利用准确在线模型的基于风力涡轮模型的控制和估计的制作方法
1.本发明涉及利用准确在线模型的基于风力涡轮模型的控制和估计。
背景技术:
2.风力涡轮及周围的空气动力学的模型用于估计应用和控制应用,以采集涡轮的物理行为,以用于在线运算。在一些常规估计应用中,模型可用于提供对未直接地测量的参数量值的近似。例如,即使未使用末梢偏转度传感器,基于风力涡轮模型的估计器也可提供叶片末梢偏转度。在一些常规控制应用中,风力涡轮模型可将塔架基座力矩、叶片根部力矩等的所运算的估计值作为输入而提供给控制系统,控制系统可从该输入寻找适当的命令集,以调整叶片桨距角和发电机转矩,以确保叶片根部力矩和塔架基座力矩不超过其所允许的极限。
3.风力涡轮的模型也可在离线高保真度模拟中使用,例如,如详细结构载荷解析中所要求的那样。这些模型典型地包括许多自由度,以改进瞬态行为的预测准确度。在风力涡轮模拟环境中建模的典型的涡轮自由度包括驱动系旋转、驱动系扭转、塔架沿前后方向和侧向方向的第一若干弯曲模式、塔架的第一若干扭转模式、叶片沿襟翼方向和边缘方向的第一若干弯曲模式、叶片的第一扭转模式、塔架地基平移及旋转模式以及机舱俯垂模式。
4.用于模拟的模型与用于估计或控制的模型之间的一个关键差异是,后者要求线性近似或导数的运算,线性近似或导数计算起来昂贵,而模拟模型仅需要评估方程。用于控制应用和估计应用的模型将被称为“控制模型”。
5.由于在常规工业控制平台中提供的有限的计算能力,表征模拟模型的保真度难以在实时地操作的控制模型中实现。为了在有限的计算环境中采集最重要的风力涡轮操作特征,常规的第一代控制模型使用涡轮结构动力学和空气动力学的简化模型。这些常规在线模型的典型的元素以简化的准稳态空气动力学模型为特征,该模型呈从采用许多假设(例如,仅沿前后方向和侧向方向对第一塔架弯曲模式进行建模,以及假设空气动力响应于风场的任何改变或结构位移的任何改变而瞬时地产生)的叶片元件动量(“bem”)理论获取的查找表的形式。
6.这些典型的风力涡轮在线模型可包括以下元素:诸如,例如,驱动系旋转[方程(1)
‑
(2)];塔架沿前后方向的第一弯曲模式[方程(3)
‑
(4)];塔架沿侧向方向的第一弯曲模式[方程(5)
‑
(6)];以及针对功率、转矩和推力的静态空气动力表[方程(7)
‑
(8)]。这些常规模型可具有以下形式:
[0007][0008][0009]
[0010][0011][0012][0013][0014][0015]
其中,θ是叶片桨距角,v
eff
=v
w
‑
v
fa
是在塔架顶部处的有效风速,λ=ωr/v
eff
是叶片末梢与风的速度比;t
gen
是发电机转矩控制输入;并且,n
g
是齿轮箱比。模型(1
‑
8)的优点是,其导数运算起来简单。然而,使用这种类型的控制模型的控制器可由于其不准确性而具有有限的性能。
[0016]
为了实现更高的能量产量和优异的载荷减轻能力,需要针对风力涡轮发电站的设计标准和操作标准的进展。操作进展可通过改进控制系统设计以及涡轮结构模型和空气动力模型而获取。
[0017]
本领域中缺少的是如下的控制模型:该控制模型具有比常规模型更高的保真度,以提供改进的控制系统设计以及涡轮结构建模和空气动力建模。这些更高的保真度的模型仍将需要在可在风力发电平台处得到的有限的计算能力上操作,但提供涡轮和空气动力学的严格物理表示。
技术实现要素:
[0018]
技术方案1.一种风力涡轮系统,包括:
[0019]
传感器套件,其包括定位成监测风力涡轮操作参数和环境条件的多个传感器,所述传感器套件与数据存储部通信,并且配置成将传感器动态数据提供给所述数据存储部;
[0020]
控制处理器,其与所述数据存储部通信,所述控制处理器包括处理器单元;
[0021]
控制模型,其配置成在涡轮操作点处执行线性化评估,所述线性化评估应用解析微分技术,以获取风力涡轮操作的结构构件动态行为、流体构件动态行为以及组合的结构和流体构件动态行为中的至少一个;
[0022]
所述控制模型包括在所述结构构件动态行为与所述流体构件动态行为之间的耦合,通过将广义流体力引入所述风力涡轮的结构模型中并且在所述流体构件动态行为中包括所述广义流体力对所述风力涡轮的结构状态的依赖性来实施所述耦合,所述结构模型包括相对于塔架的第一弯曲固有模式、一个或多个叶片的第一弯曲固有模式以及所述风力涡轮的驱动系的旋转中的至少一个而准确的结构特征;以及
[0023]
模块,其配置成利用所述结构构件动态行为、所述流体构件动态行为以及所述组合的结构和流体构件动态行为的所述线性化评估中的至少一个来执行运算。
