一种风电机组湍流翘尾的主动切出控制方法及系统与流程
1.本发明主要涉及风电技术领域,具体涉及一种风电机组湍流翘尾的主动切出控制方法及系统。
背景技术:
2.在风电场开发项目中,机型及机位点的选取通常遵循风电机组的设计标准,但在实际项目开发过程中,因可选机位不足或其他限制条件(如生态红线、居民噪音、压矿等)导致需要进行机位变更,而变更后的机位往往会出现实际风资源条件剧烈变化,特别是大风下的湍流强度出现翘尾现象,导致机组关键结构及部件的载荷(如静止轮毂、旋转轮毂等)超出限制,影响机组安全性以及风场的开发建设情况。目前通常的解决方案有:1)提前切出;2)升级机型(选用结构加强型机型);3)减小机位点的布置开发。但是上述各方案的缺陷十分明显,影响风电场发电量或/和增加风电场开发成本。
技术实现要素:
3.本发明要解决的技术问题就在于:针对现有技术存在的问题,本发明提供一种安全高效、易实现的风电机组湍流翘尾的主动切出控制方法及系统。
4.为解决上述技术问题,本发明提出的技术方案为:
5.一种风电机组湍流翘尾的主动切出控制方法,包括步骤:
6.1)在风电机组运行过程中,获取风电机组的湍流信息和风速信息;
7.2)将湍流信息和风速信息分别与对应的预设阈值进行对比;当湍流信息和风速信息均大于对应的预设阈值时,则判断湍流翘尾,进入湍流翘尾主动切出控制。
8.作为上述技术方案的进一步改进:
9.在步骤2)中,湍流翘尾主动切出控制包括对机组的转矩指令和桨距指令;转矩指令按斜率下降或按转速转矩进行插值;桨距指令为固定速率或按桨距角和变桨速率进行插值。
10.在步骤2)之后,还包括湍流翘尾主动切出控制退出方法:
11.在转矩和桨距指令执行到位后,再次结合机组湍流信息以及风速信息进行判断;当机组湍流条件以及风速条件满足复位启机后,机组复位启机,执行正常启机发电过程,否则机组继续停机等待。
12.指令执行到位是指:通过对桨距和转矩的开环设计,令转矩指令按时间斜率下降至零或按发电机转速插值,同时等待桨距指令执行到位。
13.在步骤2)中,湍流信息对应的预设阈值为+2m/s,湍流信息对应的预设阈值为1.5倍设计湍流值;在300s滑窗滤波的平均风速值大于额定风速+2m/s,且3s滑窗滤波的估算湍流值大于风场设计湍流的1.5倍,则判断湍流翘尾。
14.本发明还公开了一种风电机组湍流翘尾的主动切出控制系统,包括:
15.第一模块,用于在风电机组运行过程中,获取风电机组的湍流信息和风速信息;
16.第二模块,用于将湍流信息和风速信息分别与对应的预设阈值进行对比;当湍流信息和风速信息均大于对应的预设阈值时,则判断湍流翘尾,进入湍流翘尾主动切出控制。
17.本发明进一步公开了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序在被处理器运行时执行如上所述的风电机组湍流翘尾的主动切出控制方法的步骤。
18.本发明还公开了一种计算机设备,包括存储器和处理器,所述存储器上存储有计算机程序,所述计算机程序在被处理器运行时执行如上所述的风电机组湍流翘尾的主动切出控制方法的步骤。
19.与现有技术相比,本发明的优点在于:
20.本发明在湍流信息和风速信息均大于对应的预设阈值时,判断湍流翘尾,进入湍流翘尾主动切出控制,保证了湍流翘尾下风电场开发建设和延续性以及机组的安全性;方法整体安全高效且易实现,在不增加硬件成本的基础上安全解决湍流翘尾问题,通用性强;其中采用机组的湍流信息和风速信息进行组合判断,保证了安全性和准确性,同时减小了误动作。
21.本发明通过对转矩指令和桨距指令进行多样性的特性调节,保证了风机安全。本发明还包括对湍流翘尾主动切出控制退出,能够及时响应机组当前环境信息,合理调节启停机动作,有效的减小发电性能的损失。
