一种黑白棋子自动分拣系统及其方法
本发明涉及工业分拣机器人,尤其是涉及一种黑白棋子自动分拣系统及其方法。
背景技术:
1、近年来工业机器人发展迅速,其中,自动分拣机器人的发展趋势也稳步上升,工业自动化为人们的生活提供了很多便利,尽管相较于之前传统手工分拣的作业效率,人力工作强度大大降低,但目前市场上的自动分拣机器人在实现自动化分拣的同时仍需要人工的参与帮助,无法有效提高自动分拣的效率以及准确性。
2、此外,在物流运输过程中,现有技术大多采用自动输送分拣设备对包裹进行分拣操作,但这种自动输送分拣设备主要由输送线以及分拣机组成,仅仅针对于体积较大的包裹物体进行分拣操作,而无法适用于体积较小的物体分拣操作,比如对围棋的黑白棋子进行分拣操作时,一方面无法保证对棋子的准确抓取,另一方面也难以准确区分黑白棋子,此外,用户也不能及时准确获知当前分拣状态。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种黑白棋子自动分拣系统及其方法,能够准确区分黑白棋子并进行可靠地抓取分拣操作,同时能方便用户及时准确获知当前分拣状态。
2、本发明的目的可以通过以下技术方案来实现:一种黑白棋子自动分拣系统,包括通信连接的移动端和控制端,所述控制端连接有检测单元和驱动单元,所述驱动单元与机械臂相连接,所述移动端用于接收用户的操作指令,并传输至控制端;以及展示当前分拣状态;
3、所述检测单元用于识别区分棋子的颜色,并将识别结果传输至控制端;
4、所述控制端根据接收的操作指令以及检测单元输出的识别结果,分析得到分拣状态信息以及相应的控制指令,并将分拣状态信息传输至移动端、将控制指令传输至驱动单元,由驱动单元相应调节改变机械臂的动作姿态;
5、所述机械臂在驱动单元的作用下完成对棋子的抓取分拣操作。
6、进一步地,所述控制端通过蓝牙模块与移动端通信连接,以实现控制端与移动端之间的数据信息交互。
7、进一步地,所述驱动单元包括送料舵机以及分拣舵机。
8、进一步地,所述送料舵机和分拣舵机均为mg90s舵机。
9、进一步地,所述控制端设置有计数模块,所述计数模块根据检测单元输出的识别结果,统计出相应的分拣状态信息。
10、进一步地,所述控制端还连接有液晶显示屏,用于实时显示当前分拣状态信息。
11、进一步地,所述检测单元包括光电传感器和处理单元,所述光电传感器用于采集棋子的光电信号,所述处理单元用于识别出光电信号对应的棋子颜色。
12、进一步地,所述控制端包括arduino uno板,所述蓝牙模块的tx端连接arduinouno板的3号引脚、rx端连接arduino uno板的4号引脚;所述光电传感器连接arduino uno板的a0引脚;所述液晶显示屏连接arduino uno板的a4引脚和a5引脚;所述送料舵机连接arduino uno板的11号引脚,所述分拣舵机连接arduino uno板的12号引脚。
