一种餐盘分拣装置的制作方法
1.本实用新型涉及餐盘分拣技术领域,尤其涉及一种餐盘分拣装置。
背景技术:
2.随着餐饮行业的发展,现有的餐饮店会通过利用不同种类的餐盘对菜品进行价格划分,例如回转寿司店里的寿司盘,尽管大小尺寸是一致的,但是颜色图案是不同的,如此方便对服务员进行清算统计。但由于此类的餐盘在清理中普遍是集中清洗,清洗后再通过人工进行分拣。存在工作量大,且容易出现人为分拣失误,餐盘分拣精度低的问题。
技术实现要素:
3.本实用新型的目的在于提出一种餐盘分拣装置,以解决人工分拣餐盘容易出现人为分拣失误,分拣精度低且工作量大的技术问题。
4.为了解决上述技术问题,本实用新型第一方面公开了:一种餐盘分拣装置,包括运输机构、分拣机构和收集机构,所述分拣机构包括餐盘识别装置、转向台、转移运输带和多个分拣运输带;所述转向台水平转动地设置在多个所述分拣运输带的始端;所述转移运输带设置在所述转向台的顶面,所述转移运输带的始端与所述运输机构的输出端连接,所述转移运输带的终端分别与多个所述分拣运输带中的一个连接;所述餐盘识别装置设置在所述转向台的上方,用于识别在所述转移运输带上的餐盘的种类;所述转向台与所述餐盘识别装置信号连接,所述转向台用于根据餐盘识别装置的识别结果调整转移运输带与多个分拣运输带中的其中一个连接;所述收集机构设置在各个所述分拣运输带的输出端,所述收集机构用于收集所述分拣机构输出的餐盘。
5.作为一种可选的实施方式,所述转向台包括托架、驱动电机和第一控制器;所述托架水平设置,所述转移运输带安装在所述托架上,所述驱动电机与所述托架连接并能带动托架水平转动,所述第一控制器与所述驱动电机信号连接。
6.作为一种可选的实施方式,所述收集机构包括升降台、升降气缸和第二控制器,所述升降台上下升降地设置在所述分拣运输带的终端,所述升降气缸与所述升降台连接并能带动升降台上升和下降,所述第二控制器与所述升降气缸信号连接。
7.作为一种可选的实施方式,所述餐盘识别装置包括机器视觉相机和处理器,所述机器视觉相机与所述处理器连接,所述处理器分别与所述第一控制器和所述第二控制器连接。
8.作为一种可选的实施方式,所述第一控制器和第二控制器为plc控制装置。
9.作为一种可选的实施方式,所述运输机构包括餐盘运输带、第一转向调整导柱和第二转向调整导柱,所述餐盘运输带的宽度大于或等于餐盘的宽度,且小于餐盘的长度;所述第一转向调整导柱竖立设置在所述餐盘运输带的一侧,所述第二转向调整导柱竖立设置在所述餐盘运输带的另一侧,且所述第二转向调整导柱设置在所述第一转向调整柱的下游。
10.作为一种可选的实施方式,所述运输机构还包括对中组件,所述对中组件位于第二所述转向调整导柱的下游处;所述对中组件包括第一气缸、第二气缸、传感器和第三控制器,所述第一气缸与所述第二气缸相对设置在餐盘运输带的两侧,且所述第一气缸和所述第二气缸的输出端相对伸出设置,所述传感器设置在第一气缸与第二气缸之间的餐盘运输带区段的上方,所述传感器与所述第三控制器连接,所述第三控制器与所述第一气缸和所述第二气缸信号连接。
11.作为一种可选的实施方式,所述第一转向调整导柱和第二转向调整导柱的侧壁分别套设有弹性海绵。
12.与现有技术相比,本实用新型实施例具有以下有益效果:
13.在本实用新型的实施例中,当运输机构将餐盘运输到转移运输带后,餐盘识别装置对转移运输带上餐盘进行识别,识别出餐盘的种类后,并根据餐盘的种类判断出该餐盘应该送入哪一条分拣运输带上,然后利用转向台转动转移运输带,使转移运输带的终端与判断结果相应的分拣运输带连接,转移运输带将餐盘转运到分拣运输带上,最后利用分拣运输带将餐盘输送到收集机构内进行收集。实现自动分拣餐盘,有效降低人为操作失误,使餐盘的分类更为精确方便,提高餐盘的收集效率。
附图说明
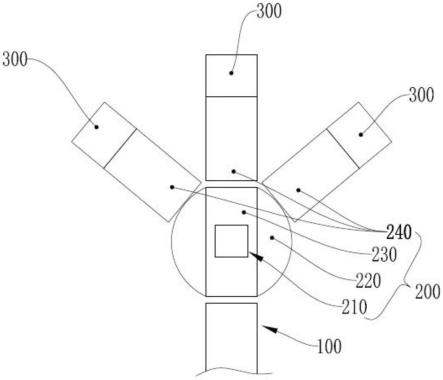
14.图1是本实用新型其中一个实施例的结构俯视示意图;
15.图2是本实用新型其中一个实施例的转移运输带输送餐盘的俯视示意图;
16.图3是本实用新型其中一个实施例的转向台的结构示意图;
17.图4是本实用新型其中一个实施例的收集机构的结构示意图;
18.图5是本实用新型其中一个实施例的运输机构的结构示意图;
19.附图中:100-运输机构、110-餐盘运输带、120-第一转向调整导柱、130-第二转向调整导柱、140-对中组件、141-第一气缸、142-第二气缸、143-传感器、144-第三控制器、200-分拣机构、210-餐盘识别装置、211-机器视觉相机、212-处理器、220-转向台、221-托架、222-驱动电机、223-第一控制器、230-转移运输带、240-分拣运输带、300-收集机构、310-升降台、320-升降气缸、330-第二控制器。
