接芯片和电路板,四周用环氧树脂密封,起到保护内部芯线的作用,最后安装外壳,所以led灯的抗震性能好。led的应用越来越广泛,使用量也越来越大。led照明能够应用到高亮度领域归功于led芯片生产技术的不断提高,包括单颗晶片的功率和亮度的提高,生产出高亮度led芯片,一直是世界各国全力投入研制的目标,也是led发的方向,目前,利用大功率芯片生产出来的白光1w led其流明值已经达能到150lm之高。led上游技术的发展将使led灯具的生产成本越来越低,更显led照明的优势。以下以蓝光led为例介绍其外延片生产工艺如下:首先在衬低上制作氮化鎵(gan)基的外延片,这个过程主要是在金属有机化学气相沉积外延片炉(mocvd)中完成的;准备好制作gan基外延片所需的材料源和各种高纯的气体之后,按照工艺的要求就可以逐步把外延片做好,常用的衬底主要有蓝宝石、碳化硅和硅衬底,以及gaas、aln、zno等材料,mocvd是利用气相反应物(前驱物)及ⅲ族的有机金属和
ⅴ
族的nh3在衬底表面进行反应,将所需的产物沉积在衬底表面。通过控制温度、压力、反应物浓度和种类比例,从而控制镀膜成分、晶相等品质。mocvd外延炉是制作led外延片最常用的设备,然后是对led的pn结的两个电极进行加工,电极加工也是制作led芯片的关键工序,包括清洗、蒸镀、黄光、化学蚀刻、熔合、研磨;然后对led毛片进行划片、测试和分选,就可以得到所需的led芯片了。目前,led灯珠一般都是阵列在支架上,在检测过程中需要使用剥料机构把led灯珠从支架上剥离下来,然后人工去除掉破碎的led灯珠,保留完整的led灯珠,最后再用视觉识别机构对led灯珠进行视觉检测,把不符合要求的led灯珠识别出来,最后再收集到收料箱内。整个过程自动化程度低,效率有待进一步提升,影响生产效率,故亟需设计一种新型led灯检测机构,基于此,本发明设计了led灯剥料检测机构及检测方法,以解决上述问题。
技术实现要素:
3.本发明的目的在于提供led灯剥料检测机构及检测方法,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:led灯剥料检测机构,包括剥料装置、上料机器人、视觉检测装置、分拣装置、第一输送机、第二输送机、第三输送机和控制器,所述控制器与剥料装置、视觉检测装置和分拣装置信号连接,所述剥料装置的左侧通过通槽水平安装有第一输送机,所述上料机器人安装在第一输送机的另一端,所述第二输送机和第三输送机分别通过通槽水平安装在剥料装置的前后侧,所述视觉检测装置安装在第三输送机的外端下方,所述视觉检测装置的右侧固定安装有分拣装置;
5.所述剥料装置包括矩形密封盒,所述矩形密封盒的前表面上部水平上下间隔通过
通槽固定有贯穿槽体,上下两个所述贯穿槽体的内腔对角处滑动设置有传动齿条,两个所述传动齿条的齿牙相对设置且通过通槽贯穿于两个贯穿槽体的相对表面,所述传动齿条上垂直贯穿固定有延伸要矩形密封盒内腔的支撑管,所述矩形密封盒的表面通过焊接底座固定有第一正反转微型电机,所述第一正反转微型电机的电机轴上固定套接有与上下两个传动齿条均啮合的传动齿轮,上部所述支撑管的内端固定有矩形块,所述矩形块的右侧下部倾斜固定有第一推板,所述第一推板的下表面中部垂直固定有带刮板的电插锁,所述矩形密封盒的内腔两侧对称倾斜贯穿固定有第一排料槽,两个所述第一排料槽的内端之间固定有第一水平板,所述第一水平板的右侧中央水平设置有剪切槽,下部所述支撑管的内端固定有凸出滑动设置在剪切槽内腔的直角梯形块,所述直角梯形块的凸出内表面固定有第二推板,所述直角梯形块的斜面水平固定有与剪切槽上端面平齐且等长的移动条,所述第二推板滑动贴合第一水平板的上表面,所述第一推板位于第二推板上方,所述第一水平板位于第一输送机下方,所述控制器信号连接有定时系统、对比单元、第一正反转控制继电器和电插锁,所述第一正反转控制继电器信号连接有第一正反转微型电机,所述定时系统包括四个独立的定时模块。
