种植体的清洗、检测和分选一体化装置及检测方法与流程
本发明涉及种植体制造领域,特别涉及种植体的清洗、检测和分选一体化装置及检测方法。
背景技术:
1、目前,种植体的生产工序通常包括:机加工、清洗、尺寸外形检测和型号分选。首先加工人员参照加工图纸对棒料进行机加工,然后清洗人员对生产加工后的种植体进行清洗以清除油质和碎屑,下一步检测人员对种植体的尺寸和外形进行检验,最后包装人员根据种植体的型号进行分选并包装。
2、为了提高种植体的生产效率,实现无人车间建设,根据种植体的生产工序设计自动化生产线,由于机加工阶段通常采用机器完成,其改造容易实现,因此难点在于针对种植体的清洗及尺寸和外形检测阶段的改造。目前,暂无用于种植体自动化生产线的清洗、检测和分选一体化装置。
技术实现思路
1、本发明目的在于提供一种种植体的清洗、检测和分选一体化装置及检测方法,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
2、为解决上述技术问题所采用的技术方案:
3、一种种植体的清洗、检测和分选一体化装置,包括:
4、输送通道,其输送待测种植体;
5、转盘,其可转动地设置于所述输送通道的下方,所述转盘设有上下贯通的限位孔,所述限位孔的转动轨迹经过所述输送通道底端的下方;
6、限位件,其设于所述限位孔,所述限位件夹紧或松开所述限位孔中的待测种植体;
7、第一图像采集器,其位于所述转盘的上方,所述第一图像采集器用于采集所述限位孔中的待测种植体的俯视图像;
8、第二图像采集器,其位于所述转盘的外围,所述第二图像采集器用于采集所述限位孔中的待测种植体的侧视图像;
9、图像检测装置,其用于检测所述俯视图像与所述侧视图像。
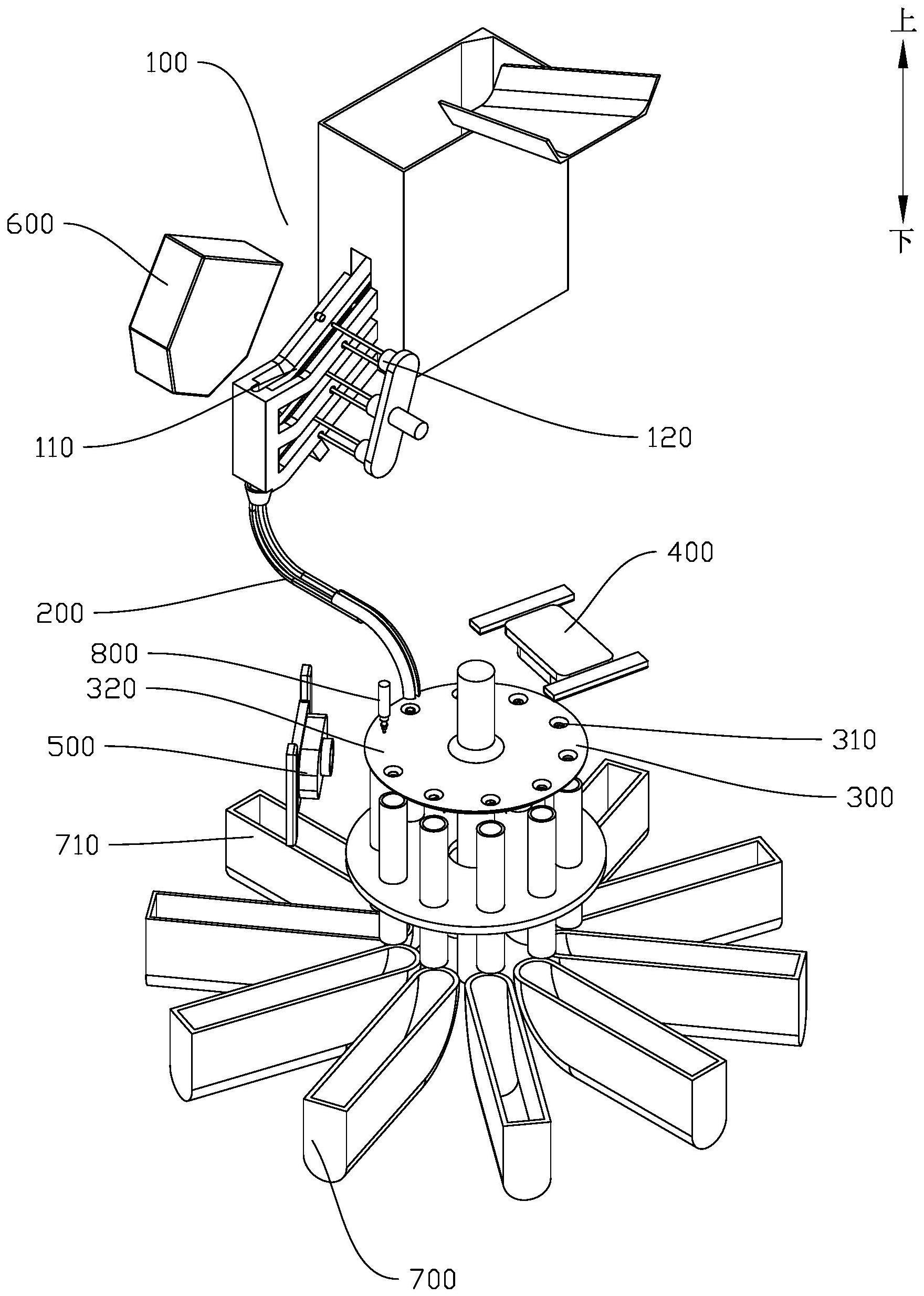
10、本发明的有益效果是:加工清洗后的待测种植体由输送通道从上往下输送到转盘的限位孔中,限位件夹紧限位孔中的待测种植体,随后转盘带动待测种植体转到第一图像采集器的下方,第一图像采集器采集待测种植体的俯视图像,转盘带动待测种植体转到第二图像采集器旁,第二图像采集器采集待测种植体的侧视图像,最后通过图像检测装置分别对俯视图像中待测种植体的接口尺寸以及侧视图像中的待测种植体外形轮廓尺寸进行检测,无需人工检测,清洗、检测、分选一体化装置,可实现种植体生产线无人化,大大提高种植体自动化生产线的自动化水平。
11、作为上述技术方案的进一步改进,所述种植体的清洗、检测和分选一体化装置还包括:
12、直径分选组件,其设有多个分选滑道,所述直径分选组件依照直径将待测种植体输送到对应的所述分选滑道中,所述输送通道的顶端连接多个所述分选滑道;
13、激光传感器,其检测头朝向多个所述分选滑道,所述激光传感器测量待测种植体到检测头的距离,所述激光传感器以恒定频率进行采样并根据待测种植体的长度获得多个采样点;
14、控制器,其根据所述激光传感器测量的距离和采样点数量得出待测种植体的直径和长度信息,所述控制器将所述直径和长度信息输送到所述图像检测装置;
15、所述图像检测装置储存有对应直径和长度的合格种植体的标准俯视图像与标准侧视图像,所述图像检测装置根据所述直径和长度信息调取相应的所述标准俯视图像与所述标准侧视图像,所述图像检测装置对比所述俯视图像与所述标准俯视图像、对比所述侧视图像与所述标准侧视图像。
