分选系统
本发明涉及智能制造,尤其涉及一种分选系统。
背景技术:
1、目前,在部分工件的分选过程中,通常采用工业机器人通过机械臂进行抓取,抓取后之间进行码垛等处理。从而使得:一方面,工业机器人执行机械臂抓取及分类更多是应用于最终成品阶段而很少用于中间态的分选;另一方面,工业机器人及机械臂的部署需要占据比较大的空间,而且造价昂贵,不适合粽叶等农产品的分选。
2、与此同时,部分农产品物料的筛选还采用大量人工进行分级筛选,由于标准很难量化统一,容易导致工作效率低下、人工成本高且筛分精度低等诸多问题。
技术实现思路
1、本发明目的在于公开一种分选系统,以降本增效的方式确保分选的精度。
2、为达上述目的,本发明公开的分选系统包括:
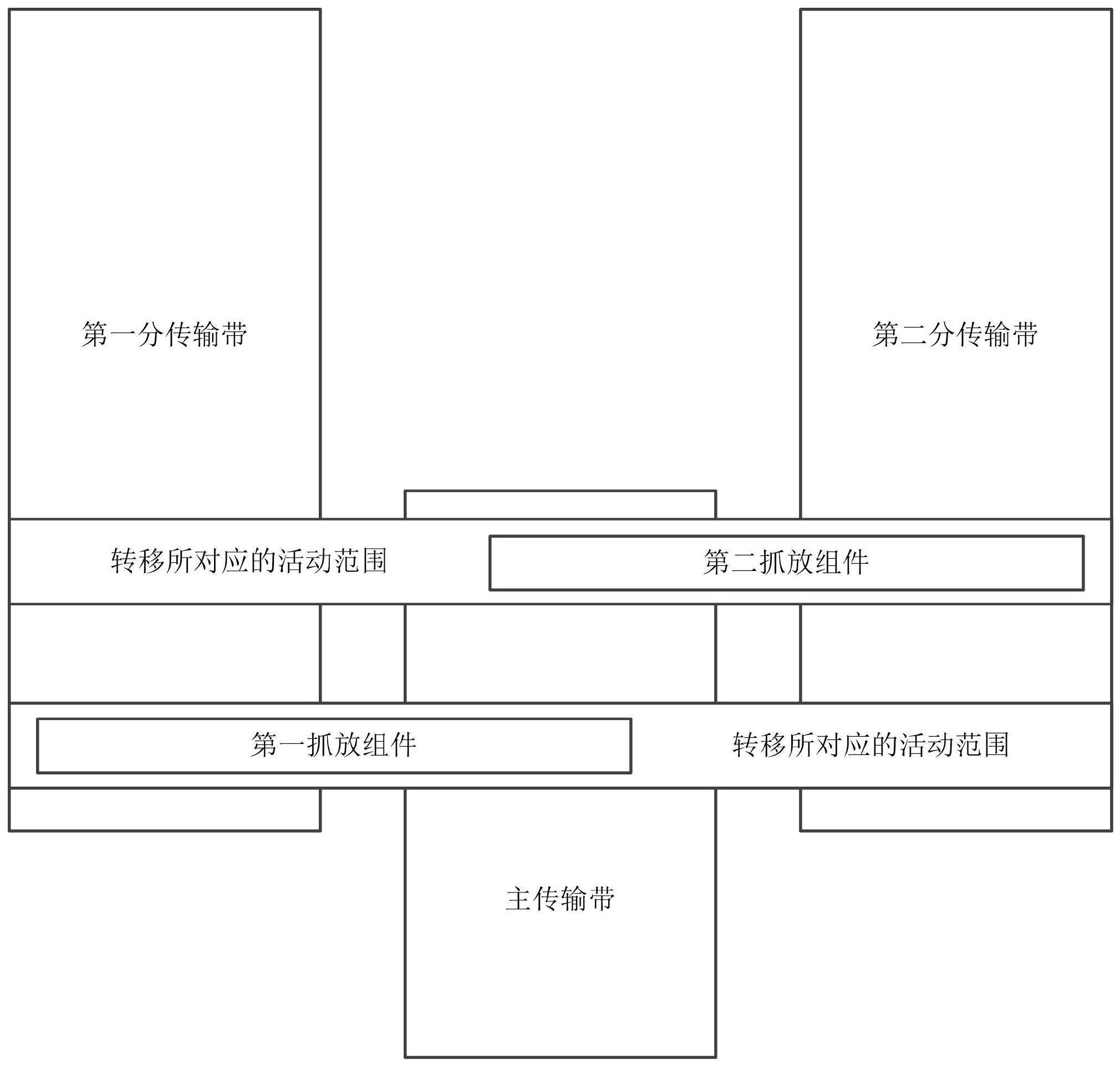
3、部署于主传输带上空的第一抓放组件和第二抓放组件;
4、所述第一抓放组件包括第一抓放模块和第二抓放模块,所述第一抓放模块包括第一抓放单元和第二抓放单元,第二抓放模块包括第三抓放单元和第四抓放单元;
5、所述第二抓放组件包括有第三抓放模块和第四抓放模块,所述第三抓放模块包括第五抓放单元和第六抓放单元,第四抓放模块包括第七抓放单元和第八抓放单元;
6、与所述主传输带平行并分设于所述主传输带左右两侧的第一分传输带和第二分传输带;所述第一分传输带和第二分传输带上各设置有同步启停的两条平行的子传输带;
7、所述第一抓放模块还设有驱动所述第一抓放单元和第二抓放单元同步以各自的抓放中心为圆心进行旋转的功能单元,以能实现将所述主传输带上前后相间隔的两片物料同步转移至所述第一分传输带的两子传输带上进行左右呈列;
8、所述第二抓放模块还设有驱动所述第三抓放单元和第四抓放单元同步以各自的抓放中心为圆心进行旋转的功能单元,以能实现将所述主传输带上前后相间隔的两片物料同步转移至所述第二分传输带的两子传输带上进行左右呈列;
9、所述第三抓放模块还设有驱动所述第五抓放单元和第六抓放单元同步以各自的抓放中心为圆心进行旋转的功能单元,以能实现将所述主传输带上前后相间隔的两片物料同步转移至所述第一分传输带的两子传输带上进行左右呈列;
10、所述第四抓放模块还设有驱动所述第七抓放单元和第八抓放单元同步以各自的抓放中心为圆心进行旋转的功能单元,以能实现将所述主传输带上前后相间隔的两片物料同步转移至所述第二分传输带的两子传输带上进行左右呈列;
11、所述第一抓放组件所对应抓取区域与所述第二抓放组件所对应抓取区域之间的垂直距离等于所述主传输带传输步长的二倍;所述第一分传输带和所述第二分传输带的传输步长、传输速度及启停时间都与所述主传输带一致;