具体实施方式
20.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
21.在本实用新型的描述中,需要理解的是,术语“纵向”、“横向”“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征,用于区别描述特征,无顺序之分,无轻重之分。
22.下面结合图1至图5,描述本实用新型实施例的一种餐盘分拣装置,包括运输机构100、分拣机构200和收集机构300,
23.所述分拣机构200包括餐盘识别装置210、转向台220、转移运输带230和多个分拣运输带240;
24.所述转向台220水平转动地设置在多个所述分拣运输带240的始端;
25.所述转移运输带230设置在所述转向台220的顶面,所述转移运输带230的始端与所述运输机构100的输出端连接,所述转移运输带230的终端分别与多个所述分拣运输带240中的一个连接;
26.所述餐盘识别装置210设置在所述转向台220的上方,用于识别在所述转移运输带230上的餐盘的种类;
27.所述转向台220与所述餐盘识别装置210信号连接,所述转向台220用于根据餐盘识别装置210的识别结果调整转移运输带230与多个分拣运输带240中的其中一个连接;
28.所述收集机构300设置在各个所述分拣运输带240的输出端,所述收集机构300用于收集所述分拣机构200输出的餐盘。
29.在本实用新型中,当运输机构100将餐盘运输到转移运输带230后,餐盘识别装置210对转移运输带230上餐盘进行识别,识别出餐盘的种类后,并根据餐盘的种类判断出该餐盘应该送入哪一条分拣运输带240上,然后利用转向台220转动转移运输带230,使转移运输带230的终端与判断结果相应的分拣运输带240连接,转移运输带230将餐盘转运到分拣运输带240上,最后利用分拣运输带240将餐盘输送到收集机构300内进行收集。实现自动分拣餐盘,有效降低人为操作失误,使餐盘的分类更为精确方便,提高餐盘的收集效率。其中,在一个实施例中,餐盘识别装置210包括扫码装置,餐盘的边沿设有二维码或条形码,扫码装置通过扫描餐盘的二维码或条形码即可识别出餐盘的种类。当转移运输带230上的餐盘转移到分拣运输带240后,转向台220复位转动,以使转移运输带230的始端与运输机构100的输出端继续相接,以使下一个餐盘能输送到转移运输带230上。
30.作为一种可选的实施例,所述转向台220包括托架221、驱动电机222和第一控制器223;所述托架221水平设置,所述转移运输带230安装在所述托架221上,所述驱动电机222与所述托架221连接并能带动托架221水平转动,所述第一控制器223与所述驱动电机222信号连接。所述第一控制器223向驱动电机222发出转动指令,所述驱动电机222执行所述第一控制器223发出的指令。
31.具体地,在本实用新型的一个实施例中,驱动电机222的输出轴竖直设置,且与所述托架221的中心底部连接,驱动电机222的输出轴转动时,实现带动托架221水平转动。其中,第一控制器223用于根据餐盘识别装置210的判断结果控制驱动电机222的转动角度,以使转移运输带230能与各个分拣运输带240连接。且第一控制器223可采用设定时间值的方式复位托架221,例如当驱动电机222驱动托架221转动后2s后,第一控制器223控制驱动电机222反向转动相应的角度以使转移运输带230复位与运输机构100相接。
32.作为一种可选的实施例,所述收集机构300包括升降台310、升降气缸320和第二控制器330,所述升降台310上下升降地设置在所述分拣运输带240的终端,所述升降气缸320与所述升降台310连接并能带动升降台310上升和下降,所述第二控制器330与所述升降气缸320信号连接。所述第二控制器330向所述升降气缸320发出上升或下降指令,所述升降气
缸320执行所述第二控制器330发出的指令。
33.在本实用新型的可选实施例中,初始时,收集机构300的升降台310高出分拣运输带240一个餐盘的高度,当餐盘识别装置210判定出餐盘应进入该收集机构300所对应的分拣运输带240时,第二控制器330控制升降气缸320下降一个餐盘高度,使升降台310与分拣运输带240相持平,分拣运输带240输出餐盘时,餐盘会相抵在升降台310上。当餐盘识别装置210判定出下一个餐盘也应进入该收集机构300所对应的分拣运输带240时,第二控制器330再次控制升降气缸320下降一个餐盘高度,使升降台310上的顶部餐盘与分拣输送带相持平,如此循环便能实现餐盘堆叠,提高餐盘收集的整理度。
