小型快递驿站货物分拣机器人
1.本实用新型涉及机器人技术领域,更具体地说,本实用新型涉及小型快递驿站货物分拣机器人。
背景技术:
2.分拣机器人通过设置传感器、物镜和电子光学系统,可以快速进行货物分拣的工作,且无需人员辅助操作,一般应用在大型货物仓库,像货物中转站等区域,可以使货物分拣有序进行,大大提高了工作效率,随着物流行业发展壮大,在物流末端一般配备有快递驿站,方便周遭人员进行货物的接收工作,且为货物滞留提供较长的时间,可以在顾客不能及时接收货物的情况下,暂时替客户存放一段时间。
3.在驿站入库货物的过程中,管理人员一般会根据包裹的大小、重量进行货物的区分工作,然后对货物进行编码并码摞在相应的区域内,驿站货物较多,人员来往频繁,现有分拣机器人在进行分拣工作时,容易受到撞击,导致机身倾倒,若不及时扶正,会导致货物堆积从而使驿站瘫痪。
技术实现要素:
4.为了克服现有技术的上述缺陷,本实用新型提供小型快递驿站货物分拣机器人,本实用新型所要解决的技术问题是:驿站货物较多,人员来往频繁,现有分拣机器人在进行分拣工作时,容易受到撞击,导致机身倾倒,影响机器人正常的分拣工作。
5.为实现上述目的,本实用新型提供如下技术方案:小型快递驿站货物分拣机器人,包括基座,所述基座的顶部设置有承托板,所述基座底端的中心设置有中央控制器,所述基座底端四周的中心分别固定连接有电动套管,所述电动套管的内部活动套接有电动伸缩杆,所述电动伸缩杆一侧的底部固定连接有支撑盘,所述基座两侧正面的底部均设置有行走轮,所述基座两侧背面的底部均设置有万向轮。
6.在一个优选地实施方式中,所述支撑盘的底端固定连接有多个防滑球,通过对防滑球的使用,有利于增加支撑盘底端与地面的摩擦力,便于借助电动伸缩杆从电动套管的内部伸出反向推动基座进行活动。
7.在一个优选地实施方式中,所述基座四周的顶部均设置有超声波发射器,所述超声波发射器的输出端与中央控制器的输入端进行连接,通过对超声波发射器的使用,有利于借助超声波原理控制基座与周围物体之间的距离。
8.在一个优选地实施方式中,所述基座底端的四周均开设有两个收纳槽,位于正面的两个所述收纳槽位于正面支撑盘的两侧,所述收纳槽的内部设置有收纳框,通过对收纳槽和收纳框的使用,便于将压力传感器安装在收纳槽的内部使基座成为一体。
9.在一个优选地实施方式中,位于正面的所述收纳槽内壁两侧顶端的中部和正面均固定连接有卡块,所述收纳框顶端两侧的中部和正面均开设有卡槽,四个所述卡块分别卡接在卡槽的内部,通过对卡块和卡槽的使用,便于进行收纳框的拆卸和安装工作。
10.在一个优选地实施方式中,所述收纳框的内部安装有转接块,所述转接块的一侧通过螺钉与收纳框的内部进行固定连接,所述转接块的截面为三角形,通过将转接块的截面设置成三角形,便于在基座倾斜后使启动球在柱形槽内滚动从而与压力传感器接触,从而利用中央控制器控制电动伸缩杆从电动套管的内部伸出。
11.在一个优选地实施方式中,所述转接块顶端的一侧通过螺钉固定连接有启动条,所述启动条的内部开设有柱形槽,所述柱形槽的内部滚动连接有启动球,所述转接块顶端的另一侧通过螺钉固定连接有压力传感器,所述压力传感器的输出端与中央控制器的输入端进行连接,所述启动球的外部与压力传感器的一侧进行活动连接,通过对柱形槽、启动球和压力传感器的使用,便于检测基座是否倾斜,并配合转接块可以检测基座的倾斜程度。
12.本实用新型的技术效果和优点:
13.本实用新型通过启动球在柱形槽的内部滚动,从而与启动条一侧的压力传感器接触,当压力传感器受压时,将信号传递给中央控制器由中央控制器控制电动伸缩杆从电动套管的内部伸出,使支撑盘与地面接触,防止基座向一侧倾倒,有效保证了基座工作的稳定性,提高了基座的抗碰撞强度。
附图说明
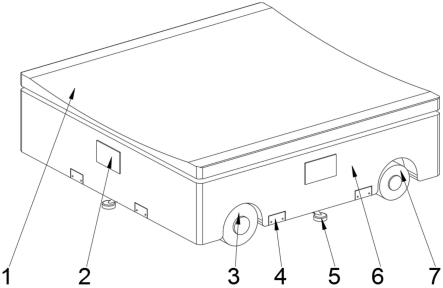
14.图1为本实用新型的右侧视图;
15.图2为本实用新型的仰视结构示意图;
16.图3为本实用新型图2中a部的放大结构示意图;
17.图4为本实用新型收纳框的内部结构示意图;