[0024]
技术方案2.根据技术方案1所述的系统,其特征在于,包括:
[0025]
所述模块是配置成生成从包括涡轮状态信号估计值、涡轮性能信号估计值、流体状态信号估计值以及流体性能信号估计值的组选择的一个或多个估计值的估计模块;并
且,
[0026]
所述一个或多个估计值中的每个基于传感器动态数据、所述结构构件动态行为以及所述流体构件动态行为中的一个或多个元素。
[0027]
技术方案3.根据技术方案2所述的系统,其特征在于,所述估计模块配置成通过实施扩展卡尔曼滤波而生成所述一个或多个估计值。
[0028]
技术方案4.根据技术方案1所述的系统,其特征在于,查找表中所包括的所述流体构件动态行为的至少部分包含一个或多个转子平面流体性质及其导数的表示,所述一个或多个叶片中的至少一个横过所述转子平面。
[0029]
技术方案5.根据技术方案4所述的系统,其特征在于,所述查找表包括:
[0030]
相应的元素,其包含针对所述一个或多个叶片中的相应的一个的数据集,每个数据集包括对叶片末梢与风的速度比、桨距角、方位角以及代表性的动态压力参数中的一个或多个中的至少一个的依赖性;并且,
[0031]
其中,所述数据集可应用于确定叶片力和叶片扭曲中的至少一个。
[0032]
技术方案6.根据技术方案2所述的系统,其特征在于,互连的结构构件动态行为模型和所述流体构件动态行为模型利用风扰动动态行为模型扩充,以估计风参数,所述风参数包括平均风速、失准度、切变、转向度、调和变化以及表示为风的调和变化的每一叶片的有效风速中的一个或多个。
[0033]
技术方案7.根据技术方案1所述的系统,其特征在于,所述结构模型包括由流体力、惯性力以及质量叶片力中的一个或多个造成的叶片扭曲效应。
[0034]
技术方案8.根据技术方案1所述的系统,其特征在于,包括:
[0035]
所述模块是配置成基于一个或多个控制状态而确定致动器命令的多变量控制模块;并且,
[0036]
所述致动器命令包括用以大约实时地将所述风力涡轮的操作维持于预确定的设置的风力涡轮命令。
[0037]
技术方案9.根据技术方案8所述的系统,其特征在于,所述多变量控制模块包括模型预测控制器。
[0038]
技术方案10.根据技术方案1所述的系统,其特征在于,所述控制模型配置成通过实施算法微分或符号微分中的一个而执行所述线性化评估。
[0039]
技术方案11.根据技术方案1所述的系统,其特征在于,所述流体构件动态行为包括:
[0040]
施加到叶片节段的局部力的贡献率,其基于被扩充以应用针对三维效应的校正的翼型件的局部空气动力性质;和
[0041]
来自风力涡轮操作的动态尾流效应。
[0042]
技术方案12.根据技术方案1所述的系统,其特征在于,所述流体构件动态行为包括在转子面的上游的风传播模型和在转子面的下游的风传播模型中的至少一个以及来自远程风测量系统传感器的数据。
[0043]
技术方案13.根据技术方案1所述的系统,其特征在于,所述控制模型配置成通过多主体动态建模技术来获取所述结构构件动态行为的解析表示。
[0044]
技术方案14.根据技术方案1所述的系统,其特征在于,所述控制模型配置成通过
实施叶片元件动量(bem)模型来获取所述流体构件动态行为,所述bem模型包含转子平面的一个或多个流体性质的表示,所述一个或多个叶片中的至少一个横过所述转子平面。
[0045]
技术方案15.根据技术方案1所述的系统,其特征在于,所述控制模型配置成:
[0046]
使用代理模型来近似针对所述结构构件动态行为和所述流体构件动态行为中的至少一个的相应的函数;并且,
[0047]
从所述相应的代理函数构建相应的解析导数。
[0048]
技术方案16.一种计算风力涡轮估计操作参数和控制命令中的至少一个的方法,所述方法包括:
[0049]
传感器套件监测风力涡轮操作参数和环境条件,以将传感器动态数据获取到数据存储部;
[0050]
在涡轮操作点处执行线性化评估,所述线性化评估应用解析微分技术,以获取风力涡轮操作的结构构件动态行为、流体构件动态行为以及组合的结构和流体构件动态行为中的至少一个;
[0051]
通过将广义流体力引入所述风力涡轮的结构模型中并且在所述流体构件动态行为中包括所述广义流体力对所述风力涡轮的结构状态的依赖性来实施所述结构构件动态行为与所述流体构件动态行为之间的耦合,所述结构模型包括相对于塔架的第一弯曲固有模式、一个或多个叶片的第一弯曲固有模式以及所述风力涡轮的驱动系的旋转中的至少一个而准确的结构特征;以及
[0052]
