一种智能分拣机及智能分拣系统的制作方法
1.本实用新型涉及智能物流装备技术领域,特别是一种智能分拣机及智能分拣系统。
背景技术:
2.随着传统制造业和服务业的数字化转型以及全球化分工程度的进一步提升,对物料进行高效、精准地移动、搬运及分拣,成为相关行业提质增效的迫切需求。
3.现有技术中对物料进行分拣基本上选用交叉分拣,但是,交叉分拣的成本较高,占地面积较大,控制比较复杂,各种费用也很高,在实际应用中,谁能将包裹分拣控制的更加精准,谁在市场中更加具有竞争优势。
4.现有技术出现了滚筒分拣机、摆轮分拣机、顶升移栽分拣机等,上述分拣机对于小型物料、软体物料的通用性较差,经常出现物料停滞不前导致追包、分拣效率低甚至分拣错误的情况。
技术实现要素:
5.本实用新型所要解决的技术问题在于现有技术中的分拣物料错误率高且效率较低的问题,而提供了一种效率较高且错误率较低的智能分拣机、智能分拣系统。
6.为解决上述技术问题,本实用新型采用的技术方案如下:
7.本实用新型提供一种智能分拣机,用于物料移动、搬运及分拣,所述智能分拣机包括一个进料口和一个出料口,包括:
8.若干运输带,所述运输带具有运输面并联通所述进料口及所述出料口;
9.用于将物料分拣至指定位置的若干分拣带,所述分拣带的转动方向与所述运输带不同。
10.优选地,所述若干运输带为多个,所述分拣带设置于相邻的所述运输带之间。
11.优选地,所述若干运输带为一个,该运输带的运输面具有若干凹陷部,所述分拣带设置于所述凹陷部中。
12.优选地,每个所述运输带包括第一带体、第一主动轮及第一转轮,所述第一带体缠绕在所述第一主动轮及所述第一转轮外沿,且所述第一带体在所述第一主动轮的带动下转动,其中所述第一转轮为主动轮或从动轮。
13.优选地,每个所述分拣带包括第二带体、第二主动轮及第二转轮,所述第二带体缠绕在所述第二主动轮及所述第二转轮外沿,且所述第二带体在所述第二主动轮的带动下转动,其中所述第二转轮为主动轮或从动轮。
14.优选地,所述第二带体包括平滑部和凸起部,所述凸起部的厚度大于所述平滑部的厚度,且所述平滑部低于、等于或高于所述运输面五毫米以内;
15.所述凸起部适于在所述分拣带的所述第二带体启动分拣时全部或部分位于所述第二主动轮的上方。
16.优选地,所述平滑部的摩擦系数小于所述凸起部的摩擦系数。
17.优选地,所述分拣带的转动方向与所述运输带的传送方向垂直。
18.优选地,还包括机架,所述进料口和所述出料口分别设置在所述机架的两侧,所述运输带和所述分拣带设置在所述机架的上部,且所述机架下部设置有用于支撑的基脚,所述机架侧部设置有用于冷却的风扇。
19.本实用新型还提供一种包括上述智能分拣机的智能分拣系统,该系统还包括运输段,所述运输段与若干所述智能分拣机依次排列,且所述智能分拣机的所述进料口和上游相邻所述智能分拣机的所述出料口联通,所述智能分拣机的所述出料口和下游相邻所述智能分拣机的所述进料口联通,最上游的所述智能分拣机的所述进料口和所述运输段的的末端联通。
20.优选地,所述运输段包括依次设置的拉距段皮带、图像识别处理段皮带和加速段皮带,所述图像识别处理段皮带上设置有图像识别处理模块。
21.本实用新型的上述技术方案相比现有技术具有以下优点:
22.①
本实用新型的智能分拣机,用于物料移动、搬运及分拣,包括若干运输带和若干分拣带,运输带共同形成运输面并联通进料口及出料口,分拣带的转动方向与运输带不同。利用运输带替代滚筒,增加了运输装置与物料之间的摩擦力和物料运输过程中的平稳性,尤其是实现了对小包物料和软包物料的高效平稳运输,提升了运输及分拣效率,降低了由于物料大小/软硬不同导致的“追包”现象发生概率,降低了分拣出现错误的概率。
23.②
本实用新型的智能分拣机,每个运输带包括第一带体、第一主动轮及第一转轮,第一带体缠绕在第一主动轮及第一转轮外沿,且第一带体在第一主动轮的带动下转动,其中第一转轮为主动轮或从动轮。这样的设计,通过两个转轮带动第一带体转动,实现了运输带张紧、平稳地运转,进一步提升了运输带与物料之间的摩擦力,进一步提升了运输及分拣效率,降低了分拣出现错误的概率。
24.③
