一种智能云仓综合管控平台的制作方法
1.本发明涉及云仓技术领域,具体为一种智能云仓综合管控平台。
背景技术:
2.我国物流业已步入转型升级的新阶段,2013年全社会物流总费用与国内生产总值的比率高达18%,高于发达国家水平1倍左右,也显著高于巴西、印度等发展中国家的水平,面对行业现状,我国需要更多地利用新一代信息技术提升和发展仓储、运输等业务,随着社会的发展,市场上一般都采用云仓对物品进行存放。
3.现有的大部分云仓它的智能化较低,一般都是通过人工对物品进行放置,从而不仅会提高劳动成本,还会提高劳动强度,为此,我们提出一种智能云仓综合管控平台。
技术实现要素:
4.鉴于上述和/或现有一种智能云仓综合管控平台中存在的问题,提出了本发明。
5.因此,本发明的目的是提供一种智能云仓综合管控平台,能够解决上述提出现有的大部分云仓它的智能化较低,一般都是通过人工对物品进行放置的问题。
6.为解决上述技术问题,根据本发明的一个方面,本发明提供了如下技术方案:
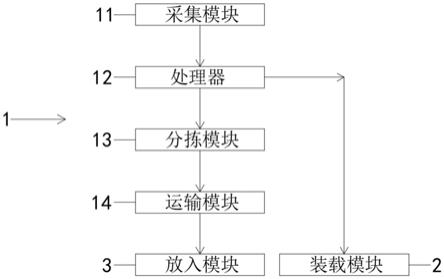
7.一种智能云仓综合管控平台,其包括云仓管控系统,所述云仓管控系统是由采集模块、处理器、分拣模块、运输模块、装载模块和放入模块组成,所述装载模块包括圆板;和
8.均匀滑动连接在圆板内壁的移动结构;和
9.安装在移动结构上的放置结构;
10.所述放入模块包括支撑板;和
11.连接在支撑板顶部两端内壁的升降组件,且两组升降组件通过传动组件传动连接,所述升降组件上设有机械手臂;和
12.安装在支撑板底部的第二驱动组件,且第二驱动组件与升降组件相连接。
13.作为本发明所述的一种智能云仓综合管控平台的一种优选方案,其中:所述采集模块连接处理器,所述处理器连接分拣模块,所述分拣模块连接运输模块,所述运输模块连接放入模块,所述处理器连接装载模块;
14.所述装载模块位于放入模块的一侧。
15.作为本发明所述的一种智能云仓综合管控平台的一种优选方案,其中:所述圆板内壁开设有滑槽,所述滑槽内壁滑动连接移动结构。
16.作为本发明所述的一种智能云仓综合管控平台的一种优选方案,其中:所述移动结构包括壳体和第一驱动组件,所述壳体的前侧两端内壁均固定安装关节轴承,所述关节轴承内壁活动连接小转轴,所述小转轴上固定安装前滚轮,所述前滚轮的底部接触在滑槽的底端内壁上。
17.作为本发明所述的一种智能云仓综合管控平台的一种优选方案,其中:所述壳体后侧内壁通过轴承转动连接大转轴,所述大转轴两端固定安装后滚轮,所述后滚轮的底部
接触在滑槽的底端内壁上;
18.所述第一驱动组件包括第一箱体,所述第一箱体固定安装在壳体的内壁上,所述第一箱体内壁安装第一伺服电机,所述第一伺服电机的输出轴通过连接杆固定安装齿轮一,所述齿轮一通过链条传动连接齿轮二,所述齿轮二内壁固定安装大转轴。
19.作为本发明所述的一种智能云仓综合管控平台的一种优选方案,其中:所述壳体的两端均固定安装导向轮,所述导向轮的一端外壁接触在滑槽的内壁上,所述壳体的顶部两端均固定安装小支撑板。
20.作为本发明所述的一种智能云仓综合管控平台的一种优选方案,其中:所述放置结构包括放置板和气缸,所述放置板底部固定安装小支撑板,所述放置板的顶部四周均固定安装气缸,所述气缸的输出端通过活塞杆固定安装放置板。
21.作为本发明所述的一种智能云仓综合管控平台的一种优选方案,其中:所述支撑板上固定安装支架;
22.所述升降组件包括螺杆,所述螺杆的底部通过轴承转动连接在支撑板的顶部两端内壁上,所述螺杆上螺纹连接螺母,所述螺母固定安装在升降板的两端内壁上,所述升降板的顶部设有机械手臂。
23.作为本发明所述的一种智能云仓综合管控平台的一种优选方案,其中:所述第二驱动组件包括第一箱体,所述第一箱体固定安装在支撑板的底部上,所述第一箱体内壁安装第一伺服电机,所述第一伺服电机的输出端通过连接杆转动连接在轴承上,且第一伺服电机的输出端通过连接杆固定连接在螺杆的底部上。
24.作为本发明所述的一种智能云仓综合管控平台的一种优选方案,其中:所述传动组件包括皮带轮,所述皮带轮内壁固定安装螺杆,两组所述皮带轮通过皮带传动连接。
25.与现有技术相比:
