基于优化和非优化控制器例程的风力涡轮机控制的制作方法
1.本发明涉及对风力涡轮机的控制,特别是涉及对具有包括优化控制器单元(如mpc控制器单元)和非优化控制器单元的控制系统的风力涡轮机的控制。
背景技术:
2.风力涡轮机通常用于向电网供电。一般而言,风力涡轮机或风力涡轮机园区的运行目标是获得投资于其中的资本的最大收益,因此风力涡轮机控制系统被配置为最大化输出功率,即运行风力涡轮机以捕获风中可用的最大功率,并适当考虑将风力涡轮机保持在运行限制内。
3.存在不同类型的风力涡轮机,现代风力涡轮机通常是变速型的。对于这种风力涡轮机,发电机扭矩和叶片的桨距角被控制以根据设计参数和运行条件将诸如气动扭矩、转子速度和电功率的参数保持在运行包络内。
4.现代涡轮机由许多计算机化控制器运行,这些控制器基于输入信号确定致动器输出信号。许多涡轮机控制器被实现为pid类型的反馈控制器。pid类型的控制器是众所周知且可靠的控制器。风力涡轮机是在复杂、多变且通常不可预测的环境中运行的非常复杂的机器。因此,应用多输入多输出(mimo)类型的更先进的控制技术可能是一种优势。这种先进的控制器的一个示例是基于所谓的模型预测控制(mpc)方法论的控制器。
5.wo2011/076295公开了一种风力涡轮机,其具有控制方法和控制器,该控制方法和控制器用于基于在转子前方预先确定的距离处获得的风速对风力涡轮发电机执行预测控制(下文称为mpc)。
6.wo2016/023561公开了一种风力涡轮机,其具有:控制系统,其被布置为例如通过mpc控制器控制预测的控制轨迹;以及安全控制器,其用于根据安全模式控制轨迹控制风力涡轮机。安全模式控制轨迹可以由优化控制器计算也可以不由其计算。在本公开中,基于预测的控制轨迹或基于安全模式控制轨迹来控制风力涡轮机。
7.基于mpc的风力涡轮机控制面临着执行用于实时控制的mpc算法的相当复杂的计算的挑战,其中致动器设定点通常在几赫兹到100赫兹之间计算。
8.正是在这种背景下设计了本发明。
技术实现要素:
9.实现对风力涡轮机的能够支持对至少选定的控制特征的先进的基于模型的实时控制的控制将是有利的。
10.因此,在第一方面,提供了一种风力涡轮机控制系统,其包括:第一控制器单元,其实施模型预测控制(mpc)例程以计算预测运行信号的预测运行轨迹,其中轨迹包括至少一个变量的时间序列,并且其中轨迹包括预测的第一控制值;第二控制器单元,其实施用于计算第二控制值的非优化控制器;以及致动器控制器单元,其被布置为通过组合预测的第一控制值和第二控制值来确定致动器控制信号。
11.本发明的发明人已经意识到,致动器控制信号可以划分成子信号,这些子信号由根据不同控制原理实施的不同控制器单元确定。通过将致动器信号的一部分基于由mpc例程确定的值,可以为形成组合致动器控制信号的一部分的选定控制变量获得mpc的益处,而其他选定的控制变量可以通过在计算方面更简单的非优化控制类型来处理。以这种方式,mpc可以实时应用于风力涡轮机控制,而无需依赖现代风力涡轮机中不可用的计算能力。此外,一般而言,某些控制方面可由非优化控制例程有益地处理,而其他控制方面可由优化控制例程有益地处理。本发明的实施例从而允许选择用于不同控制任务的控制例程的类型,而不管涡轮机中可用的计算能力如何。
12.在这方面,非优化控制器应理解为基于输入确定输出的控制器,其中输出基于不能理解为数值优化的计算确定。特别地,它不是基于实时优化或在线优化。非优化控制器算法可以已经过预先调整(tuning),或者可以包括基于输入而变化的调整参数。这种调整不应被理解为优化。一般而言,非优化控制器可以基于算术计算、逻辑计算、反馈控制回路、前馈控制回路(下文称为pid、pi)或其他反馈控制器。
13.控制系统因此包括三个控制器单元,然而可以存在更多的单元。第一控制器单元为mpc控制器,第二控制器单元为基于非优化控制的经典控制器单元,第三控制器单元为致动器控制器。致动器控制器可以是用于风力涡轮机中的任何致动器(包括但不限于变桨致动器和动力致动器)的控制器。动力致动器可以是发电机