附图说明
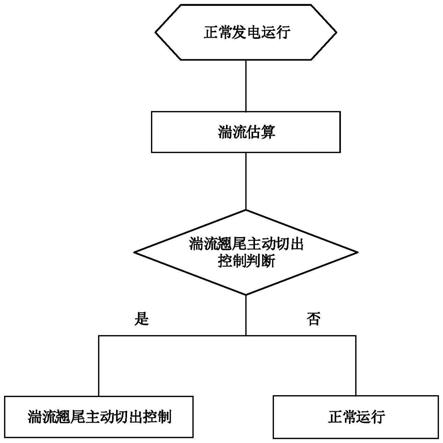
22.图1为本发明的方法在实施例的流程图。
23.图2为本发明的主动切出控制退出在实施例的流程图。
24.图3为本发明的转矩控制方式示意图。
25.图4为本发明的桨距控制方式示意图。
具体实施方式
26.以下结合说明书附图和具体实施例对本发明作进一步描述。
27.如图1所示,本实施例的风电机组湍流翘尾的主动切出控制方法,包括步骤:
28.1)在风电机组运行过程中,获取风电机组的湍流信息和风速信息;
29.2)将湍流信息和风速信息分别与对应的预设阈值进行对比;当湍流信息和风速信息均大于对应的预设阈值时,则判断湍流翘尾,进入湍流翘尾主动切出控制。
30.本发明在湍流信息和风速信息均大于对应的预设阈值时,判断湍流翘尾,进入湍流翘尾主动切出控制,保证了湍流翘尾下风电场开发建设和延续性以及机组的安全性;方法整体安全高效且易实现,在不增加硬件成本的基础上安全解决湍流翘尾问题,通用性强;其中采用机组的湍流信息和风速信息进行组合判断,保证了安全性和准确性,同时减少了误动作。
31.在一优选实施例中,湍流翘尾主动切出控制包括对机组的转矩指令和桨距指令;转矩指令按斜率下降或按转速转矩进行插值;桨距指令为固定速率或按桨距角和变桨速率进行插值。通过对转矩指令和桨距指令进行多样性的特性调节,保证了风机安全。
32.在一优选实施例中,在步骤2)之后,还包括湍流翘尾主动切出控制退出方法,从而
能够及时响应机组当前环境信息,合理调节启停机动作,有效的减小发电性能的损失。控制退出方法具体为:在转矩和桨距指令执行到位后,再次结合机组湍流信息以及风速信息进行判断;当机组湍流条件以及风速条件满足复位启机后,机组复位启机,执行正常启机发电过程,否则机组继续停机等待。具体地,指令执行到位是指:通过对桨距和转矩的开环设计,令转矩指令按时间斜率下降至零或按发电机转速插值,同时等待桨距指令执行到位。
33.在一优选实施例中,在步骤2)中,湍流信息对应的预设阈值为+2m/s,湍流信息对应的预设阈值为1.5倍设计湍流值;在300s滑窗滤波的平均风速值大于额定风速+2m/s,且3s滑窗滤波的估算湍流值大于风场设计湍流的1.5倍,则判断湍流翘尾。
34.本发明还公开了一种风电机组湍流翘尾的主动切出控制系统,包括:
35.第一模块,用于在风电机组运行过程中,获取风电机组的湍流信息和风速信息;
36.第二模块,用于将湍流信息和风速信息分别与对应的预设阈值进行对比;当湍流信息和风速信息均大于对应的预设阈值时,则判断湍流翘尾,进入湍流翘尾主动切出控制。
37.本发明的控制系统,用于执行如上所述的控制方法,同样具有如上控制方法所述的优点。
38.本发明进一步公开了一种风电机组湍流翘尾的主动切出控制装置,包括湍流估算模块、湍流翘尾主动切出控制判断模块、湍流翘尾主动切出控制模块和湍流翘尾主动切出控制退出判断模块。具体地,在风机正常发电运行过程中,首先利用湍流估算模块,估算机组当前湍流信息;接下来利用湍流翘尾主动切出控制判断模块进行主动切出控制判断,判断结果为是,进行主动切出控制;若判断结果为否,风机正常运行。其中湍流翘尾主动切出控制判断模块的核心理念为湍流信息判断,同时结合翘尾的特点引入风速并行条件,提高判断的精准性。湍流翘尾主动切出控制模块在判断需要进行湍流翘尾主动切出控制后,对风电机组按照预定的转矩和桨距指令进行控制,其主要控制对象为机组的转矩和桨距执行机构。其中控制特性多样,转矩指令可以是按斜率下降也可以是按转速转矩进行插值,如图3所示;桨距指令可以是固定速率也可以是按桨距角和变桨速率进行插值,如图4所示。湍流翘尾主动切出控制退出判断模块用来判断机组湍流翘尾主动切出控制是否执行完毕,判断结果为是,机组进行复位启机;若判断结果为否,机组继续停机等待。