12、其中,在所述主传输带任一传输步长的时间内,若所述第一抓放模块向左侧的所述第一分传输带转移,则所述第四抓放模块向右侧的所述第二分传输带转移;且在所述主传输带下一个传输步长所对应的时间内,所述第二抓放模块向右侧的所述第二分传输带转移,所述第三抓放模块向左侧的所述第一分传输带转移;或者
13、若所述第二抓放模块向右侧的所述第二分传输带转移,则所述第三抓放模块向左侧的所述第一分传输带转移;且在所述主传输带下一个传输步长所对应的时间内,所述第一抓放模块向左侧的所述第一分传输带转移,所述第四抓放模块向右侧的所述第二分传输带转移;
14、其中,在转移前后,所述第一抓放模块与所述第二抓放模块之间的参考距离一致;且当所述第一抓放模块落位所述第一分传输带正上方时,所述第二抓放模块落位所述主传输带正上方;或者当所述第一抓放模块落位所述主传输带正上方时,所述第二抓放模块落位所述第二分传输带正上方;以及
15、在转移前后,所述第三抓放模块与所述第四抓放模块之间的参考距离一致;且当所述第三抓放模块落位所述第一分传输带正上方时,所述第四抓放模块落位所述主传输带正上方;或者当所述第三抓放模块落位所述主传输带正上方时,所述第四抓放模块落位所述第二分传输带正上方;
16、所述系统还包括:
17、部署于所述主传输带上的视觉处理模块;以及
18、用于对各抓放单元的抓放状态单独控制并与所述视觉处理模块连接的主控模块;
19、所述视觉处理模块用于以所述主传输带上相邻的前后两片物料为一组判别依次经过的各片物料所处的分类,并将判别结果传输给所述主控模块;
20、所述主控模块还用于根据所述视觉处理模块传送的当前组的分类结果和之前剩余组的已分配情况,计算用于将当前组内两片物料转移至相对应分传输带的两个目标抓放单元;然后在当前组内物料抵达所述第一抓放组件和/或第二抓放组件的抓取区域后,控制相对应的目标抓放单元执行对应的抓放处理。
21、本发明具有以下有益效果:
22、1、能实现精准的一分二,且在第一和第二两个分传输带各提供平行的两个子传输带,为后续的二分四的分类垫定了基础。
23、2、各传输带之间的传输步长、传输速度及启停时间一致,简化了第一抓放组件和第二抓放组件在物料转移过程中的复杂度。
24、3、第一抓放组件和第二抓放组件在工作过程中形成上互补;例如,当同组的两片粽叶中不同类时,则可由第一抓放模块先转移一类,剩下的留给第二抓放组件来转移。