估计模块和多变量控制模块中的至少一个利用所述结构构件动态行为、所述流体构件动态行为以及所述组合的结构和流体构件动态行为的所述线性化评估中的至少一个来执行运算。
[0053]
技术方案17.根据技术方案16所述的方法,其特征在于,包括:
[0054]
所述估计模块生成从包括涡轮状态信号估计值、涡轮性能信号估计值、流体状态信号估计值以及流体性能信号估计值的组选择的一个或多个估计值;和
[0055]
使所述一个或多个估计值中的每个基于传感器动态数据、所述结构构件动态行为以及所述流体构件动态行为中的一个或多个元素。
[0056]
技术方案18.根据技术方案16所述的方法,其特征在于,包括:
[0057]
所述多变量控制模块基于一个或多个控制状态而确定致动器命令;和
[0058]
所述致动器命令包括用以大约实时地将所述风力涡轮的操作维持于预确定的设置的风力涡轮命令。
[0059]
技术方案19.根据技术方案16所述的方法,其特征在于,包括利用风扰动动态行为模型来扩充互连的结构构件动态行为模型和所述流体构件动态行为模型,以估计风参数,所述风参数包括平均风速、失准度、切变、转向度、调和变化以及表示为风的调和变化的每一叶片的有效风速中的一个或多个。
[0060]
技术方案20.根据技术方案16所述的方法,其特征在于,所述结构模型包含表示由流体力、惯性力以及质量叶片力中的一个或多个造成的叶片扭曲效应的分量。
[0061]
技术方案21.根据技术方案16所述的方法,其特征在于,包括通过实施算法微分或符号微分中的一个来执行所述线性化评估。
[0062]
技术方案22.根据技术方案16所述的方法,其特征在于,包括对所述流体构件动态
行为进行建模以考虑到:
[0063]
施加到叶片节段的局部力的贡献率,其基于被扩充以应用针对三维效应的校正的翼型件的局部空气动力性质;和
[0064]
来自风力涡轮操作的动态尾流效应。
[0065]
技术方案23.根据技术方案16所述的方法,其特征在于,所述流体构件动态行为包括在转子面的上游的风传播模型和在转子面的下游的风传播模型中的至少一个以及来自远程风测量系统传感器的数据。
[0066]
技术方案24.根据技术方案16所述的方法,其特征在于,包括通过实施多主体动态建模技术来获取所述结构构件动态行为的解析表示。
[0067]
技术方案25.根据技术方案16所述的方法,其特征在于,包括实施叶片元件动量(bem)模型,以获取所述流体构件动态行为的至少部分,所述bem模型包含转子平面的一个或多个流体性质的表示,所述一个或多个叶片中的至少一个横过所述转子平面。
[0068]
技术方案26.根据技术方案16所述的方法,其特征在于,包括:
[0069]
使用神经网络来近似针对所述结构构件动态行为和所述流体构件动态行为中的至少一个的相应的代理函数;和
[0070]
从所述相应的代理函数构建相应的解析导数。
[0071]
技术方案27.根据技术方案16所述的方法,其特征在于,在查找表中包括所述流体构件动态行为的至少部分,所述查找表包含一个或多个转子平面流体性质及其导数的表示,所述一个或多个叶片中的至少一个横过所述转子平面。
附图说明
[0072]
图1示意性地描绘了根据实施例的气动弹性模型结构;
[0073]
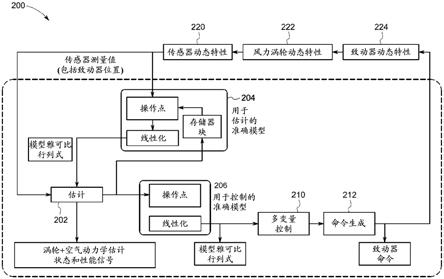
图2描绘了根据实施例的用于计算针对风力涡轮的动态操作的控制信号的过程;以及
[0074]
图3描绘了根据实施例的用于计算针对风力涡轮的动态操作的控制信号的系统。
具体实施方式
[0075]
实施性(embodying)的系统及方法提供了一种风力涡轮高保真度控制模型,该模型当在可在风力发电平台处得到的有限的计算能力上操作时,提供涡轮结构动力学和空气动力学的严格物理表示。
[0076]
先前的改进常规建模的尝试被起源于简化假设集的建模误差阻碍,简化假设包括但不限于:仅仅使用第一弯曲模式来表示塔架弯曲;忽略塔架扭转;忽略叶片柔性;将确定性的风仅表示为平均风速;忽略动态尾流效应;以及假设刚性塔架地基。
[0077]
用于估计和控制的准确风力涡轮气动弹性模型
[0078]
实施性的建模技术包括一种与常规模型不同的方法,该方法用以实施更严格的机械方程以表示在多个主体之间的动态相互作用,该机械方程包括叶片、塔架以及主轴的柔性表示。实施性的模型还可包括准确的空气动力方程,该准确的空气动力方程包括诱导速度的表示和流体/结构相互作用的表示。
[0079]
提供针对这些机械方程和空气动力方程的这些解的实施性的算法当在可在风力
涡轮平台处得到的有限的计算能力上执行时,可实时地(即,在风力涡轮的操作控制期间)产生严格并且准确的结果。