本实用新型的智能分拣机,每个分拣带包括第二带体、第二主动轮及第二转轮,第二带体缠绕在第二主动轮及第二转轮外沿,且第二带体在第二主动轮的带动下转动,其中第二转轮为主动轮或从动轮;第二带体由平滑部和凸起部组成,凸起部的厚度大于平滑部的厚度,且平滑部所共同形成的面低于、等于或不高于运输面以上五毫米;凸起部适于在第二带体转至特定位置时全部位于第二主动轮的下方。这样的设计,在智能分拣机的分拣带未得到分拣指令时,平滑部位于上方,凸起部位于下方,由于平滑部不高于运输面以上五毫米,物料可以顺利地通过该智能分拣机;当某一分拣带得到分拣指令时,该分拣带转动,凸起部转至上方,由于凸起部比平滑部更厚,此时物料会被凸起部阻碍,并由凸起部带动物料向其他方向运动,实现物料的智能分拣。
25.④
本实用新型的智能分拣机,平滑部的摩擦系数小于凸起部的摩擦系数。这样的设计,当需要分拣时,物料更不容易滑过凸起部,提升了分拣效率,降低了分拣错误率。
26.⑤
本实用新型的智能分拣机,还包括机架,进料口和出料口分别设置在机架的两侧,运输带和分拣带设置在机架的上部,且机架下部设置有用于支撑的基脚,机架侧部设置有用于冷却的风扇。这样的设计,智能分拣机更加稳定,且内部结构不易由于过热而导致故障。
27.⑥
本实用新型的智能分拣系统,还包括运输段,运输段与若干智能分拣机依次排
列,且智能分拣机的进料口和上游相邻智能分拣机的出料口联通,智能分拣机的出料口和下游相邻智能分拣机的进料口联通,最上游的智能分拣机的进料口和运输段的末端联通。这样的设计,利用智能分拣机的效率和低错误率优势,可以实现对物料的整体智能搬运,进一步提升了分拣效率。
28.⑦
本实用新型的智能分拣系统,运输段包括依次设置的拉距段皮带、图像识别处理段皮带和加速段皮带,图像识别处理段皮带上设置有图像识别处理模块。这样的设计,通过拉距段皮带、图像识别处理段皮带分别对物料进行拉距和图像识别处理,进一步实现了智能搬运,提升了分拣效率。利用加速段皮带对物料进行加速,也进一步提升了分拣效率。
附图说明
29.为了使本实用新型的内容更容易被清楚地理解,下面根据本实用新型的具体实施例并结合附图,对本实用新型作进一步详细地说明,其中
30.图1是本实用新型优选实施例中智能分拣系统的结构示意图;
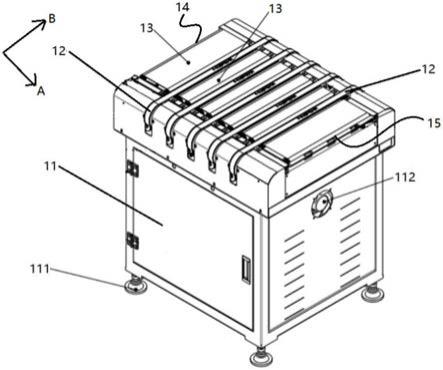
31.图2是本实用新型优选实施例中智能分拣机的结构示意图;
32.图3是图2中a方向视图;
33.图4是图2中b方向视图;
34.图5是图3中c
‑
c方向剖视图;
35.图6是图4中d
‑
d方向剖视图;
36.图7是本实用新型实施例三中智能分拣机运输带的结构示意图。
37.图中附图标记表示为:1
‑
智能分拣机,11
‑
机架,111
‑
基脚,112
‑
风扇,12
‑
分拣带,121
‑
第二带体,1211
‑
平滑部,1212
‑
凸起部,122
‑
第二主动轮,123
‑
第二从动轮,13
‑
运输带,131
‑
第一带体,132
‑
第一主动轮,133
‑
第一从动轮,14
‑
进料口,15
‑
出料口,2
‑
拉距段皮带,3
‑
图像识别处理段皮带,31
‑
图像识别处理模块,4
‑
加速段皮带。
具体实施方式
38.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型的实施方式作进一步地详细描述。
39.实施例一
40.如图1
‑
6所示,是本实用新型的优选实施例,其公开了一种智能分拣系统,所述智能分拣系统包括运输段及若干智能分拣机1。
41.所述智能分拣机1包括一个进料口14、一个出料口15、若干运输带13、若干分拣带12及机架11。所述进料口14和所述出料口15分别设置在所述机架11的两侧,所述运输带13和所述分拣带12设置在所述机架11的上部,且所述机架11下部设置有用于支撑的基脚111,所述机架11侧部设置有用于冷却的风扇112。
42.所述运输带13共同形成运输面并联通所述进料口14及所述出料口15,其中每个所述运输带13包括第一带体131、第一主动轮132及第一转轮,所述第一带体131缠绕在所述第一主动轮132及所述第一转轮外沿,且所述第一带体131在所述第一主动轮132的带动下转动,其中所述第一转轮为主动轮或从动轮。在本实施例中,所述第一转轮为第一从动轮133。