‑
转换器系统的元件,其对产生的发电机扭矩起决定性作用。发电机扭矩可以通过转换器控制器接收的功率设定点或扭矩设定点来控制,转换器控制器被布置为控制发电机
‑
转换器系统的相关元件。还可以设想更多的致动器,诸如主动空气动力学元件、机械阻尼元件等。
14.致动器控制信号通过组合预测的第一控制值和第二控制值获得。以这种方式,致动器控制信号包括来自第一控制值的信号贡献和来自第二控制值的信号贡献。第一控制值和第二控制值的组合可以通过适当的硬件来完成,然而它通常被实现为软件组合。该组合可以通过函数实现获得,其中数学函数将第一控制值和第二控制值作为输入,可选地连同其他值一起确定致动器控制信号。在一个实施例中,控制值的组合可以包括第一控制值和第二控制值相加以及第一控制值和第二控制值的加权相加。在实施例中,权重可以是标量权重,然而也可以根据风力涡轮机的运行点来调度(例如缩放)权重,诸如根据风速、转子速度、功率输出等来调度权重。在一般示例中,该组合可以包括叠加取决于第一控制值的数学函数和取决于第一控制值的数学函数。
15.控制系统可以处理两个以上的控制值并且产生的致动器控制信号可以基于多个预测控制值和由非优化控制器单元确定的多个其他控制值。
16.模型预测控制例程可以被实施用于在线优化(诸如实时优化)。第一控制器和第二控制器可以被实施为并行运行。这可以通过专用处理设备上的并行处理来实现,或者可以通过在相同处理设备上进行并行处理的适当编程来实现。
17.控制系统的各个控制器单元可以以不同的采样率运行,并且有利地,致动器控制器单元包括采样单元,该采样单元被布置为以第一采样率接收预测的第一控制值,并且被布置为以第二采样率接收第二控制值,并且其中采样单元被布置为调节预测的第一控制值和第二控制值中的至少一个的采样率,从而以输出采样率输出致动器控制信号。
18.在实施例中,致动器设定可以基于组合成单个致动器设定点的不同控制值。因此,
预测的控制值可以与第一控制值有关,而第二控制值可以与不同的第二控制值有关。例如,第一控制值可以与涉及控制转子的空气动力能量摄取的集体桨距值有关,而第二控制值可以与涉及抑制塔架振动的周期性桨距值(cyclic pitch value)有关。第二控制值还可以与由监管系统确定的值有关,以确保对给定涡轮机状态的快速反应。
19.在实施例中,第二控制值被确定为用于减少平面外转子力和/或减少塔架振动。
20.在实施例中,预测的第一控制值是用于设定集体桨距的控制值和用于设定输出功率的控制值中的至少一个。对于预测的第一控制值是用于设定集体桨距的控制值的情况,第二控制值可以是用于将周期性桨距变化叠加到集体桨距值上的周期性变化值。对于预测的第一控制值是用于设定输出功率的控制值的情况,第二控制值可以是用于将周期性功率变化叠加到输出功率上的周期性变化值。
21.在实施例中,控制系统可以通信地连接到监管系统,监管系统基于传感器输入和/或其他输入(诸如致动器状态输入)确定涡轮机状态,并将该涡轮机状态与各种运行限制或阈值进行比较。在这样的实施例中,第二控制值是与监管有关的值,用于确保鉴于风力涡轮机状态的预先定义的致动器控制信号在由相关联的监管系统监管的预先定义的运行状态之外。在一个实施例中,第二控制器单元接收来自监管系统的输入,并且基于该输入计算第二控制值。这可以有利地实现以确保对给定情况的快速反应。例如,对天气情况(例如大阵风)的快速反应,对故障部件的快速反应,或其他可能有利于确保快速致动器响应的情况。
22.有利地,控制系统考虑到优化问题的有效解不存在或者没有足够的计算能力可用以在可接受的时间内找到有效解的情况。在实施例中,第一控制器单元包括监测mpc例程的优化例程的故障单元,并且如果优化例程在预先确定的时间内没有提供优化的有效解,则故障单元发出故障信号。在一个实施例中,故障单元可以监测由mpc例程实现的求解器,以确保求解器提供有效解。