[0080]
图1示意性地描绘了根据实施例的气动弹性模型结构100。为了管理总体气动弹性模型100的复杂度,便利的是,将总体气动弹性模型100划分成结构构件模型110和空气动力(流体)构件模型120。结构构件110解决刚性主体和柔性主体的动力学问题;并且,流体构件120解决与空气动力(以及针对离岸风应用的流体动力)相关联的行为。以下讨论仅涉及位于结构构件模型与空气动力构件模型之间的界面处的空气动力流体力。然而,本领域普通技术人员可容易将针对离岸风应用的流体动力并入。
[0081]
结构模型
[0082]
常规风力涡轮结构模型在解析上被公式化为具有柔性构件的多主体系统,该多主体系统可在数学上通过拉格朗日(lagrange)方法、达朗贝尔(d’alembert)方法或牛顿
‑
欧拉(newton
‑
euler)方法而表达。将该常规方法应用于风力涡轮系统的拉格朗日公式,拉格朗日函数l计算为动能(t
涡轮
)与势能(v
涡轮
)之间的差:
[0083]
l=t
涡轮
‑
v
涡轮
[0084]
其中,动能和势能计算为每个构件的贡献的总和。这在数学上表达为:
[0085]
t
涡轮
=t
地基
+t
塔架
+t
机舱
+t
驱动系
+t
叶片
[0086]
v
涡轮
=v
地基
+v
塔架
+v
机舱
+v
驱动系
+v
叶片
[0087]
然后,风力涡轮运动结构方程可从标准拉格朗日公式获取:
[0088][0089]
其中,q是系统的广义坐标,q是广义力,并且,记号指示相对于变量v的偏导数,并且,指示相对于时间的导数。标准数学操纵应用于(9)上,以获取如下的形式的结构方程:
[0090][0091][0092]
其中,u是控制输入(例如,叶片桨距角、发电机转矩);m是质量矩阵;并且,向量h表示来自不同源的广义力(h=h
惯性
+h
重力
+h
空气动力
+h
施加
),所述广义力包括惯性力、重力、空气动力以及如主轴处的电转矩和叶片变桨马达处的转矩那样的所施加的力。
[0093]
向量y
s
包含来自结构模型的对控制应用或估计应用有用的输出。例如,对于估计应用,y
s
包括模拟的传感器测量值;对于控制应用,y
s
典型地包括可用于评估反馈动作(例如,推力、塔架力矩和叶片力矩)的信号。坐标及其导数的级联一般作为结构系统的状态向量而采用。
[0094]
这些常规公式可用于获取用于系统和/或控制器设计的模拟环境或获取载荷认证。然而,这些常规模拟模型不可有效地实施成实时地操作。
[0095]
实施性的系统及方法利用所描述的系统性方法来获取针对风力涡轮系统的运动
方程,以进一步推进模型限定,以包括如下的能力:在解析上生成模型雅可比行列式,以在在线实时过程(即,在风力涡轮的操作控制期间)中实现实施方式。
[0096]
空气动力模型
[0097]
可从叶片元件动量(bem)模型获取空气动力,以评估围绕风力涡轮的诱导速度场和在每个叶片处的局部空气动力。叶片被划分成有限数量的元件,并且,然后,基于局部风速度、叶片元件的局部位移和速度以及翼型件特性而在每个元件处计算升力、阻力以及空气动力力矩。
[0098]
为了具有更准确的物理表示,bem方程可被修改以考虑叶片末梢损耗和叶片根部损耗的效应(例如通过使用普朗特
‑
格劳特(prandtl
‑
glauert)校正因子)。
[0099]
bem模型可与借助于诱导速度来描述入流风场的动力学的尾流模型组合。动态入流模型可用于采集诱导速度的时间常数,以适于新操作状况。如果动态尾流效应被忽略,例如使用静态或稳态尾流模型(其中,可假设诱导速度实现与空气动力的瞬时平衡),则基于对应的模型的控制器可具有流体
‑
结构相互作用的不适当的表示,并且有可能导致不稳定性。使如bem那样的模型与动态尾流模型组合的完整的空气动力模型可写成如下的形式:
[0100][0101]
h
空气动力
=g(x
a
,z
a
,x
s
,w
p
)
ꢀꢀꢀ
(13)
[0102]
0=g
代数
(x
a
,z
a
,x
s
,w
p
)
ꢀꢀꢀ
(14)
[0103]
其中,x
a
是可包含诱导轴向速度和诱导切向速度的空气动力状态向量;z
a
是空气动力代数方程的向量;w
p
是确定性的风参数的向量,风参数有可能包括平均风速、失准度、切变、转向度以及围绕方位角的调和变化;x
s
是结构构件的状态;h
空气动力
表示针对叶片(典型地,3个叶片)的广义空气动力和力矩;并且,函数g
代数
表示空气动力量值的显式代数约束。备选形式可在不存在使得这些形式在函数f和g内隐式地限定的代数约束的情况下表示。公式一般作为计算机程序而出现,而不是作为闭式表达式(12
