用于运行内燃机的方法、控制器和内燃机与流程
1.本发明涉及一种在应用神经网络(nn)的情况下用于运行内燃机的方法,特别是一种用于调节空气燃料比的方法,一种用于在应用按照本发明的方法的情况下运行内燃机的控制器,以及一种内燃机,在所述内燃机上可以实施按照本发明的方法。
背景技术:
2.在应用对空气燃料比的调节,或者换句话说应用λ调节的内燃机中,基本上在考虑预测的充气和与运行点相关的λ理论值的情况下计算燃料喷射量理论值。在此,燃料喷射量理论值应采用确定的值,以便在废气排放管路的废气催化器的上游获得期望的λ。所期望的λ理论值通常是化学计量的比例为1,以便在废气催化器中获得废气排放的最优转化。为此,在与运行点相关的预控中计算基于综合特性曲线的基本燃料喷射量。此外,这能够通过不同的修正因数来改变,这些修正因数考虑无法检测的干扰以及模型和过程不稳定性,所述干扰以及模型和过程不稳定性导致λ理论值与测量出的λ实际值之间的差。所述λ实际值通常通过设置在废气催化器的下游的氧气传感器来查明。仅仅由于穿过废气排出管路和废气催化器的废气的流动的在时间上的延迟,基于气体动力学而形成在λ理论值与实际值之间的差,或者换句话说,形成调节偏差。为了抵消所述差而使用调节器,所述调节器根据这样的方式改变燃料喷射量,以便使调节偏差最小化。
3.在此,在现有技术中建立调节系统,所述调节系统使用pid调节器并且通过使用可变的区段时间常数并且在考虑停机时间的情况下应该特别是使气体动力学的影响最小化。
4.在de 10 2015 210 381 a1中公开一种用于利用λ调节来运行内燃机的方法,其中按照λ实际值与所生成的λ理论值来计算λ调节偏差。λ理论值的生成包括对λ实际值的经历运行时间的和延迟的检测的适配。将根据这种方式计算出的λ调节偏差输送给调节单元,所述调节单元包括pid调节器并且输出调节器燃料量。基于综合特性曲线的、由预控计算出的基础燃料量修正了调节器燃料量以及常规的自适应燃料量。附加地,将从内燃机吸气管中测量出的空气质量偏差换算为干扰燃料量并且同样修正基础燃料量。以这种方式和方法应该抵消区段停机时间的影响和常规的λ调节的突变式的动态性的影响。
5.然而常规的λ调节系统由于功能而经受如下缺点,即常规的λ调节系统当出现调节偏差时才能对所述调节偏差做出反应,其中强制地形成对燃料喷射量理论值的延迟的适配。在此,可能导致λ调节中的增强的振荡和因此导致气体溢出。为了使λ调节系统的反应时间如下地最小化,备选于pid调节器也应用nn。
6.在jp3144264b2中公开一种λ调节系统,其中使用nn以便计算燃料喷射量修正因数,所述燃料喷射量修正因数是喷射量修正的输入参量并且在此被加到基于综合特性曲线的基础喷射量以及其它的常规的喷射量修正因数上。因此,nn补充常规的λ调节并且实时计算估算的λ实际值。nn的输入参量是借助传感器测量的内燃机物理特性参量,包括发动机转速、吸入空气压力、节气门位置、冷却剂温度、吸入空气温度、λ实际值以及计算出的特性参量,包括agr率和理论喷射量。
7.在ep 1 854 984 a1中公开一种用于控制内燃机的λ比例的方法,其中通过nn来代替常规的λ调节,nn实时地且与内燃机的曲轴转速同步地计算所估算的λ实际值。为此,nn处理内燃机的物理特性参量的当前值作为输入参量,包括当前的燃料喷射量、燃料喷射持续时间、发动机转速、冷却水温度、吸气管空气压力以及基于所测量的气缸内压计算出的区段停机时间。输出参量在此是计算出的λ实际值,该λ实际值附加地经受漂移补偿,该漂移补偿应该考虑内燃机及其传感器和组件的老化。此外,经修正的计算出的λ实际值是燃料喷射量计算的输入参量,将所测量的λ实际值也汇入到所述燃料喷射量计算中。该方法可以与关于λ调节的常规的反馈控制并行地应用,并且应该消除λ调节的时间延迟,以及特别是在内燃机的如下运行状态中显著地降低废气排放,在所述运行状态中用于检测λ实际值的传感器停止运行。
8.尽管通过应用nn使反应时间最小化,常规的λ调节系统仅对已形成的偏差做出反应,并且因此还经受由于区段停机时间引起的时间延迟。此外,用于计算在常规的λ调节系统中的修正因数的输入参量仅基本上由描述基本运行状态和燃烧的内燃机物理特性参量组成,如负荷和转速、燃料喷射量和喷射时刻、可供使用的空气量的温度和质量以及必要时其它已知的特性参量。
技术实现要素:
9.本发明的目的
10.本发明的目的在于,提供一种用于运行内燃机的方法,其中,通过系统修正因数来补充λ调节,所述系统修正因数在应用nn的情况下预测未来调节偏差并且将所述未来调节偏差以如下方式引入到λ调节中,从而在未来的λ调节偏差形成之前就已经将其抵消;以及提供一种用于在内燃机上实施按照本发明的方法的控制器,和一种在应用按照本发明的方法的情况下运行的内燃机。
11.所述目的的解决方案
12.所述目的通过根据权利要求1所述的方法、根据权利要求9所述的控制器以及根据权利要求10所述的内燃机实现。
13.本发明的描述和优点