23.在实施例中,故障信号可以包括取代预测控制值的超驰(override)控制值,超驰控制值是最后确定的有效预测控制值。这可以确保,虽然没有可用的当前有效控制值,但是风力涡轮机仍然根据有效控制值被控制。先前确定的控制值可以是有效的,但有效性可能只会持续给定的时间。故障单元可以监测在未获得有效解的情况下通过的样本的数量,如果样本的数量大于预先定义的阈值,则故障信号为风力涡轮机的停机信号。以这种方式,可以确保涡轮机仅基于能够被分配高度确定的有效性的控制值来运行。
24.在第二方面,本发明涉及一种控制风力涡轮机控制系统的方法,该方法包括:使用模型预测控制(mpc)例程计算预测运行信号的预测运行轨迹,其中轨迹包括至少一个变量的时间序列,并且其中轨迹包括预测的第一控制值;使用非优化控制例程计算第二控制值;以及将预测的第一控制值和第二控制值组合成致动器控制信号。
25.在其他方面,本发明涉及包括根据第一方面的控制系统的风力涡轮机,以及包括软件代码的计算机程序产品,在所述软件代码在数据处理系统上执行时适于控制风力涡轮机,该计算机程序产品适于执行第二方面的方法。
26.该计算机程序产品可以提供在计算机可读存储介质上或可从通信网络下载。该计算机程序产品包括指令,所述计算机程序产品在加载到数据处理系统时使例如呈控制器的形式的数据处理系统执行该指令。
27.一般而言,控制器可以是包括一个或多个处理器、输入/输出接口和能够存储可由
处理器执行的指令的内存的单元或功能单元的集合。
28.一般而言,本发明的各个方面可以在本发明的范围内以任何可能的方式组合和耦合。参考下文描述的实施例,本发明的这些和其他方面、特征和/或优点将是显而易见的并得到阐明。
附图说明
29.将参考附图,仅以举例的方式描述本发明的实施例,其中:
30.图1示意性地示出了控制系统的实施例以及风力涡轮机的元件;
31.图2示出了风力涡轮机控制系统的实施例;
32.图3进一步示出了图2的实施例的元件;以及
33.图4示出了被实施以输出两个预测控制值的mpc控制器单元的实施例。
具体实施方式
34.图1示意性地示出了控制系统6的实施例以及风力涡轮机的元件。风力涡轮机包括转子叶片1,转子叶片1通过齿轮箱3机械连接到发电机2。在直接驱动系统和其他系统中,可以不存在齿轮箱。发电机2生成的电能经由电转换器5注入到电网4中。发电机2和转换器5可以基于满量程转换器架构或双馈感应发电机(dfig)架构,但也可以使用其他类型。
35.控制系统6包括多个元件(包括处理器和内存),使得控制系统的子单元能够基于存储在内存中的指令执行计算任务。通常,风力涡轮机控制器6确保在运行中风力涡轮机在设计限制内生成所请求的功率输出水平。这是通过调节桨距角和/或转换器的功率提取来获得的。为此,控制系统6使用桨距参考8指令变桨系统,并使用功率参考10指令功率系统。控制系统接收多个输入信号(在下文中是指每个转子叶片的桨距位置7、电网功率9、转子速度11)。此外,许多其他传感器值可用于控制系统的元件。在图中示出了两个转子叶片,然而可以使用任何数量的转子叶片(特别是三个转子叶片)。
36.风力涡轮机转子包括可以通过变桨机构变桨的转子叶片。转子可以包括同时调节所有转子叶片的所有桨距角的公共变桨系统,以及除此之外的能够使转子叶片单独变桨的单独变桨系统。公共变桨系统和单独变桨系统的划分在某种程度上是逻辑上的或基于控制器的,因为只有单个桨距参考被发送到叶片的每个变桨致动器。该单个桨距参考可以是公共桨距参考、单独桨距参考以及可能还有其他贡献的组合信号。同样,公共桨距参考和单独桨距参考可以基于来自不同确定的贡献。
37.公共桨距被设定为用于所有叶片的公共桨距设定,并且用于控制转子的气动扭矩和转子推力。单独桨距被设定为用于每个叶片的单独桨距设定。单独桨距可以实现为周期性桨距设定,其基于相位调节120