13、一种黑白棋子自动分拣方法,包括以下步骤:
14、s1、移动端接收用户输入的操作指令,并将操作指令传输至控制端,其中,操作指令包括启动指令、停止指令以及重置指令;
15、s2、若控制端接收到启动指令,则控制端输出第一控制信号给驱动单元,使驱动单元相应动作驱动机械臂将待分拣的棋子抓取;
16、检测单元对待分拣的棋子颜色进行识别,并将识别结果传输至控制端,控制端根据识别结果进行分拣状态信息的实时更新显示,并将分拣状态信息传输至移动端进行展示;
17、控制端输出第二控制信号给驱动单元,是驱动单元相应动作驱动机械臂将待分拣的棋子移动放入对应颜色的位置;
18、s3、若控制端接收到停止指令,则控制端输出暂停信号给驱动单元、机械臂停止动作;
19、s4、若控制端接收到重置指令,则控制端输出重置信号给驱动单元、驱动单元恢复初始状态,同时控制端对当前分拣状态信息进行清零。
20、进一步地,所述步骤s2中检测单元对待分拣的棋子颜色进行识别的具体过程为:通过光电传感器采集待分拣的棋子对应的光电信号,若光电信号为高电平,则判断识别棋子颜色为白色,若光电信号为低电平,则判断识别棋子颜色为黑色。
21、与现有技术相比,本发明通过设置通信连接的移动端和控制端,其中,控制端连接有检测单元和驱动单元、驱动单元与机械臂相连接,利用移动端接收用户的操作指令,并传输至控制端;利用检测单元识别区分棋子的颜色;利用控制端根据接收的操作指令以及检测单元输出的识别结果,分析得到分拣状态信息以及相应的控制指令,并将分拣状态信息传输至移动端进行展示、将控制指令传输至驱动单元,由驱动单元相应调节改变机械臂的动作姿态,从而完成对棋子的抓取分拣操作。由此能够自动、高效地完成棋子分拣,无需人工辅助,能够准确区分黑白棋子并进行可靠地抓取分拣操作,同时方便用户及时准确获知当前分拣状态。
22、本发明在驱动单元设置送料舵机和分拣舵机,当控制端接收到移动端的相应操作指令后,能够精确驱动机械臂完成棋子抓取以及分拣操作,实现远程控制并获知当前分拣状态的目的。
23、本发明利用光电传感器采集棋子对应的光电信号,通过对光电信号的高低电平进行区分,以识别出棋子的黑白颜色,能够低成本且可靠地保证棋子颜色区分的准确性。
24、本发明在控制端采用arduino uno板作为主控板,通过将蓝牙模块、送料舵机、分拣舵机、液晶显示屏、光电传感器等对应连接至arduino uno板相应引脚,由此能够低成本地构建出一套完整且可靠的黑白棋子自动分拣系统。
技术特征:
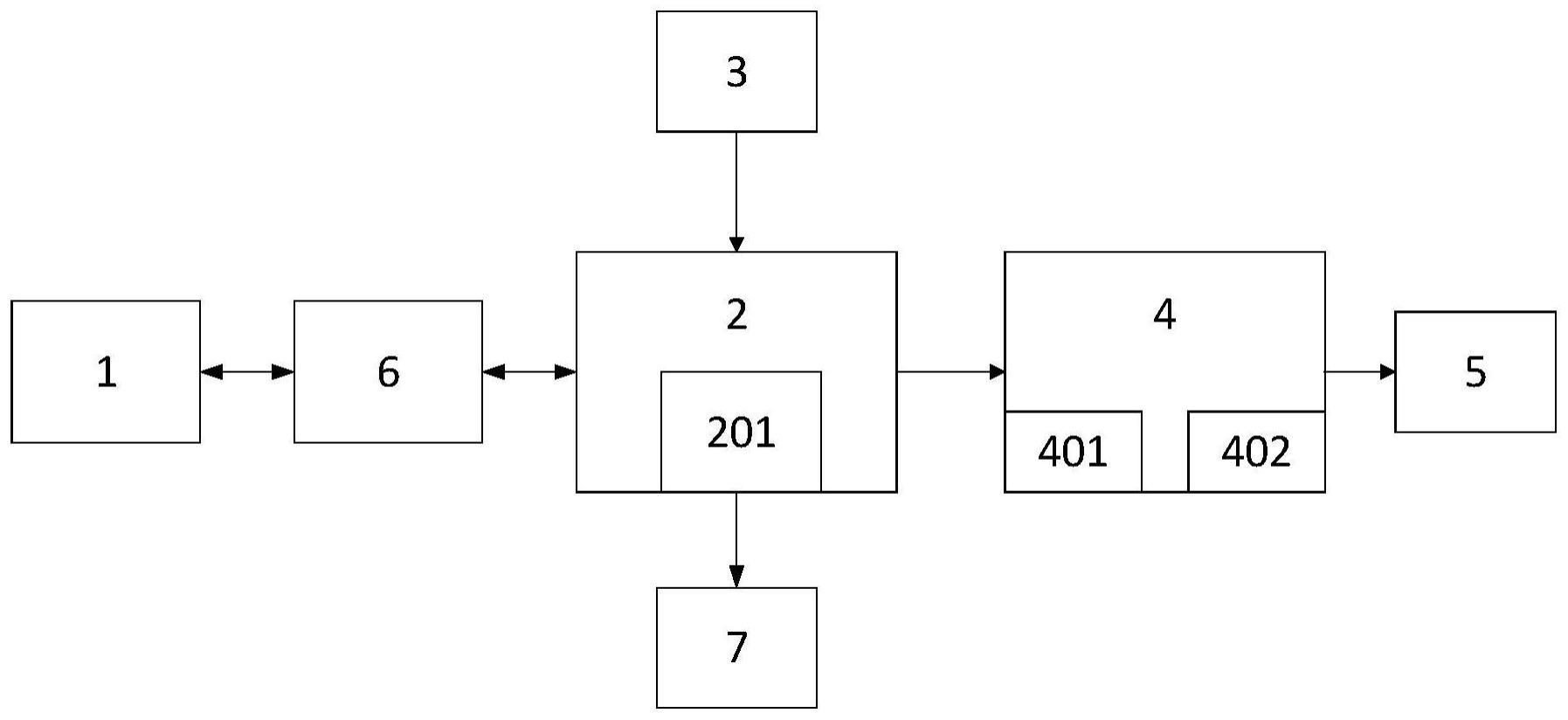
1.一种黑白棋子自动分拣系统,其特征在于,包括通信连接的移动端(1)和控制端(2),所述控制端(2)连接有检测单元(3)和驱动单元(4),所述驱动单元(4)与机械臂(5)相连接,所述移动端(1)用于接收用户的操作指令,并传输至控制端(2);以及展示当前分拣状态;