26.1.当需要对物品进行存放时,先通过采集模块对物品的信息进行采集,采集后的信息就会传输到处理器中,当处理器接收到信息后,通过分拣模块就会将物品传输到运输模块上,从而将物品移至到放入模块处,当物品移至到放入模块处时,机械手臂就会将物品抓起,其中,当处理器接收到信息后,处理器就会根据信息对装载模块和放入模块进行控制,从而将物品放置到合适的位置上,通过云仓管控系统对物品进行存放,具有实现智能化的作用,从而不仅会提高存放效率,还会降低劳动成本;
27.2.通过装载模块和放入模块具有避免在地面上铺设轨道的作用,从而会避免给工作人员带来不便;
28.3.通过放置结构对物品进行放置,具有节约空间的作用。
附图说明
29.图1为本发明云仓管控系统流程示意图;
30.图2为本发明装载模块结构俯视示意图;
31.图3为本发明图2中a处结构放大示意图;
32.图4为本发明移动结构俯视示意图;
33.图5为本发明图4中b处结构放大示意图;
34.图6为本发明装载模块结构正视示意图;
35.图7为本发明放置结构局部示意图;
36.图8为本发明放入模块结构侧视示意图;
37.图9为本发明图8中c处结构放大示意图;
38.图10为本发明升降组件局部示意图。
39.图中:云仓管控系统1、采集模块11、处理器12、分拣模块13、运输模块14、装载模块2、圆板21、滑槽221、移动结构22、壳体221、小支撑板222、导向轮223、小转轴224、关节轴承225、前滚轮226、大转轴227、后滚轮228、第一驱动组件229、第一箱体2291、第一伺服电机2292、齿轮一2293、链条2294、齿轮二2295、放置结构23、放置板231、气缸232、放入模块3、支撑板31、支架311、第二驱动组件32、第一箱体321、第一伺服电机322、传动组件33、皮带轮331、皮带332、升降组件34、螺杆341、升降板342、螺母343、机械手臂35。
具体实施方式
40.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明的实施方式作进一步地详细描述。
41.本发明提供一种智能云仓综合管控平台,具有实现智能化的优点,请参阅图1-图10,包括云仓管控系统1,所述云仓管控系统1是由采集模块11、处理器12、分拣模块13、运输模块14、装载模块2和放入模块3组成,所述装载模块2包括圆板21;和
42.均匀滑动连接在圆板21内壁的移动结构22;和
43.安装在移动结构22上的放置结构23;
44.所述放入模块3包括支撑板31;和
45.连接在支撑板31顶部两端内壁的升降组件34,且两组升降组件34通过传动组件33传动连接,所述升降组件34上设有机械手臂35;和
46.安装在支撑板31底部的第二驱动组件32,且第二驱动组件32与升降组件34相连接。
47.进一步的,所述采集模块11连接处理器12,所述处理器12连接分拣模块13,所述分拣模块13连接运输模块14,所述运输模块14连接放入模块3,所述处理器12连接装载模块2;
48.所述装载模块2位于放入模块3的一侧,具体的,采集模块11优选为扫码器,扫码器是一种读取条形码信息的机器,利用发射出红外线光源,然后根据反射的结果,利用芯片来译码,最后再返回条形码所代表的正确字符,通过采集模块11具有采集物品信息的作用;
49.处理器12作为计算机系统的运算和控制核心,是信息处理、程序运行的最终执行单元;
50.分拣模块13优选为机械手臂,机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,机械手臂能够接受指令,精确地定位到三维或二维空间上的某一点进行作业;
51.运输模块14优选为运输带,输送带又称运输带,是用于皮带输送带中起承载和运送物料作用的橡胶与纤维、金属复合制品,或者是塑料和织物复合的制品。
52.进一步的,所述圆板21内壁开设有滑槽221,所述滑槽221内壁滑动连接移动结构22。
53.进一步的,所述移动结构22包括壳体221和第一驱动组件229,所述壳体221的前侧
两端内壁均固定安装关节轴承225,所述关节轴承225内壁活动连接小转轴224,所述小转轴224上固定安装前滚轮226,所述前滚轮226的底部接触在滑槽221的底端内壁上,具体的,通过关节轴承225具有使小转轴224上的滚轮226进行摆动的作用,壳体221的前侧设有小滚轮,且小滚轮与滑槽221的底端内壁相接触,通过小滚轮具有防止壳体221发生倾斜的作用。
54.进一步的,所述壳体221后侧内壁通过轴承转动连接大转轴227,所述大转轴227两端固定安装后滚轮228,所述后滚轮228的底部接触在滑槽221的底端内壁上;