6.进一步的,所述矩形密封盒的前表面左侧上部安装有弹簧卷线盘,所述弹簧卷线盘上的导线贯穿于上部所述支撑管内腔。
7.进一步的,所述传动齿条的两端与贯穿槽体的内壁之间通过弹簧卷筒和塑料布填充设置。
8.进一步的,任意一个所述贯穿槽体的内腔靠近传动齿条内端上均内嵌固定有常闭开关,所述常闭开关串接在第一正反转微型电机的反转接电导线上。
9.进一步的,所述第一推板、第二推板和刮板的宽度均与第一水平板的宽度一致,且刮板的两端向内弯曲。
10.进一步的,所述视觉检测装置包括安装块,所述安装块上设置有竖截面呈五边形的储料槽,所述储料槽的内壁右侧下方呈竖直状且设置有开口槽,所述储料槽的内壁左侧呈竖直状且转动倾斜安装有浮动板,所述浮动板的右棱与储料槽内壁右侧贴合且中部固定有插入开口槽内腔的挡板,所述浮动板的下表面与储料槽的内壁左侧之间转动安装有电动推杆,所述储料槽的内腔底部水平固定有贯穿于安装块右侧的第四输送机,所述安装块的右侧固定有外端设置有法兰的第一护管,所述第一护管包覆在第四输送机的外侧,所述第一护管的外壁上部通过通孔内嵌固定有正对第四输送机输送带的视觉检测镜头,所述视觉检测镜头信号连接控制器,所述控制器信号连接有第一手动信号触发模块和电动推杆。
11.进一步的,所述浮动板的上表面固定胶粘有软橡胶层,且软橡胶层的表面设置有横向浅纹路。
12.进一步的,所述分拣装置包括一端设置有法兰的第二护管,所述第二护管的内腔两侧对称倾斜贯穿固定有第二排料槽,两个所述第二排料槽的内端之间固定有第二水平板,所述第二护管的内壁上部竖直固定有安装板,所述安装板的前表面下方固定有第二正反转微型电机,所述第二正反转微型电机的电机轴上固定有转板,所述转板位于第二水平板上方,所述第二正反转微型电机信号连接有第二正反转控制继电器,所述第二正反转控制继电器信号连接控制器,所述控制器信号连接有第二手动信号触发模块。
13.进一步的,其中一个所述第二排料槽的上方通过龙门架转动安装有离子风机。
14.led灯剥料检测机构的检测方法,包括如下步骤:
15.s1:剥料、利用剥料装置将led灯珠从支架上剥离下来;
16.s2:抖动出料、第三输送机将剥离的led灯珠输送到储料槽内壁和浮动板之间,浮动板上下抖动,进而挡板与开口槽间歇性分离,led灯珠逐次通过开口槽掉落在第四输送机上;
17.s3:视觉检测、第四输送机上的led灯珠逐次被视觉检测镜头采集图像,利用对比单元和控制器进行检测;
18.s4:分拣、控制器检测合格时,使第二正反转微型电机正转,转板将合格的led灯珠推向左侧的第二排料槽,反之,led灯珠被推入右侧的第二排料槽内。
19.与现有技术相比,本发明的有益效果是:本发明通过上料机器人将待检测的led灯珠连同支架放置到第一输送机上,第一输送机将led灯泡和支架一同输入到剥料装置内,剥料装置将led灯珠从支架上剥离出来,支架通过第二输送机输出并收集,led灯珠通过第三输送机落入视觉检测装置内,破碎的led灯珠被识别出来,最后利用分拣装置筛分,收集完整的led灯珠,该装置自动化程度和生产效率均明显提高,具有市场推广前景。
附图说明
20.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
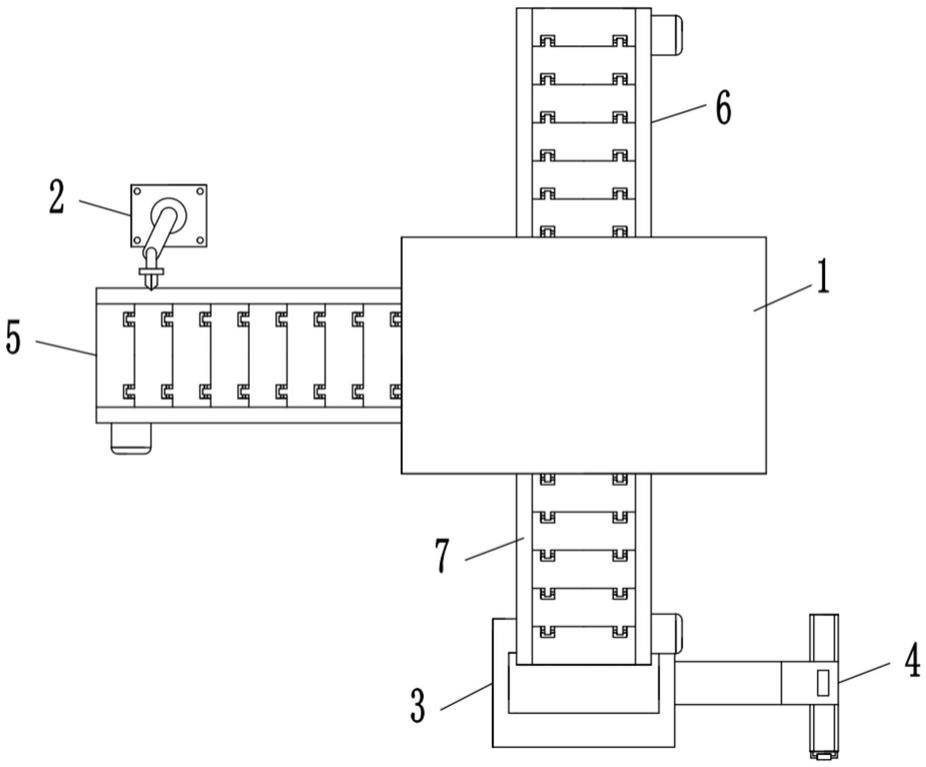
21.图1为本发明结构示意图;
22.图2为图1中剥料装置结构示意图;
23.图3为图2局部剖视图;
24.图4为本发明控制原理图;
25.图5为图1中视觉检测装置结构示意图;
26.图6为图1中分拣装置结构示意图;
27.图7为本发明流程图。
28.附图中,各标号所代表的部件列表如下:
[0029]1‑
剥料装置,2
‑
上料机器人,3
‑
视觉检测装置,4
‑
分拣装置,5
‑
第一输送机,6
‑
第二输送机,7
‑
第三输送机,8
‑
控制器,9
‑
第一手动信号触发模块,10
‑
第二手动信号触发模块,11
‑
定时系统,12
‑
第一正反转控制继电器,13
‑