16、通过直径分选组件将待测种植体输送到对应的分选滑道中,然后通过激光传感器测量待测种植体到检测头的距离,由于采样频率恒定,待测种植体越长激光传感器获得的采样点数量越多,根据激光传感器输出的采样点数量,控制器将长度型号信息输送到图像检测装置,使控制器能够根据上述距离以及采样点判断待测种植体的直径和长度信息,最后图像检测装置根据直径和长度信息调取相应的标准俯视图像与标准侧视图像,通过对比待测种植体的俯视图像与合格种植体的标准俯视图像、对比待测种植体的侧视图像与合格种植体的标准侧视图像,根据两者的相似度检测待测种植体是否合格;则种植体的清洗、检测和分选一体化装置能够同时检测不同直径和长度的待测种植体,大大提高种植体的检测效率。
17、作为上述技术方案的进一步改进,每个所述分选滑道设有清洗工位,所述种植体的清洗、检测和分选一体化装置还包括:
18、多个夹具,多个所述夹具一一对应设置于多个所述清洗工位上,所述夹具限位或松开位于所述清洗工位的待测种植体;
19、多个清洗吹干机构,多个所述清洗吹干机构一一对应设置于多个所述清洗工位上,所述清洗吹干机构喷出流体对待测种植体进行清洗及吹干。
20、在每个分选滑道的清洗工位设置夹具与清洗吹干机构,利用夹具限位待测种植体,以便于清洗吹干机构喷出流体对待测种植体进行清洗及吹干,避免待测种植体表面的油污与碎屑影响检测结果。
21、作为上述技术方案的进一步改进,所述分选滑道的侧壁与所述夹具配合后形成清洗空间,待测种植体在所述清洗空间中活动,所述清洗吹干机构包括至少两个喷头,两个所述喷头分别设置于所述清洗空间的上下两侧。
22、待测种植体可以在清洗空间中活动,当清洗吹干机构喷出流体对待测种植体进行清洗及吹干时,待测种植体在清洗空间中受流体的冲击而转动及移动,以便于清除待测种植体不同侧面的油污及碎屑;而位于清洗空间上下两侧的喷头,上侧的喷头用于清洗种植体冠端的接口及位于上侧的外侧壁,下侧的喷头用于清洗种植体顶端及外侧壁,提高清洗效果。
23、作为上述技术方案的进一步改进,所述控制器电性连接于所述激光传感器与所述转盘,所述限位孔有多个,多个所述限位孔与多个所述直径和长度信息一一对应,每个所述限位孔的内锥锥度与对应的待测种植体外锥锥度一致,所述控制器根据所述直径和长度信息将对应的所述限位孔转动到所述输送通道底端的下方。
24、控制器根据直径和长度信息将对应锥度的限位孔转动到输送通道底端的下方,以便于待测种植体掉落到相应锥度的限位孔中,使待测种植体被相应的限位件稳固地装配于限位孔中,避免在第一图像采集器与第二图像采集器采集图像的过程中待测种植体松动,防止待测种植体的俯视图像及侧视图像歪斜,提高图像比对的准确性。
25、作为上述技术方案的进一步改进,所述种植体的清洗、检测和分选一体化装置还包括:
26、多个良品槽,多个所述良品槽间隔分布于所述限位孔的转动轨迹下方;
27、次品槽,其设于所述限位孔的转动轨迹下方。
28、控制器控制转盘转动,使合格种植体随着限位孔转动到对应的良品槽中,将合格的种植体根据直径型号分装到不同良品槽,实现种植体的型号分选,而不合格的种植体放入次品槽中。
29、作为上述技术方案的进一步改进,每个所述分选滑道设有上下贯通的开槽,多个所述开槽沿上下方向间隔分布,多个所述开槽的宽度从上往下依次递减,所述激光传感器位于多个所述开槽的斜上方。