‑
14)的集合而出现。
[0104]
空气动力模型与结构模型之间的耦合通过作为对空气动力模型的输入的结构状态x
s
和作为对结构模型的输入的广义空气动力h
空气动力
而实施。
[0105]
如果风力涡轮使用远程风传感器(例如,激光雷达、声雷达、雷达)来测量上游风速分量或下游风速分量,则空气动力模型可包括对风的扩展表示,以在涡轮前面和/或在涡轮后面(不仅仅在转子面处)采集入流速度和尾流速度。为了获取用于估计应用的一致的空气动力模型,一些实施例限定三维网格,该三维网格包括转子面和远程风测量位置,并且将(12
‑
14)中的空气动力模型扩充成包括作为空气动力状态x
a
的部分的在这些点处的风速度并且包括作为动态方程(12)的部分的沿着平均风速方向的风速度的传播。
[0106]
在风力涡轮操作期间,叶片上的空气动力、重力以及惯性力引起叶片的柔性扭转,叶片的柔性扭转倾向于降低空气动力性能和结构载荷。叶片扭转或柔性扭曲的效应典型地通过以下方式而建模:在动态方程中包括叶片扭转自由度,或采用准静态方法并且计算将在每一个时刻与叶片力处于平衡的叶片区段的稳态变形。由于将扭转自由度添加到动态方程中使得模型在计算上昂贵,并且由于扭转自由度典型地具有落在控制带宽之外的固有频率的事实,因而一般便利的是,采用准静态建模方法。在此情况下,基于叶片力和叶片刚度而进行的对准静态叶片扭曲的运算可通过以下方式而添加到方程(12
‑
14):包括作为代数变量z
a
的部分的叶片扭曲变形,并且包括作为方程(14)的部分的准静态扭转平衡方程。
[0107]
空气动力还取决于风参数w
p
。大体上,这些参数未通过在风力涡轮系统中使用的标准产生传感器而准确地测量。因此,对于在线实时(即,在风力涡轮的操作控制期间)估计和控制应用,这些参数通过利用如下的形式的风扰动模型扩充互连的风力涡轮结构模型(9
‑
10)和空气动力模型(12
‑
14)而估计:
[0108][0109]
w
p
=g
w
(x
w
)
ꢀꢀꢀꢀꢀ
(16)
[0110]
其中,x
w
是风状态向量,w
w
是白噪声随机过程,并且,f
w
和g
w
是非线性函数。在实施性的系统中,风参数w
p
可包括平均风速、失准度、切变、转向度以及围绕方位角的调和变化。在其它实施性的系统中,风参数w
p
可包括针对每一叶片的有效风速,其中,风状态x
w
表示围绕方位角的风的调和变化(即,1p、2p、3p等,其中,xp指代转子旋转频率的倍数)。
[0111]
模型导数
[0112]
高级的控制算法和估计算法的应用典型地要求受控制的系统的依据雅可比行列式而给出的数学模型或方程相对于其输入的偏导数。风力涡轮的结构方程、空气动力方程两者和在结构方程与空气动力方程之间的互连是如下的形式的微分
‑
代数方程:
[0113][0114]
0=h(x,z,u)
ꢀꢀꢀ
(18)
[0115]
y=g(x,z,u)
ꢀꢀꢀ
(19)
[0116]
其中,x是状态向量;
[0117]
z是代数变量的向量;以及
[0118]
y是输出向量。围绕操作点(x
*
,z
*
,u
*
)的近似线性化表示具有如下的形式:
[0119][0120][0121][0122]
其中,雅可比矩阵是函数f、g以及h沿向量x、z以及u的方向的梯度。为了使记号简化,通过假设不存在代数约束,可使用以下限定:
[0123][0124][0125]
f=f
x
(x
*
,z
*
,u
*
)
‑
ax
*
‑
bu
*
ꢀꢀꢀꢀꢀꢀ
(22)
[0126][0127][0128]
g=g
x
(x
*
,z
*
,u
*
)
‑
cx
*
‑
du
*
ꢀꢀꢀꢀꢀꢀ
(25)
[0129]
为了达到围绕(x
*
,z
*
,u
*
)的近似局部模型的简化形式:
[0130][0131]
y=cx+du+g
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(27)
[0132]
控制模型数据a、b、c、d、f、g随操作点而变化,并且需要在控制操作期间定期地评估。
[0133]
当所考虑的系统是高度地非线性的并且操作空间在变量x、z、u的域中跨越宽的范围时,需要在每一个时步评估雅可比行列式,并且,计算快速雅可比行列式的能力对于实现高级控制应用来说可变得关键。对于风力发电系统来说是这种情况,其中,瞬态操作可受到强烈的风变化,以柔性结构和非线性运动学为特征,因而要求正则模型数据再运算。
[0134]