55.所述第一驱动组件229包括第一箱体2291,所述第一箱体2291固定安装在壳体221的内壁上,所述第一箱体2291内壁安装第一伺服电机2292,所述第一伺服电机2292的输出轴通过连接杆固定安装齿轮一2293,所述齿轮一2293通过链条2294传动连接齿轮二2295,所述齿轮二2295内壁固定安装大转轴227,具体的,通过第一驱动组件229具有使后滚轮228进行旋转的作用,从而使壳体221在滑槽221中进行移动的作用。
56.进一步的,所述壳体221的两端均固定安装导向轮223,所述导向轮223的一端外壁接触在滑槽221的内壁上,所述壳体221的顶部两端均固定安装小支撑板222,具体的,通过导向轮223具有对壳体221的移动进行导向的作用。
57.进一步的,所述放置结构23包括放置板231和气缸232,所述放置板231底部固定安装小支撑板222,所述放置板231的顶部四周均固定安装气缸232,所述气缸232的输出端通过活塞杆固定安装放置板231,具体的,放置板231具有放置物品的作用,通过气缸232具有带动放置板231进行升降的作用,从而达到可以根据物品的大小对两组放置板231之间的距离进行调节,具有节约空间的作用。
58.进一步的,所述支撑板31上固定安装支架311;
59.所述升降组件34包括螺杆341,所述螺杆341的底部通过轴承转动连接在支撑板31的顶部两端内壁上,所述螺杆341上螺纹连接螺母343,所述螺母343固定安装在升降板342的两端内壁上,所述升降板342的顶部设有机械手臂35,具体的,旋转的螺杆341通过螺母343具有使升降板342进行升降的作用。
60.进一步的,所述第二驱动组件32包括第一箱体321,所述第一箱体321固定安装在支撑板31的底部上,所述第一箱体321内壁安装第一伺服电机322,所述第一伺服电机322的输出端通过连接杆转动连接在轴承上,且第一伺服电机322的输出端通过连接杆固定连接在螺杆341的底部上,通过第二驱动组件32和传动组件33具有使螺杆341进行旋转的作用。
61.进一步的,所述传动组件33包括皮带轮331,所述皮带轮331内壁固定安装螺杆341,两组所述皮带轮331通过皮带332传动连接。
62.在具体使用时,当需要对物品进行存放时,先通过采集模块11对物品的信息进行采集,采集后的信息就会传输到处理器12中,当处理器12接收到信息后,通过分拣模块13就会将物品传输到运输模块14上,从而将物品移至到放入模块3处,当物品移至到放入模块3处时,机械手臂35就会将物品抓起,其中,当处理器12接收到信息后,处理器12就会根据信息对装载模块2和放入模块3进行控制,从而将物品放置到合适的位置上;
63.当机械手臂35将物品抓起后,通过第一伺服电机2292、齿轮一2293、链条2294和齿轮二2295使大转轴227上的后滚轮228进行转动,转动的后滚轮228就会使壳体221在滑槽221中进行移动,直至相对应的放置结构23移至机械手臂35处,当放置结构23移至机械手臂35处时,第一伺服电机322就会带动一侧的螺杆341进行旋转,当一侧的螺杆341旋转时,就
会通过皮带轮331和皮带332使另一侧的螺杆341进行同时旋转,旋转的螺杆341就会通过螺母343带动升降板342进行升降,直至物品位于相对应的两组放置板231之间,当物品位于相对应的两组放置板231之间时,气缸232就会带动顶部的放置板231进行上升,上升后,通过机械手臂35将物品放在底部的放置板231上,当物品放在底部的放置板231上时,再次通过气缸232使顶部的放置板231进行下降,直至顶部的放置板231与物品之间的距离达到合适的数值,从而完成对物品进行存放。
64.虽然在上文中已经参考实施方式对本发明进行了描述,然而在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,本发明所披露的实施方式中的各项特征均可通过任意方式相互结合起来使用,在本说明书中未对这些组合的情况进行穷举性的描述仅仅是出于省略篇幅和节约资源的考虑。因此,本发明并不局限于文中公开的特定实施方式,而是包括落入权利要求的范围内的所有技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1