34.作为一种可选的实施例,所述餐盘识别装置210包括机器视觉相机211和处理器212,所述机器视觉相机211与所述处理器212连接,所述处理器212分别与所述第一控制器223和所述第二控制器330连接。
35.具体地,在本实用新型的实施例中,利用机器视觉相机211对转移运输带230上的餐盘进行拍照,将餐盘相片发送至处理器212中,处理器212通过ai识别软件,对餐盘相片进行识别,从而识别出餐盘的种类,结合餐盘的分拣逻辑,根据餐盘种类判断出该餐盘应该运输到哪一个分拣运输带240。处理器212将判断结果发送到第一控制器223和第二控制器330上。在本实施例中,利用ai算法识别餐盘种类,无需在餐盘上贴设二维码和条形码,能有效解决餐盘在清洗过程中条形码或二维码损坏而导致餐盘识别装置210不能识别出餐盘种类的技术问题。
36.作为一种可选的实施例,所述第一控制器223和第二控制器330为plc控制装置。
37.plc控制装置具有很好的操作稳定性、控制信号稳定和集成空间小的特点,进而使得所述自动运输系统具有运行更加稳定、精准和安装空间小的特点。
38.作为一种可选的实施例,所述运输机构100包括餐盘运输带110、第一转向调整导柱120和第二转向调整导柱130,所述餐盘运输带110的宽度大于或等于餐盘的宽度,且小于餐盘的长度;所述第一转向调整导柱120竖立设置在所述餐盘运输带110的一侧,所述第二转向调整导柱130竖立设置在所述餐盘运输带110的另一侧,且所述第二转向调整导柱130设置在所述第一转向调整柱的下游。
39.具体地,由于餐盘运输带110的宽度大于或等于餐盘的宽度,且小于餐盘的长度,如此当餐盘是横向或倾斜运输时,都会出现餐盘的两侧超出餐盘运输带110的两侧。如此,当餐盘向前运输时,超出部分会相抵在第一转向调整导柱120或第二转向调整导柱130,并绕相抵触进行转动,实现餐盘转向,如此实现餐盘竖向运输,统一餐盘的运输方向,以利于收集机构300进行收集。
40.作为一种可选的实施例,所述运输机构100还包括对中组件140,所述对中组件140位于第二所述转向调整导柱的下游处;所述对中组件140包括第一气缸141、第二气缸142、传感器143和第三控制器144,所述第一气缸141与所述第二气缸142相对设置在餐盘运输带110的两侧,且所述第一气缸141和所述第二气缸142的输出端相对伸出设置,所述传感器143设置在第一气缸141与第二气缸142之间的餐盘运输带110区段的上方,所述传感器143与所述第三控制器144连接,所述第三控制器144与所述第一气缸141和所述第二气缸142信号连接。
41.具体地,如图5所示,由于第一转向调整导柱120和第二转向调整导柱130的调整,
餐盘会出现偏向餐盘运输带110的一侧。在本实施例中,当餐盘输送到传感器143的下方时,传感器143会将触发信号发送至第三控制器144,第三控制器144接收到触发信号后同步地控制第一气缸141和第二气缸142伸出其伸缩端,实现将餐盘推到餐盘运输带110的中部,当第一气缸141和第二气缸142分别触碰到餐盘后,第三控制器144分别驱动第一气缸141和第二气缸142缩回其伸缩端。如此,餐盘在餐盘运输带110的中部运输,使餐盘在转移运输带230上的位置相对稳定,进一步利于后续收集机构300对餐盘进行整理。其中所述第三控制器144可以是plc控制器。
42.作为一种可选的实施例,所述第一转向调整导柱120和第二转向调整导柱130的侧壁分别套设有弹性海绵。优选地,通过在第一转向调整导柱120和第二转向调整导柱130的侧壁设置弹性海绵,以缓冲餐盘与之间的碰撞,以避免餐盘、第一转向调整导柱120和第二转向调整导柱130损坏变形。
43.根据本实用新型实施例的一种餐盘分拣装置的其他构成等以及操作对于本领域普通技术人员而言都是已知的,这里不再详细描述。
44.在本说明书的描述中,参考术语“实施例”、“示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
45.尽管已经示出和描述了本实用新型的实施例,本领域的普通技术人员可以理解:在不脱离本实用新型的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1