第二正反转控制继电器,14
‑
对比单元,100
‑
矩形密封盒,101
‑
贯穿槽体,102
‑
传动齿条,103
‑
支撑管,104
‑
第一正反转微型电机,105
‑
传动齿轮,106
‑
矩形块,107
‑
第一推板,108
‑
电插锁,109
‑
第一水平板,110
‑
剪切槽,111
‑
第一排料槽,112
‑
直角梯形块,113
‑
第二推板,114
‑
移动条,30
‑
安装块,31
‑
储料槽,32
‑
开口槽,33
‑
浮动板,34
‑
电动推杆,35
‑
挡板,36
‑
第四输送机,37
‑
第一护管,38
‑
视觉检测镜头,40
‑
第二护管,41
‑
第二排料槽,42
‑
第二水平板,43
‑
安装板,44
‑
第二正反转微型电机,45
‑
转板。
具体实施方式
[0030]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0031]
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0032]
请参阅图1
‑
7,本发明提供一种技术方案:led灯剥料检测机构,包括剥料装置1、上料机器人2、视觉检测装置3、分拣装置4、第一输送机5、第二输送机6、第三输送机7和控制器8,控制器8与剥料装置1、视觉检测装置3和分拣装置4信号连接,剥料装置1的左侧通过通槽水平安装有第一输送机5,上料机器人2安装在第一输送机5的另一端,第二输送机6和第三输送机7分别通过通槽水平安装在剥料装置1的前后侧,视觉检测装置3安装在第三输送机7的外端下方,视觉检测装置3的右侧固定安装有分拣装置4;
[0033]
剥料装置1包括矩形密封盒100,矩形密封盒100的前表面上部水平上下间隔通过通槽固定有贯穿槽体101,上下两个贯穿槽体101的内腔对角处滑动设置有传动齿条102,两个传动齿条102的齿牙相对设置且通过通槽贯穿于两个贯穿槽体101的相对表面,传动齿条102上垂直贯穿固定有延伸要矩形密封盒100内腔的支撑管103,矩形密封盒100的表面通过焊接底座固定有第一正反转微型电机104,第一正反转微型电机104的电机轴上固定套接有与上下两个传动齿条102均啮合的传动齿轮105,上部支撑管103的内端固定有矩形块106,矩形块106的右侧下部倾斜固定有第一推板107,第一推板107的下表面中部垂直固定有带刮板的电插锁108,矩形密封盒100的内腔两侧对称倾斜贯穿固定有第一排料槽111,两个第一排料槽111的内端之间固定有第一水平板109,第一水平板109的右侧中央水平设置有剪切槽110,下部支撑管103的内端固定有凸出滑动设置在剪切槽110内腔的直角梯形块112,直角梯形块112的凸出内表面固定有第二推板113,直角梯形块112的斜面水平固定有与剪切槽110上端面平齐且等长的移动条114,第二推板113滑动贴合第一水平板109的上表面,第一推板107位于第二推板113上方,第一水平板109位于第一输送机5下方,控制器8信号连接有定时系统11、对比单元14、第一正反转控制继电器12和电插锁108,第一正反转控制继电器12信号连接有第一正反转微型电机104,定时系统11包括四个独立的定时模块。
[0034]
其中,矩形密封盒100的前表面左侧上部安装有弹簧卷线盘,弹簧卷线盘上的导线贯穿于上部支撑管103内腔,避免电插锁108的接电线随左右移动的传动齿条102而缠绕打结;
[0035]
传动齿条102的两端与贯穿槽体101的内壁之间通过弹簧卷筒和塑料布填充设置,使传动齿条102左右移动时,贯穿槽体101被封口,减少杂物通过贯穿槽体101进入矩形密封盒100内;
[0036]
任意一个贯穿槽体101的内腔靠近传动齿条102内端上均内嵌固定有常闭开关,常闭开关串接在第一正反转微型电机104的反转接电导线上,避免定时系统11失效而使第一正反转微型电机104无法正常停机,造成传动齿轮105与传动齿条102脱离;
[0037]
