一种IPU控制器速度补偿方法与流程
一种ipu控制器速度补偿方法
技术领域
1.本发明涉及车辆发电机控制技术领域,特别是涉及一种ipu控制器速度补偿方法。
背景技术:
2.凸轮轴是活塞发动机里的一个部件。它的作用是控制气门的开启和闭合动作。虽然在四冲程发动机里凸轮轴的转速是曲轴的一半(在二冲程发动机中凸轮轴的转速与曲轴相同),不过通常它的转速依然很高,而且需要承受很大的扭矩,因此设计中对凸轮轴在强度和支撑方面的要求很高,其材质一般是优质合金钢或合金钢。由于气门运动规律关系到一台发动机的动力和运转特性,因此凸轮轴设计在发动机的设计过程中占据着十分重要的地位。
3.凸轮轴的主体是一根与气缸组长度近似相同的圆柱形棒体。上面套有若干个凸轮,用于驱动气门。凸轮轴是通过凸轮轴轴颈支撑在凸轮轴轴承孔内的,因此凸轮轴轴颈数目的多少是影响凸轮轴支撑刚度的重要因素。如果凸轮轴刚度不足,工作时将发生弯曲变形,影响配气定时。
4.凸轮的侧面呈鸡蛋形。其设计的目的在于保证气缸充分的进气和排气。另外考虑到发动机的耐久性和运转的平顺性,气门也不能因开闭动作中的加减速过程产生过多过大的冲击,否则就会造成气门的严重磨损、噪声增加或是其它严重后果。因此,凸轮和发动机的功率、扭矩输出以及运转的平顺性有很直接的关系。
5.柴油发动机转动是通过缸内活塞往复运动带动凸轮转动实现的。是一个直线运动转换为旋转运动的过程,在活塞往复运动过程中,发动机实际输出力矩是有较为明显波动的,这种力矩波动会导致实际输出转速在目标转速上下波动。在大功率运行工况,最高转速和最低转速的速度差会有100rpm的差距。这种速度波动较大会导致整车运行有较大的震动和异响。
技术实现要素:
6.鉴于现有技术中存在的问题,本发明一种ipu控制器速度补偿方法,其特征在于:所述ipu控制器包括发动机、发动机控制器、发电机和发电机控制器;
7.所述方法包括以下步骤:
8.步骤(1):所述发电机根据自身转子当前位置估算所述发动机凸轮位置;
9.步骤(2):根据当前所述发电机速度、功率、所述发动机凸轮位置计算发电机补偿扭矩;
10.步骤(3):基于发电功率的目标扭矩基础上,加上补偿扭矩进行实际扭矩输出;
11.步骤(4):监控当前反馈速度波动范围,修正所述发电机补偿扭矩相关控制参数。
12.优选地,在步骤(1)中,所述估算方法是通过传感器采集上所述凸轮的位置,然后结合所述发电机转子的位置得到准确的所述凸轮位置。
13.优选地,在步骤(1)中,采集不同速度、不同功率、不同凸轮位置情况下所述发动机
输出的力矩,以“在不同情况下,输出力矩恒定”为原则,确定所述发电机补偿扭矩,以此为依据形成一条曲线,依据该曲线计算所述发电机补偿扭矩。
14.优选地,在步骤(4)中,所述相关控制参数为扭矩步长。
15.优选地,所述ipu控制器用于增程式混合动力底盘上。
16.优选地,所述发动机和所述发动机控制器作为原动机,工作在速度模式;所述发电机和所述发电机控制器作为发电机设备,工作在扭矩模式。
17.与现有技术方案相比,本发明至少具有以下有益效果:
18.1)上述ipu控制器的速度补偿方法。可以极大的减小发动机调速模式下的速度波动范围。
附图说明
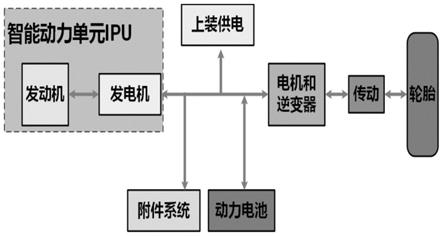
19.图1是ipu混合动力底盘的结构图;
20.图2是本发明发电机组结构框图;
21.图3是发动机输出力矩的波动图。
22.下面对本发明进一步详细说明。但下述的实例仅仅是本发明的简易例子,并不代表或限制本发明的权利保护范围,本发明的保护范围以权利要求书为准。
23.随着技术的发展,人工智能(ai)技术得到广泛的运用,未来人工智能技术更是全球的重点发展方向,而作为人工智能的核心,智能化处理单元ipu(intelligent processing unit)更是整个技术的关键,其被广泛的应用于各领域,以实现各领域的人工智能。
24.如图1所示,智能化处理单元(ipu)用于增程式混合动力底盘上,与动力电池一起,作为底盘的能量源,给底盘各高压驱动部件提供电力。智能化处理单元(ipu)用于给上装供电、给附件系统供电、给动力电池充电并给电机和逆变器提供电源;电机通过传动系统驱动轮胎;车辆的各种传感器将采集轮胎信息、电机信息、电池信息等反馈给智能化处理单元(ipu)进行处理。
25.如图2所示,发电机组由发动机及其控制器、发电机及发电机控制器、ipu控制器,故发电机组也可以被称为ipu;其中(1)发动机和发动机ecu作为原动机,工作在速度模式;(2)发电机和发电机控制器作为发电机设备,工作在扭矩模式。一般来说,系统运行转速完全由发动机调速控制,发电机只需要按照功率需求输出对应扭矩即可。
26.针对以上描述的发电工况,本发明提出了一种基于发动机凸轮轴旋转位置的主动控制算法,通过调整发电机输出扭矩步长发动机输出的扭矩,以实现发动机旋转转速的稳定性。达到减轻车辆震动和异响的目的。
具体实施例
27.下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
28.本发明提供了一种ipu控制器的速度补偿方法,步骤为:
29.步骤(1):发电机根据自身转子当前位置估算发动机凸轮位置;
30.步骤(2):根据当前速度、功率、凸轮位置计算发电机补偿扭矩;
31.步骤(3):基于发电功率的目标扭矩基础上,加上补偿扭矩进行实际扭矩输出;
32.步骤(4):监控当前反馈速度波动范围,修正电机补偿扭矩相关控制参数。
33.其中,步骤(1):发电机根据自身转子当前位置估算发动机凸轮位置,具体估算方法是通过传感器采集凸轮的位置,然后结合发电机转子的位置得到准确的凸轮位置;这是因为发电机的结构使得转子旋转一周凸轮也旋转一周,但是凸轮具有720度的角度,而发电机转子只有360度的角度,即发电机转子旋转两周,凸轮旋转两周才是一个完整的周期,而转子的位置就是用于确认凸轮属于0
‑
360度还是361
‑
720度。
34.步骤(2)根据当前速度、功率、凸轮位置计算发电机补偿扭矩;具体计算方法为采集各速度、各功率、各凸轮位置情况下发动机输出的力矩,以“在各种不同情况下,输出力矩恒定”为原则,确定电机补偿扭矩,将各个补偿扭矩形成一个曲线,依据该曲线计算发电机补偿扭矩。
35.上述ipu控制器的速度补偿方法。可以极大的减小发动机调速模式下的速度波动范围。
36.以上详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种简单变型,这些简单变型均属于本发明的保护范围。
37.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。
38.此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本发明的思想,其同样应当视为本发明所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1