°
的公共参考值。如果叠加在集体桨距上,经相位调节的信号将施加周期性变化。单独变桨系统通常用于减载活动。
38.图2示出了风力涡轮机控制系统6的实施例,其包括:被实现为mpc控制器单元以计算预测控制值24的第一控制器单元20;以及被实现为计算第二控制值25的第二非优化控制器单元21。在图2和图3所示的实施例中,实现mpc控制器单元20以计算呈集体桨距参考形式的预测控制值,而实现第二控制器21以计算呈桨距信号形式的用于减少横向塔架振动的不同的第二控制值。这两个控制器被实施为并行运行,这意味着它们同时处于活动状态,能够
以独立的方式运行。
39.下面提供了替代实施方式的其他示例。
40.mpc(第一控制器单元)计算呈集体桨距参考形式的预测控制值24,并且横向塔架振动单元(第二控制器单元)计算用于减少横向塔架振动的用于每个叶片的桨距贡献。两个桨距信号被输入到呈桨距控制器形式的致动器控制器单元22中,该致动器控制器单元22将信号组合成致动器控制信号26以输入到每个叶片的实际变桨致动器23中。
41.mpc例程和非优化控制例程基于各种输入27
‑
29(诸如涡轮机状态输入、传感器输入、致动器输入)。取决于具体实施方式,该输入可以是专用于mpc的输入27、专用于非优化控制例程的输入28或共享输入29。
42.图3进一步示出了图2的实施例的元件,该元件包括确定变桨致动器控制信号中涉及的信号。
43.图3示出了mpc控制器20,其重复计算预测运行轨迹31(有时也称为预测时域,prediction horizon)。mpc例程是滚动时域(receding horizon)控制例程,它优化当前时隙k,同时考虑到未来时隙(这里示出为包括k+n步长的预测时域32)。这是通过优化有限时域、使用当前时隙30作为控制值24,然后再次重复优化来实现的。运行轨迹包括至少一个变量(这里是集体桨距设定点)的时间序列,并且包括被当作当前预测控制值的预测控制值24、30。这在图3中示出,其中对于每个当前优化和产生的预测轨迹,当前预测值30被当作用于集体桨距的致动器设定点24,其被示出为时隙k
‑
3至k的致动器设定点。
44.横向塔架振动单元21接收代表横向塔架振动的信号作为输入。这可以例如是表示风力涡轮机的塔架顶部的横向速度的信号,并且作为输出25是用于每个叶片的桨距修正信号。该桨距修正信号将生成导致横向塔架顶部移动被抑制的力。该控制器单元是非优化控制器单元,因为输出值不是优化的结果。取而代之,输出值基于输入传感器信号计算。该信号可能被数据处理(包括增益调节),以生成控制信号。
45.由mpc确定的集体桨距信号和由横向塔架振动单元确定的横向抑制信号被输入到致动器控制器单元22,该致动器控制器单元22将这两个信号组合以生成用于变桨致动器23的致动器控制信号26。
46.图3示出了单个mpc计算的控制变量,但控制系统通常会以运行变量和控制值的多个运行轨迹运行。运行轨迹和控制轨迹可以包括但不限于以下参数中的一个或多个:桨距值(包括集体桨距值和单独桨距值);转子速度;转子加速度;塔架移动;功率相关参数、扭矩相关参数和这些参数的导数;以及诸如发电功率pg、从风中提取的功率pw、风中的可用功率pav和旋转系统中的动能k等参数。
47.在一个实施例中,运行轨迹是预测的运行状态轨迹。状态是运行参数的集合(通常表示为向量)。示例风力涡轮机状态是:
48.49.包括桨距值θ、转子角速度ω和塔架顶部位置s,以及这些参数的时间导数。可以使用其他和更多参数来定义风力涡轮机状态x*。一般而言,运行轨迹包括用于计算期望疲劳负载测量结果的运行参数。
50.风力涡轮机的当前运行状态的状态值可以基于来自被布置为测量与风力涡轮机的物理状态值相关的传感器数据的传感器的测量传感器读数。此外,也可以使用估计值或计算值。在一个实施例中,该状态可以由状态计算器确定,该状态计算器例如呈负责确定当前运行状态的专用计算单元的形式(诸如观察器或卡尔曼滤波器)。