2.根据权利要求1所述的一种黑白棋子自动分拣系统,其特征在于,所述控制端(2)通过蓝牙模块(6)与移动端(1)通信连接,以实现控制端(2)与移动端(1)之间的数据信息交互。
3.根据权利要求2所述的一种黑白棋子自动分拣系统,其特征在于,所述驱动单元(4)包括送料舵机(401)以及分拣舵机(402)。
4.根据权利要求3所述的一种黑白棋子自动分拣系统,其特征在于,所述送料舵机(401)和分拣舵机(402)均为mg90s舵机。
5.根据权利要求1所述的一种黑白棋子自动分拣系统,其特征在于,所述控制端(2)设置有计数模块(201),所述计数模块(201)根据检测单元(3)输出的识别结果,统计出相应的分拣状态信息。
6.根据权利要求3所述的一种黑白棋子自动分拣系统,其特征在于,所述控制端(2)还连接有液晶显示屏(7),用于实时显示当前分拣状态信息。
7.根据权利要求6所述的一种黑白棋子自动分拣系统,其特征在于,所述检测单元(3)包括光电传感器和处理单元,所述光电传感器用于采集棋子的光电信号,所述处理单元用于识别出光电信号对应的棋子颜色。
8.根据权利要求7所述的一种黑白棋子自动分拣系统,其特征在于,所述控制端(2)包括arduino uno板,所述蓝牙模块(6)的tx端连接arduino uno板的3号引脚、rx端连接arduino uno板的4号引脚;所述光电传感器连接arduino uno板的a0引脚;所述液晶显示屏(7)连接arduino uno板的a4引脚和a5引脚;所述送料舵机(401)连接arduino uno板的11号引脚,所述分拣舵机(402)连接arduino uno板的12号引脚。
9.一种黑白棋子自动分拣方法,其特征在于,包括以下步骤:
10.根据权利要求9所述的一种黑白棋子自动分拣方法,其特征在于,所述步骤s2中检测单元对待分拣的棋子颜色进行识别的具体过程为:通过光电传感器采集待分拣的棋子对应的光电信号,若光电信号为高电平,则判断识别棋子颜色为白色,若光电信号为低电平,则判断识别棋子颜色为黑色。
技术总结
本发明涉及一种黑白棋子自动分拣系统及其方法,该系统包括通信连接的移动端和控制端,控制端连接有检测单元和驱动单元,驱动单元与机械臂连接,移动端用于接收用户的操作指令,并传输至控制端;以及展示当前分拣状态;检测单元用于识别区分棋子的颜色,并将识别结果传输至控制端;控制端根据接收的操作指令以及检测单元输出的识别结果,分析得到分拣状态信息以及相应的控制指令,并将分拣状态信息传输至移动端、将控制指令传输至驱动单元,由驱动单元相应调节改变机械臂的动作姿态,从而完成对棋子的抓取分拣操作。与现有技术相比,本发明能够自动、高效、准确区分黑白棋子并进行可靠地抓取分拣操作,同时能方便用户及时准确获知当前分拣状态。
技术研发人员:范培英,韩琦
受保护的技术使用者:上海建桥学院有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!