第一推板107、第二推板113和刮板的宽度均与第一水平板109的宽度一致,且刮板的两端向内弯曲,使led灯珠和支架可以分离彻底,并且使led灯珠被完全从第一水平板109
上推入到第一排料槽111内而进入视觉检测装置3内;
[0038]
视觉检测装置3包括安装块30,安装块30上设置有竖截面呈五边形的储料槽31,储料槽31的内壁右侧下方呈竖直状且设置有开口槽32,储料槽31的内壁左侧呈竖直状且转动倾斜安装有浮动板33,浮动板33的右棱与储料槽31内壁右侧贴合且中部固定有插入开口槽32内腔的挡板35,浮动板33的下表面与储料槽31的内壁左侧之间转动安装有电动推杆34,储料槽31的内腔底部水平固定有贯穿于安装块30右侧的第四输送机36,安装块30的右侧固定有外端设置有法兰的第一护管37,第一护管37包覆在第四输送机36的外侧,第一护管37的外壁上部通过通孔内嵌固定有正对第四输送机36输送带的视觉检测镜头38,视觉检测镜头38信号连接控制器8,控制器8信号连接有第一手动信号触发模块9和电动推杆34;
[0039]
浮动板33的上表面固定胶粘有软橡胶层,且软橡胶层的表面设置有横向浅纹路,减缓冲击,同时起到阻隔作用,使led灯珠被逐个落到第四输送机36上,进而使每个间距增大,检测准确性提高;
[0040]
分拣装置4包括一端设置有法兰的第二护管40,第二护管40的内腔两侧对称倾斜贯穿固定有第二排料槽41,两个第二排料槽41的内端之间固定有第二水平板42,第二护管40的内壁上部竖直固定有安装板43,安装板43的前表面下方固定有第二正反转微型电机44,第二正反转微型电机44的电机轴上固定有转板45,转板45位于第二水平板42上方,第二正反转微型电机44信号连接有第二正反转控制继电器13,第二正反转控制继电器13信号连接控制器8,控制器8信号连接有第二手动信号触发模块10;
[0041]
其中一个第二排料槽41的上方通过龙门架转动安装有离子风机,用于去除led灯珠上的静电;
[0042]
led灯剥料检测机构的检测方法,包括如下步骤:
[0043]
s1:剥料、利用剥料装置1将led灯珠从支架上剥离下来,其中第一正反转微型电机104带动传动齿轮105在控制器8和定时系统11的独立定时模块控制下正反转一定时长,进而两个支撑管103相对运动后又分开,第一输送机5将待分离的led灯珠和支架一体输入到矩形密封盒100内侧的第一水平板109上,开始左移的直角梯形块112和第二推板113推动支架左移,右移的矩形块106带动第一推板107推动led灯珠右移,进而两者分开,移动条114用于填充剪切槽110,避免led灯珠卡在剪切槽110内,电插锁108在随第一推板107右移一定时间后伸长,刮板与第一水平板109接触,继续推动led灯珠进入右侧的第一排料槽111,支架进入左侧的第一排料槽111,随后在定时系统11控制下,两个支撑管103复位,电插锁108也复位,等待下一个待分离的led灯珠;
[0044]
s2:抖动出料、第三输送机7将剥离的led灯珠输送到储料槽31内壁和浮动板33之间,第一手动信号触发模块9产生启动信号,控制器8使电动推杆34伸缩,进而浮动板33上下抖动,进而挡板35与开口槽32间歇性分离,led灯珠逐次通过开口槽32掉落在第四输送机36上;
[0045]
s3:视觉检测、第四输送机36上的led灯珠逐次被视觉检测镜头38采集图像,利用对比单元14和控制器8进行检测;
[0046]
s4:分拣、利用第二手动信号触发模块10产生启动信号,给第二正反转控制继电器13通电,控制器8检测合格时,使第二正反转微型电机44正转,转板45将合格的led灯珠推向左侧的第二排料槽41,反之,led灯珠被推入右侧的第二排料槽41内。
[0047]
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0048]
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1