39.本发明进一步公开了一种计算机可读存储介质,其上存储有计算机程序,计算机程序在被处理器运行时执行如上所述的风电机组湍流翘尾的主动切出控制方法的步骤。本发明还公开了一种计算机设备,包括存储器和处理器,存储器上存储有计算机程序,计算机程序在被处理器运行时执行如上所述的风电机组湍流翘尾的主动切出控制方法的步骤。本发明实现上述实施例方法中的全部或部分流程,也可以通过计算机程序来指令相关的硬件来完成,计算机程序可存储于一个计算机可读存储介质中,该计算机程序在被处理器执行时,可实现上述各个方法实施例的步骤。其中,计算机程序包括计算机程序代码,计算机程序代码可以为源代码形式、对象代码形式、可执行文件或某些中间形式等。计算机可读介质可以包括:能够携带计算机程序代码的任何实体或装置、记录介质、u盘、移动硬盘、磁碟、光盘、计算机存储器、只读存储器(rom,read-only memory)、随机存取存储器(ram,random access memory)、电载波信号、电信信号以及软件分发介质等。本发明实现上述实施例方法中的全部或部分流程,也可以通过计算机程序来指令相关的硬件来完成,计算机程序可存储于一个计算机可读存储介质中,该计算机程序在被处理器执行时,可实现上述各个方法
实施例的步骤。其中,计算机程序包括计算机程序代码,计算机程序代码可以为源代码形式、对象代码形式、可执行文件或某些中间形式等。计算机可读介质可以包括:能够携带计算机程序代码的任何实体或装置、记录介质、u盘、移动硬盘、磁碟、光盘、计算机存储器、只读存储器(rom,read-only memory)、随机存取存储器(ram,random access memory)、电载波信号、电信信号以及软件分发介质等。
40.下面结合附图和一个完整的具体实施例对本发明作进一步说明:
41.如图1所示,风机正常发电运行过程中,通过实时估算机组湍流信息、风速信息、转速信息,在湍流信息以及测量风速信息满足湍流翘尾主动切出判断条件后(如湍流翘尾主动切出判断条件可以设置为:300s滑窗滤波的平均风速值大于额定风速+2m/s,且3s滑窗滤波的估算湍流值大于风场设计湍流的0.5倍(如设计湍流为0.12,湍流翘尾中湍流判断为估算湍流值(3s滑窗平均)大于0.18)),进行主动切出控制。
42.湍流翘尾主动切出控制就是在检测到湍流翘尾的状况下,对机组的转矩指令和桨距指令进行主动控制。其控制方式多样,转矩指令可以是按斜率下降也可以是按转速转矩进行插值,如图3所示;桨距指令可以是固定速率也可以是按桨距角和变桨速率进行插值,如图4所示。通过对转矩指令和桨距指令进行主动切出控制来降低湍流翘尾工况下机组的极限载荷,保证机组关键部件的安全。
43.湍流翘尾主动切出控制退出判断在转矩和桨距指令执行到位后(指令执行到位是指:通过对桨距和转矩的开环设计,令转矩指令按时间斜率下降至零(如800nm/s的下降斜率)或按发电机转速插值(当发电机转速小于并网转速(如1050rpm)后,令转矩指令降至零),同时等待桨距指令执行到位(三叶片桨距角到顺桨位桨距角(一般为90deg)),再次结合机组湍流信息以及风速信息进行判断机组下一步动作,当机组湍流条件以及风速条件满足复位启机后,机组复位启机,执行正常启机发电过程;否则机组继续停机等待。
44.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1