43.所述分拣带12用于将物料分拣至指定位置,其中所述分拣带12的转动方向与所述
运输带13不同。在本实施例中,所述分拣带12的转动方向与所述运输带13的传送方向垂直。
44.每个所述分拣带12包括第二带体121、第二主动轮122及第二转轮,所述第二带体121缠绕在所述第二主动轮122及所述第二转轮外沿,且所述第二带体121在所述第二主动轮122的带动下转动,其中所述第二转轮为主动轮或从动轮。在本实施例中,所述第二转轮为第二从动轮123。
45.所述第二带体121由平滑部1211和凸起部1212组成,所述凸起部1212的厚度大于所述平滑部1211的厚度,且所述平滑部1211低于、等于或高于所述运输面五毫米以内。在本实施例中,所述平滑部1211所共同形成的面不高于所述运输面,进一步地,所述平滑部1211所共同形成的面低于所述运输面二毫米。
46.所述凸起部1212适于在所述第二带体121转至特定位置时全部位于所述第二主动轮122的下方。在本实施例中,所述平滑部1211的摩擦系数小于所述凸起部1212的摩擦系数。
47.在本实施例中,所述第二带体121可以双向旋转,此时一个所述智能分拣机1可以对应两个方向,即可以对应两个不同的分拣出口。
48.所述运输段与若干所述智能分拣机1依次排列,且所述智能分拣机1的所述进料口14和上游相邻所述智能分拣机1的所述出料口15联通,所述智能分拣机1的所述出料口15和下游相邻所述智能分拣机1的所述进料口14联通,最上游的所述智能分拣机1的所述进料口14和所述运输段的末端联通。在本实施例中,所述运输段包括依次设置的拉距段皮带2、图像识别处理段皮带3和加速段皮带4,所述图像识别处理段皮带3上设置有图像识别处理模块31。进一步的,所述运输段包括一个所述拉距段皮带2、一个所述图像识别处理段皮带3和一个所述加速段皮带4。
49.实施例二
50.与实施例一相比,在本实施例中,所述运输段包括若干所述拉距段皮带2、若干所述图像识别处理段皮带3和若干所述加速段皮带4。所述拉距段皮带2的数目等于所述图像识别处理段皮带3的数目,且大于所述加速段皮带4的数目,进一步的,所述拉距段皮带2的数目为三个,所述加速段皮带4的数目为一个。
51.实施例三
52.如附图7所示,与实施例一相比,在本实施例中,所述若干个运输带优选为仅一个,即本实施例中的运输带具有一整体结构,所述运输带包括一个所述第一带体131及若干第一主动轮132、若干第一从动轮133,所述第一主动轮132、所述第一从动轮133共同支撑所述运输带形成间断的运输面。所述第一带体131的运输面具有凹陷部,分拣带设置于凹陷部中,分拣部的第二带体的平滑部121低于、等于或高于运输面五毫米以内。
53.其他实施例
54.在其他实施例中,所述进料口14和所述出料口15还可以设置在所述机架11的中部或底部。
55.在其他实施例中,所述第一转轮和/或所述第二转轮还可以为主动轮。
56.在其他实施例中,所述分拣带12的转动方向与所述运输带13还可以呈30度、45度、60度、75度或其他数值。此外,所述第二带体121可以只能单向运动,此时一个所述智能分拣机1只对应一个分拣出口。当所述分拣带12为单向转动时,所述分拣带12的转动方向与所述
运输带13还可以呈105度、120度、135度、150度或其他数值。
57.在其他实施例中,所述平滑部1211所共同形成的面还可以高于所述运输面一毫米、三毫米或五毫米,也可以与所述运输面高度一致,或低于所述运输面一毫米、三毫米、五毫米、十毫米、二十毫米、五十毫米。只要不会造成物料的运输中止,即可实现本实用新型的设计目的。
58.在其他实施例中,平滑部1211的摩擦系数还可以大于或等于所述凸起部1212的摩擦系数。虽然会对分拣效率产生部分影响,但并不影响本实用新型设计目的的实现。
59.在其他实施例中,所述拉距段皮带2、所述图像识别处理段皮带3和所述加速段皮带4的数目还可以是二个、四个或其他数值。
60.显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引申出的显而易见的变化或变动仍处于本实用新型创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1