51.该轨迹可以表示为控制轨迹。示例控制轨迹可以是:
[0052][0053]
包括集体桨距参考信号和功率参考信号。可以使用其他和更多参数来定义风力涡轮机控制信号u1*。
[0054]
图3示出了多个离散时间步长的控制值的轨迹31。该图示出了当前时间k以及多个过去时间步长和多个未来时间步长32。已知值用实心圆圈标记,而预测值用空心圆圈标记。轨迹可以包括预测值(即仅空心圆圈)的时间序列。该轨迹不需要包括过去值和已知值,但在某些实施例中可以包括它们。该轨迹可以跨越几秒(诸如5
‑
10秒)的时间序列。然而,该轨迹可以更长或更短,这取决于给定的实施方式。
[0055]
模型预测控制(mpc)是多变量控制算法,其在滚动预测时域内使用优化成本函数j来计算最佳控制动作。
[0056]
优化成本函数可由下式给出:
[0057][0058]
其中r
i
是第i个变量的设定点,y
i
和u
i
是第i个轨迹变量,w
yi
是定义该变量的相对重要性的权重矩阵,w
ui
是定义与该变量的变化相关的惩罚的权重矩阵。
[0059]
在另一个实施例中,mpc可以实现为所谓的经济优化mpc或仅仅是经济mpc。在经济mpc中,优化基于以下形式的成本函数的最大值:
[0060]
最大值(功率
–
λ1疲劳
–
λ2噪声
–
λ3变桨率
–
...),其中λ1‑
λ3是可调整的。这种成本函数通常称为目标函数。
[0061]
在一个实施例中,优化问题可以通过公式中的变量的改变来解决,在公式中,桨距和扭矩被视为从功率导出的变量(例如在发电机功率、从风中提取的功率和动能得到优化的参数空间中)。这例如由t.hovgaard、s.boyd和j.在“model predictive control for wind power gradients.wind energy,18(6):991
‑
1006,2015”中公开。在这样的实施例中,mpc计算可以包括三层:预处理层、求解层和后处理层。在预处理中,诸如将桨距和发电机速度的测量值变换为对应的功率的步骤。还确定约束条件,估计涡轮机状态等。预处理的结果是以可以输入到求解器中的形式定义目标函数。在求解层中,找到目标函数的最大值。求解器是计算单元,其被布置为找到目标函数的最优值(优选地是全局最优值)。该最优值将是用功率变量表示的最优值。在后处理中,优化值被反变换为呈桨距和发电机速度形式的控制值。然后在控制中使用这些优化值。
[0062]
在一个实施例中,mpc控制器20以第一采样率运行。由于成本函数的优化涉及相当繁重的计算,采样率通常设定为可用计算资源和理想采样率之间的折衷。另一方面,非优化控制器通常不受采样率的限制,因为所涉及的计算是数字滤波器类型(诸如fft、带通滤波以及算术计算)。在一个示例中,mpc控制器的采样率为几赫兹,而非优化控制器的采样率为几十赫兹。
[0063]
在一个实施例中,致动器控制器单元22包括采样单元33,其被布置为以第一采样率接收预测的第一控制值,并以第二采样率接收第二控制值。一般而言,采样单元被布置为调节预测的第一控制值和第二控制值中的至少一个的采样率,从而以输出采样率输出致动器控制信号。在图3中,预测的第一控制值的采样率被调节为匹配第二控制值,使得变桨致动器的采样率匹配非优化控制器的采样率。在图中,采样单元33作为上采样单元进行运行,但也可以替代地作为下采样单元进行运行。根据情况,采样单元以使得它可以以不同的采样率获取信号并以选定的输出采样率输出组合信号的方式实现。输出采样率被选择为使其与相关致动器(此处为变桨致动器)的相关采样率相匹配。
[0064]
模型预测控制例程20被实施用于在线优化。因此,mpc控制器确定实时使用的控制值,例如如上所述的处于几赫兹和100赫兹之间的采样率的控制值。
[0065]