18.图5为本实用新型启动条与压力传感器的展开结构示意图。
19.附图标记为:1、承托板;2、超声波发射器;3、行走轮;4、收纳框;5、支撑盘;6、基座;7、万向轮;8、中央控制器;9、电动伸缩杆;10、防滑球;11、电动套管;12、卡块;13、收纳槽;14、转接块;15、启动条;16、卡槽;17、压力传感器;18、柱形槽;19、启动球。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.参照说明书附图1-5,该实施例的小型快递驿站货物分拣机器人,包括基座6,基座6底端的中心设置有中央控制器8,基座6底端四周的中心分别固定连接有电动套管11,电动套管11的内部活动套接有电动伸缩杆9,电动伸缩杆9一侧的底部固定连接有支撑盘5,支撑盘5的底端固定连接有多个防滑球10,通过对防滑球10的使用,有利于增加支撑盘5底端与地面的摩擦力,便于借助电动伸缩杆9从电动套管11的内部伸出反向推动基座6进行活动,基座6底端的四周均开设有两个收纳槽13,位于正面的两个收纳槽13位于正面支撑盘5的两侧,收纳槽13的内部设置有收纳框4,通过对收纳槽13和收纳框4的使用,便于将压力传感器17安装在收纳槽13的内部使基座6成为一体,收纳框4的内部安装有转接块14,转接块14顶端的一侧通过螺钉固定连接有启动条15,启动条15的内部开设有柱形槽18,柱形槽18的内
部滚动连接有启动球19,转接块14顶端的另一侧通过螺钉固定连接有压力传感器17,压力传感器17的输出端与中央控制器8的输入端进行连接,启动球19的外部与压力传感器17的一侧进行活动连接,通过对柱形槽18、启动球19和压力传感器17的使用,便于检测基座6是否倾斜,并配合转接块14可以检测基座6的倾斜程度,转接块14的一侧通过螺钉与收纳框4的内部进行固定连接,转接块14的截面为三角形,通过将转接块14的截面设置成三角形,便于在基座6倾斜后使启动球19在柱形槽18内滚动从而与压力传感器17接触,从而利用中央控制器8控制电动伸缩杆9从电动套管11的内部伸出,位于正面的收纳槽13内壁两侧顶端的中部和正面均固定连接有卡块12,收纳框4顶端两侧的中部和正面均开设有卡槽16,四个卡块12分别卡接在卡槽16的内部,通过对卡块12和卡槽16的使用,便于进行收纳框4的拆卸和安装工作。
22.实施场景具体为:
23.当基座6出现倾斜的情况时,活动连接在柱形槽18内部的启动球19在柱形槽18的内部滚动,从而与启动条15一侧的压力传感器17接触,当压力传感器17受压时,将信号传递给中央控制器8由中央控制器8控制电动伸缩杆9从电动套管11的内部伸出,使支撑盘5与地面接触,防止基座6向一侧倾倒,有效保证了基座6工作的稳定性,提高了基座6的抗碰撞强度,同时通过借助固定在支撑盘5底端的多个防滑球10,可以增加支撑盘5与地面之间的摩擦力,从而借助电动伸缩杆9伸出时的反向作用力,将基座6推离目标区域,有利于本实用新型恢复工作,此外,通过将转接块14设置成三棱块,使靠近中央控制器8一侧向远离中央控制器8的一侧带有向上的坡度,可以避免基座6小幅度振动的情况下启动球19在柱形槽18的内部滚动从而对压力传感器17施加压力。
24.参照说明书附图1、2,该实施例的小型快递驿站货物分拣机器人,包括基座6,基座6的顶部设置有承托板1,基座6四周的顶部均设置有超声波发射器2,超声波发射器2的输出端与中央控制器8的输入端进行连接,通过对超声波发射器2的使用,有利于借助超声波原理控制基座6与周围物体之间的距离,基座6两侧正面的底部均设置有行走轮3,基座6两侧背面的底部均设置有万向轮7。
25.实施场景具体为:
26.在进行本实用新型的使用时,通过利用行走轮3转动配合万向轮7可以使基座6在地面上运动,通过利用基座6四周的超声波发射器2发出超声波,借助超声波发射的时间,可以判定基座6与周围物体之间的距离,便于进行承托板1上货物的运输工作,效率较高。
27.最后:以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1