30、分选滑道的开槽用于分选不同直径的待测种植体,由于多个开槽的宽度从上往下依次递减,则待测种植体从上往下掉落直至由对应宽度的开槽限位,而激光传感器从多个开槽的斜上方对待测种植体进行检测,控制器根据激光传感器测量待测种植体的距离能够判断待测种植体所在的开槽位置,进而使控制器输出待测种植体的直径型号信息到图像检测装置中,同时由于激光传感器采样频率是固定的,因此越长的种植体,经过激光投射线的时间越长,因此采样的点数量越多,进而使控制器输出待测种植体的长度型号信息到图像检测装置中。
31、作为上述技术方案的进一步改进,所述限位件包括:
32、滑块,其滑动设置于所述限位孔中,所述滑块与所述限位孔的侧壁之间形成限位腔;
33、弹性件,其连接于所述滑块与所述限位孔,所述弹性件的弹力使所述滑块具有压缩所述限位腔的趋势;
34、驱动件,启动所述驱动件令所述滑块抵抗所述弹性件的弹力扩大所述限位腔。
35、待测种植体被限位于滑块与限位孔侧壁形成的限位腔中,启动驱动件使滑块松开待测种植体以便于待测种植体向下掉落。
36、一种检测方法,包括以下步骤:
37、s1、将标准种植体放入如上述的种植体的清洗、检测和分选一体化装置进行检测,得到所述标准种植体的标准俯视图像与标准侧视图像;
38、s2、待测种植体进入所述种植体的清洗、检测和分选一体化装置;
39、s3、所述第一图像采集器采集所述待测种植体的所述俯视图像,所述图像检测装置对比所述俯视图像与所述标准俯视图像得出俯视相似度;
40、s4、所述第二图像采集器采集所述待测种植体的所述侧视图像,所述图像检测装置对比所述侧视图像与所述标准侧视图像得出侧视相似度;
41、s5、所述图像检测装置设定俯视标准相似度与侧视标准相似度,若所述俯视相似度不小于所述俯视标准相似度及所述侧视相似度不小于所述侧视标准相似度则判定所述待测种植体合格,否则判定所述待测种植体不合格。
42、将标准的种植体放入种植体的清洗、检测和分选一体化装置中,得到标准俯视图像与标准侧视图像,使标准俯视图像与标准侧视图像更加接近种植体的清洗、检测和分选一体化装置实际检测的待测种植体采集的俯视图像与侧视图像,对比俯视图像与标准俯视图像得出俯视相似度更加准确、对比侧视图像与标准侧视图像得出的侧视相似度更加准确。
43、作为上述技术方案的进一步改进,在所述步骤s4中,所述图像检测装置测量所述待测种植体的接口角度与所述标准种植体的接口角度的差值为θ°,所述转盘具有旋转工位,所述转盘带动所述待测种植体到所述旋转工位中,所述种植体的清洗、检测和分选一体化装置还包括旋转件,所述旋转件设置于所述旋转工位的外围,启动所述旋转件带动所述待测种植体绕轴线转动,在所述步骤s5之前,所述旋转件带动所述待测种植体转动θ°。
44、根据图像检测装置测量待测种植体接口角度与标准种植体的接口角度的差值,然后转盘带动待测种植体到旋转工位中,通过旋转件带动待测种植体绕轴线转动θ°,使待测种植体朝向第二图像采集器的角度与标准种植体朝向第二图像采集器的角度一致,以确保第二图像采集器采集待测种植体的侧视图像与标准种植体的标准侧视图像更加相似,对比侧视图像与标准侧视图像得出的侧视相似度更加准确。
- 还没有人留言评论。精彩留言会获得点赞!