25、4、两个抓放组件都能实现将主传输带上的粽叶转移至任一分传输带;且同一抓放组件中,当其中一个抓放模块在将抓取的粽叶释放到分传输带时,另一个抓放模块能抓取主传输带上的粽叶;且各抓放模块在抓取主传输带粽叶时,两个抓放单元存在都抓、都不抓及任意一个抓共四种情况。前述组合特征结合第一抓放组件和第二抓放组件所对应抓取范围之间的垂直距离等于二倍传输带的步长、以及一分二过程中的姿态旋转的共同作用,使得本发明系统可应对各组粽叶在一分二过程中的各种逻辑组合;即使一长串主传输带上的粽叶都处于左侧或右侧的同一分类,也可以通过第二抓放模块的补抓及插空处理,使得相应分传输带上的粽叶按规则排布;确保后续二分四的转移过程中也有可靠的位置信息。
26、综上,本发明系统可实现以降本增效的方式确保分选的精度。
27、下面将参照附图,对本发明作进一步详细的说明。
技术特征:
1.一种分选系统,其特征在于,包括:
2.根据权利要求1所述的系统,其特征在于,用于分选的物料为粽叶。
3.根据权利要求2所述的系统,其特征在于,所述主传输带、第一分传输带和第二分传输带都采用负压传送以保持同一传输带中的姿态不变。
4.根据权利要求3所述的系统,其特征在于,各抓放单元设置有旋转支架、位于旋转支架底部的吸盘,且用于对旋转支架执行旋转处理的功能单元还用于执行对所述旋转支架的升降处理。
5.根据权利要求4所述的系统,其特征在于,各吸盘内的顶部设有中空的用于施加“放”状态作用力的气管。
6.根据权利要求1至5任一所述的系统,其特征在于,各物料在所述主传输带传送时,相应的中心线垂直于所述主传输带的前进方向,各物料所述第一分传输带或第二分传输带传送时,中心线与子传输带的前进方向平行。
技术总结
本发明涉及智能制造技术领域,公开一种分选系统,以降本增效的方式确保分选的精度。系统包括:在一分二的过程中,两个抓放组件都能实现将主传输带上的粽叶转移至任一分传输带;同一抓放组件中,当其中一个抓放模块在将抓取的粽叶释放到分传输带时,另一个抓放模块能抓取主传输带上的粽叶;且抓放模块各抓放单元的抓放状态独立。结合第一抓放组件和第二抓放组件所对应抓取范围之间的垂直距离等于二倍传输带的步长、以及一分二过程中的姿态旋转的共同作用,使得本发明系统可应对各组粽叶在一分二过程中的各种逻辑组合并确保后续二分四的转移过程中也有可靠的位置信息。
技术研发人员:汤哲,邓力元,曾涛,陈华荣,周建勇
受保护的技术使用者:中南大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!