mpc基于执行多维成本函数的优化进行运行。在无法找到优化问题的有效解的情况下(或者因为有效解不存在,或者因为有效解可能需要太长时间才能找到),控制器单元可以包括故障单元,该故障单元监测mpc的优化例程,并且如果优化例程在预先确定的时间内没有提供优化的有效解,则故障单元发出故障信号。这可能例如在求解层中作为监测例程实施,该监测例程监测求解器是否在预先定义的时间内达到有效解。
[0066]
在一个实施例中,故障单元至少存储最后的有效预测时域的值,并且在有效当前值不可用的情况下,故障信号是取代预测控制值的超驰控制值,超驰控制值是最后确定的有效预测控制值,即最后的有效预测时域的值31。
[0067]
在一个实施例中,故障单元监测在未获得有效解的情况下通过的样本的数量,并且如果样本的数量大于预先定义的阈值,则故障信号为风力涡轮机的停机信号。例如,如果5个样本已通过而没有新的有效解,则涡轮机将停机。预测时域中的第一对值可能具有足够的可信度,使得涡轮机可以基于这些值运行。
[0068]
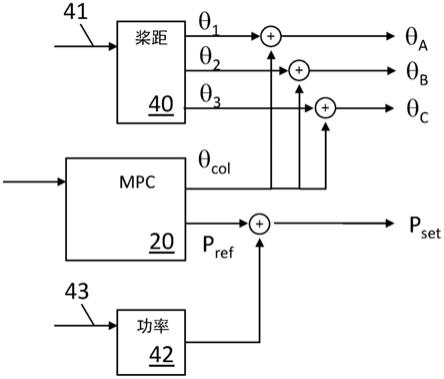
图4示出了一个实施例,其中实施mpc以输出两个预测控制值,即第一预测控制值和第二预测控制值。一个预测控制值是集体桨距θ
col
,一个预测控制值是发电机的输出功率参考p
ref
。
[0069]
图4进一步示出了两个非优化控制器。一个控制器40用于计算叠加到集体桨距上的单独的桨距贡献θ1‑
θ3。在实施例中,单独桨距贡献可以被确定为叠加到集体桨距值上以提供用于三个变桨致动器的致动器值θ
a
‑
θ
c
的周期性变化值。在实施例中,可以出于多种原因来确定单独的桨距贡献。取决于单独的桨距贡献的目标,单独的桨距控制器可以使用不同的输入信号41。
[0070]
在一个实施例中,可以确定单独的桨距贡献以减少剪切或转向。在这样的实施例中,转子平面或叶片负载传感器中的角位置可用作输入,并且基于该角位置确定单独的桨距贡献以减少剪切或转向。
[0071]
在另一个实施例中,单独的桨距贡献可以具有一般的平面外负载减小性质以减小
主轴承上的负载(通常称为倾斜偏航控制)。在这样的实施例中,叶片负载传感器或轴负载传感器可用作输入。
[0072]
在又一个实施例中,单独的桨距贡献可以具有塔架负载较小性质(诸如塔架移动的振动抑制)。对于前后移动和侧向移动,该输入可以是加速度计数据,输出是在相关方向上生成力的单独的桨距贡献。关于前后振动抑制,该输出可以是用于调制集体桨距的单个桨距调制,以提供对转子的推力调制。
[0073]
可能存在更多的或其他的单独的桨距贡献的示例。在所有情况下,控制器被实现为接受一个或多个输入41,并提供单独的桨距贡献作为输出(θ1、θ2、θ3)。单独的桨距贡献叠加到集体桨距值θ
col
上,以提供致动器控制信号(这里呈用于单独的叶片的变桨致动器的三个变桨致动器信号(θ
a
、θ
b
、θ
c
)的形式)。
[0074]
图4中还示出了第二控制器单元42,其用于计算用于修改预测功率参考(p
ref
)的控制值。
[0075]
在一个实施例中,功率控制器是用于计算用于减少侧向塔架振动的信号的控制器。在该实施例中,代表侧向塔架振动的信号(例如加速度计信号)是输入43,用于减少塔架振动的周期性功率变化被计算并被叠加到功率参考上,以提供功率设定点p
set
。功率设定点是具有与功率参考相对应的dc分量,以及用于减少侧向塔架移动的叠加功率调制的信号。
[0076]
在另一个实施例中,功率控制器是用于计算临时功率提升的控制器。在这种情况下,输入可以是请求临时过量生产的外部通信输入。在这种情况下,功率控制器计算要叠加到功率参考上的功率脉冲。
[0077]
本发明的示例实施例仅出于说明的目被描述,并且不限制如所附权利要求中限定的本发明的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1