估计算法和控制算法的在线实施方式有时表达为线性化模型方程的离散时间表示的函数。因此,可代替(方程26
‑
27)而采用使用雅可比行列式的离散时间版本的离散时间当量。出于以下讨论的目的,以下公式未在连续时间线性化或离散时间线性化之间进行区分。
[0135]
在基于来自单个时步的数据的应用中,控制模型206的线性化模块产生雅可比矩阵a、b、c、d的集合以及相关联的线性化误差f和g。对于诸如mhe和mpc之类的应用,线性化模块产生与预指定的时间范围内的每步对应的雅可比矩阵的序列。
[0136]
由a、b、c、d、f、g表示的模型数据随操作点而变化。实施性的系统及方法可在控制操作期间定期地(例如,以预确定、周期性或指定的时间间隔)评估这些模型元素。当所考虑的系统是高度地非线性的并且操作空间在变量x、z、u的域中跨越宽的范围时,实施例可在大约每一个时步评估雅可比行列式,并且,计算快速雅可比行列式的能力对于实现高级控制应用来说可变得关键。对于风力发电系统来说是这种情况,其中,受到强烈的风变化并且以柔性结构和非线性运动学为特征的瞬态操作要求正则模型数据再运算。
[0137]
计算模型导数
[0138]
通过数值微分而获取的导数
[0139]
用以获取函数导数的常规方法包括数值微分和精确微分。数值微分技术借助于数值有限差分方案来对导数进行近似。例如,对于模型(方程10),数值导数典型地通过如下的形式的中心差分运算而获取:
[0140][0141][0142][0143]
其中,δ是摄动大小;并且,e
j
是第j个典范向量。
[0144]
由于由舍入误差、病态性以及数值不稳定性引起的计算量和数值不准确性,该常规方法对于实时控制/优化应用来说很少在线有效。改为使用其它方法,如在以下段落中描述的那样。
[0145]
通过解析微分而获取的精确导数
[0146]
备选的常规方法包含使用人工求导、算法微分或符号微分来对导数进行的精确或解析微分运算。人工地评估导数一般非常繁琐并且易于出错,仅当底层系统模型非常简单时才适用。
[0147]
算法微分是如下的过程:通过该过程而处理用以评估函数的数学程序,以创建用以计算原函数的导数的另一程序。存在可通过以下方式而自动地(无用户介入)执行该评估过程的常规工具:使原算法转换成图形表示,通过系统性地应用针对微分的链式法则而在符号上操纵函数的图形以生成针对微分的图形,并且最终获取用以评估对应的导数的新算法。
[0148]
符号微分依赖于计算机代数系统,该系统在代数表达式上操作,以产生相关联的代数表达式的集合,以评估原表达式的导数。用于实施符号微分的工具典型地包括用以使代数表达式简化的成批的技术并且可使所得到的表达式转换成码。符号微分虽然对处置闭式表达式有效,但不可容易地处置包含算法控制流特征(例如,“for”循环或“while”循环和“if
‑
then”分支)的函数。
[0149]
符号微分和算法微分两者产生“精确”导数,不同于数值微分方法,该“精确”导数不受舍入问题和截断问题的影响。用以获取解析导数的方法的选择取决于进行微分的原方程/程序。符号工具往往有益于使代数表达式简化,而算法工具可产生有效码并且有效地处理逻辑分支和控制循环。
[0150]
在一些风力发电平台中,处理器的计算处理能力不足以实现精确导数的实时实施方式。根据实施例,在这些平台上,近似导数可实施为查找表。在该方法中,在输入空间的网格中评估导数,并且,通过插值方法而对导数进行近似。导数的运算离线地执行,并且,在线计算执行插值。根据实施例,在精确导数方法过度地复杂的情况下,离线计算与在线计算之间的该分离允许在离线评估中使用数值微分。包括前向差分、后向差分以及中心差分的若干数值微分方案可用于对系统导数进行近似。
[0151]
通过代理模型而获取的近似导数
[0152]
在解析微分产生不适合于在目标控制平台中实施的高复杂度函数或表达式的情况下,便利的是,利用代理函数来对原函数进行近似,对于该代理函数,解析微分更简单。该近似可通过以下方式而执行:使用神经网络(nn)来获取原函数的代理模型并且利用该模型来容易地构建解析导数。在一些实施方式中,神经网络可使用sigmoid激活函数。
[0153]
例如,如果利用单个隐层来通过以下前馈神经网络而对将大小n的向量映射成实数集的函数f(x)进行近似:
[0154][0155]
其中(其中,对于从1至m的所有“k”,w
[1]
是具有n行和m列的矩阵,w
[2]
和b
[1]
是大小m的向量,则可通过以下表达式而对“f(x)”的导数进行近似:
[0156][0157]
其中,对于从1至m的所有“k”,并且,σ
′
(z
k
)=σ(z
k
)(1
‑
σ(z
k
))。f的近似雅可比行列式的评估仅仅涉及三个向量矩阵乘法运算和x处的对sigmoid函数的评估。如果函数f复杂并且隐层中的神经元的数量是中等的,则这种类型的近似的计算成本可非常便利。
[0158]
用于风力涡轮的平台计算环境
[0159]
实施性的系统及方法的实施方式可取决于可从平台的控制处理器环境得到的计算能力并且取决于该应用的所要求的准确度而变化。每个实施例可提供预测数据,该预测数据用于由控制处理器在评估对于在当前操作参数和条件下进行的对风力涡轮的实时操作控制来说需要的命令中使用。
[0160]
实施性的模型可对来自风力涡轮的传感器数据进行分解,以获取空气动力状态x
a
,空气动力状态x
a
包括在每个叶片区段和每个叶片处的轴向诱导速度和切向诱导速度。结构状态x
s
包括叶片襟翼方向的位移和边缘方向的位移的表示。输出力向量h
a
包括从每个叶片施加到毂的力和力矩。
[0161]
风参数w
p
是靠近风力涡轮转子的风场的表示。风参数w
p
包括表征风的时间可变性/空间可变性的风分量,例如,平均风速、风切变、风向以及涡流结构。
[0162]
耦合气动弹性模型的导数运算可通过在耦合形式(17)
‑
(19)上操作而进行,或通过单独地评估结构模型和空气动力模型的导数并且然后使应用线性系统的标准操纵的耦合导数集成而进行。
[0163]
如例如由方程(9)
‑
(10)表示的结构风力涡轮模型的导数的在线计算使用精确导数(使用算法微分或符号微分)来最便利地进行。以下章节主要集中于空气动力模型的导数的运算。
[0164]
低cpu能力平台
[0165]
对于极其有限的cpu能力,实施性的模型的空气动力表示可为经由表插值来实现的准静态实施方式,其中,在针对所选取的参考结构状态的操作参数的网格中,对广义操作力进行列表。根据实施例,通过寻找稳态解而获取针对该低cpu能力的公式,即,对于所选取的参考结构状态可针对空气动力状态x
a
和代数变量z
a
而寻找稳态值。每一叶片的所得到的力可作为参数的最小集合的函数而列表,以获取如下的形式的表示:
[0166][0167]
其中,是第i个叶片末梢与风的速度比;v
i
是针对第i个叶片的有效风速;
θ
i
是第i个叶片桨距角;并且,是第i个叶片的方位角。
[0168]
根据实施例,离线过程可执行用以评估在每个网格点处的空气动力h
a
及其(数值)导数(其对于多种操作参数λ、θ、来说由i、j、k指代)两者的计算程序:
[0169][0170][0171][0172][0173]
通过(29a
‑
d)而获取的数据可用于构建针对如下的形式的导数的列表的表示:
[0174][0175][0176][0177][0178]
如果将考虑叶片扭曲效应,则叶片末梢与风的速度比、方位角以及桨距角不足以唯一地表征叶片扭曲,在此情况下,需要扩充表(28,29a
‑
d),以更精确地表征空气动力操作点。出于此原因,空气动力表可被扩充成包括针对叶片i的动态压力参数:或可用于唯一地表征空气动力操作点、空气动力以及因此准静态叶片扭曲的任何其它参数。
[0179]
高cpu能力
[0180]
对于平台可提供更高的准确度的控制模型的高cpu能力,具体尾流动力学的bem模型的公式可以以不同方式实施。根据实施例,空气动力状态x
a
可包括风轴向诱导速度和风切向诱导速度。代数变量可包括例如末梢损耗因子。针对实施性的方法的风参数可包括平均风速、竖直切变系数和水平切变系数、竖直失准角和水平失准角以及取决于转子方位角的调和风变化。这些控制模型的导数通过将自动微分或符号微分应用于方程(12,13,14,15,16)而获取。
[0181]
中等cpu能力
[0182]
对于中等cpu能力,可使用不同策略来实施不同简化。例如,根据实施例,策略可包
括使用准稳态诱导速度、减少用以表示局部空气动力的区段的数量、减少风参数的数量以及使计算程序与查找表组合。可利用代理模型来对空气动力模型进行近似,以用于高保真度模型和/或静态近似。近似实时空气动力模型可针对空气动力向量分量h
空气动力
的每次输入而利用神经网络来获取。
[0183]
将神经网络映射到每个力向量分量的该过程可通过以下方式而进行:限定(一个或多个)隐层中的神经元的数量,评估当前实时模型以针对输入空间的给定的覆盖率而计算空气动力,并且然后通过经由反向传播算法来限定权重的最优值而训练神经网络。
[0184]
图2描绘了根据实施例的用于估计针对风力涡轮的动态操作的控制信号的过程200。估计模块202从估计模型204接收数据。多变量控制模块210从控制模型206接收数据,控制模型206可为第一模型的另一实例。在一些实施方式中,模型的同一实例可用于估计和控制建模。
[0185]
模型执行被分类为操作点运算和线性化运算的在线运算。估计模型204从监测风力涡轮的传感器套件接收所监测的传感器数据。该传感器数据可包括传感器动态数据220、风力涡轮动态数据222以及致动器动态数据224。传感器数据可以以预确定的间隔更新,使得所生成的控制命令响应于所监测的传感器数据的改变。存储于存储器块中的先前的估计结果可用作进入操作点运算中的反馈。
[0186]
通过在模型中应用所监测的数据,操作点可由盛行风速以及可包括失准度和切变的其它风参数和环境参数限定。操作点还可由风力涡轮的结构条件限定,所述结构条件包括针对每个叶片的参考叶片桨距、柔性构件中的参考结构变形以及方位旋转角和速率。该操作点用作针对线性化的起点。线性化模块针对结构构件和空气动力构件而评估雅可比行列式,并且然后使这些雅可比行列式组合成针对整个模型的雅可比行列式的统一集。
[0187]
估计模块接收来自估计模型的线性化模型雅可比行列式和提供给估计模型的所监测的传感器数据。估计模块生成涡轮和空气动力估计状态和性能信号。这些信号被提供给存储器块,以用于由估计模型204访问。涡轮和空气动力估计状态和性能信号还由估计模块提供给控制模型206。
[0188]
控制模型206可通过将估计应用和/或控制应用实时地(即,大约在这些操作点对风力涡轮的操作造成影响的时间)应用于由估计模块生成的所估计的状态信号和性能信号来获取涡轮操作点和空气动力操作点的估计值。
[0189]
估计应用和控制应用可被分类成使用单个时步或多个时步的应用。前组可包括估计应用,诸如卡尔曼(kalman)滤波和扩展卡尔曼滤波(ekf);并且可包括控制应用,诸如线性二次型调节器(lqr)、线性二次型高斯(gaussian)(lqg)、作为线性矩阵不等式(lmi)问题的解决方案而获取的取决于状态的里卡蒂(riccati)方程和控制器。后组可包括滚动时域估计(mhe)应用和模型预测控制(mpc)应用。
[0190]
来自控制模块206的对涡轮操作点和空气动力操作点的实时估计值被提供给多变量控制模块210。多变量控制模块基于涡轮操作点和空气动力操作点以及如由传感器监测的实时操作参数而生成控制条件。控制条件被提供给命令生成模块212,命令生成模块212生成指导控制处理器控制风力涡轮操作的致动器命令。风力涡轮操作参数和条件被监测,并且在循环中被提供回到估计模块202和估计模型204。监测可以以预确定的间隔执行或大约持续地(处于传感器套件的响应速率和采样速率内)执行。
[0191]
图3描绘了根据实施例的用于估计针对风力涡轮的动态操作的控制信号的系统300。系统300可包括与数据存储部320通信的控制处理器312。控制处理器可与数据存储部直接通信,或跨过电子通信网络(未示出)而间接通信。处理器单元314可执行可执行指令322,可执行指令322引起处理器执行用于估计控制信号的过程。存储器单元316可为控制处理器提供本地高速缓存存储器。数据存储部320可包括估计模型204、控制模型206、传感器动态数据220、风力涡轮动态数据222以及致动器动态数据224。传感器套件330可包括相对于风力涡轮340定位于用以获取相应的动态数据的位置处的传感器。
[0192]
根据一些实施例,存储于非易失性存储器或计算机可读介质(例如,寄存器存储器、处理器高速缓存、ram、rom、硬盘驱动器、闪速存储器、cd rom、磁介质等)中的计算机程序应用可包括代码或可执行程序指令,所述代码或可执行程序指令在被执行时可指导和/或引起控制器或处理器执行本文中所讨论的方法,诸如,估计针对风力涡轮的动态操作的控制信号的方法,如上文中所公开的那样。
[0193]
计算机可读介质可为非暂时性计算机可读介质,其包括所有形式和类型的存储器以及所有计算机可读介质(除了暂时性传播信号以外)。在一个实施方式中,非易失性存储器或计算机可读介质可为外部存储器。
[0194]
尽管在本文中已描述具体的硬件和方法,但注意到,可根据本发明的实施例而提供任何数量的其它构造。因而,虽然已示出、描述且指出本发明的基本新颖特征,但将理解,在不脱离本发明的精神和范围的情况下,可由本领域技术人员作出所图示的实施例的形式和细节及其操作的多种省略、置换以及改变。还充分地预期且设想到元件从一个实施例至另一个实施例的置换。本发明仅仅关于所附权利要求书及其中的叙述的等同体而限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1