14.本发明的意图在于,给技术系统的现有的调节回路补充nn,所述nn计算系统修正因数,所述系统修正因数采用如下值,以便获得技术系统的调节参量的所期望的特性。在包含对于技术系统能访问的全部信息的情况下,所期望的特性在此首先包括使调节参量的调节偏差最小化。在一种有利的实施形式中,nn以获得整个技术系统的所期望的特性的方式来影响调节参量。
15.在一种实施形式中,技术系统是内燃机,并且调节参量是废气质量流的λ值,该λ值在废气排出管路之内出现在废气催化器的下游。调节参量λ的期望的特性在此是保持λ实际值为1,该λ实际值是化学计量的比例,从而在废气催化器之内实现废气排放的最优转化。λ实际值通常通过在废气排出管路之内设置在废气催化器的上游的氧气传感器测量。现在,nn计算系统修正因数,该系统修正因数对应于预测的λ调节偏差并且由内燃机的技术系统以如下方式处理,使内燃机的未来运行状态的λ调节偏差最小化。
16.在一种备选的实施形式中,nn计算系统修正因数,所述系统修正因数代替未来的λ
调节偏差而对应于如下值,所述值不再被设计用于使λ调节偏差最小化,而是直接旨在以如下方式影响整个技术系统,使得在每个运行点中形成为1的λ实际值。
附图说明
17.为了更好地理解并且有助于描述而参考以下各图。图中:
18.图1示出在内燃机1的控制器2之内的调节系统3,
19.图2示出用于nn的自动的特征选择的结构构造,
20.图3示出用于实施按照本发明的方法的nn,
21.图4示出用于借助强化学习来优化nn的方法流程,
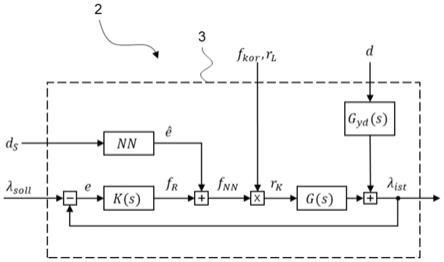
22.图5示出内燃机的λ调节。
具体实施方式
23.按照本发明的方法应该以有利的方式和方法应用到未示出的内燃机1的控制器2上并且实时地实施计算。为了满足这些要求,按照本发明的方法包含以下有利的特征组合:
[0024]-借助特征子系统选择(fss)来自动地选择用于nn的输入参量;
[0025]-借助记录的测量数据来训练nn;
[0026]-借助于强化学习(reinforcement-learning,rl)来优化在内燃机1的整个技术系统上的nn;
[0027]-在与运行点相关的预测视野内预告系统特性;
[0028]-产生系统修正因数以用于直接影响所预测的未来的系统特性。
[0029]
按照图1,在内燃机1的控制器2上实施按照本发明的方法,其中,如下面所描述的那样,将nn集成到调节系统3中。按照本发明的控制器2在此包括调节调节参量y的至少一个调节系统3。为此,第一输入参量是理论值w,在第一步骤中将所述理论值与调节参量y的实际值相比较,以便确定调节偏差e。所述调节偏差e是补偿环节k(s)的输入参量。设计补偿环节k(s),以用于实施计算,以便产生调节器调整参量ur。在补偿环节k(s)中实施的计算的方式和方法对于实施按照本发明的方法而言是不重要的,并且可以满足任何已知的或单独创建的结构,以及处理任意数量的另外的输入参量。根据这种方式产生的调节器调整参量ur可以在接着的步骤中以已知的方式和方法与自适应的修正因数f
kor
相乘(所述自适应的修正因数用于漂移补偿或者考虑在调节系统3的长时间特性中的变化),并且相应地输出经修正的调节参量u
kor
,所述经修正的调节参量构成调节段g(s)中的输入参量。调节段g(s)通常受干扰影响。可以通过干扰段gyd(s)来描述干扰的作用。调节段的输出因此与干扰段的输出叠加。产生测量出的调节参量y。调节段g(s)以及各个干扰段gyd(s)的类型对于实施按照本发明的方法而言是不重要的,并且可以满足任何已知的或单独创建的结构,以及处理任意数量的另外的输入参量。在此,将干扰参量的全部概括为干扰d。
[0030]
目前描述的和已知的调节系统具有理论值w-实际值y均衡的系统动态性和关于无法预见的干扰d的反应特性的所提到的缺点。作为补救,现在使常规存在的调节系统按照本发明地有利地扩展了nn,该nn同样将干扰d作为输入参量进行处理并且计算预测调节偏差
ê
。所述预测调节偏差
ê
在任意的计算操作r中与调节器调整参量ur汇集,并且以这种方式和方法产生系统修正因数亦或nn调整参量u
nn
,通过调节系统3根据已知的方式继续处理所述
nn调整参量。在此,基于技术系统的通过nn学习的系统特性,所述预测调节偏差
ê
应该预告调节参量y的未来偏差并且抵消这些未来偏差。
[0031]
在按照本发明的方法的一种有利的实施形式中,以这种方式来设计nn的训练和计算,即,预测调节偏差
ê
的影响使未来的实际调节偏差e最小化。
[0032]
在按照本发明的方法的一种备选的有利的实施形式中,借助rl以这种方式来优化nn,即,所述nn的输出表示使预测调节偏差
ê
最小化的全部的补偿参量。
[0033]
在按照本发明的方法的另一种备选的有利的实施形式中,以这种方式来设计nn的训练和计算,即,预测调节偏差
ê
的影响有针对性地改变技术系统的另外的特性参量的值,并且因此产生所期望的系统特性。
[0034]
优选地,技术系统是车辆的内燃机1,其中,调节系统3对应于内燃机1的λ调节并且在车辆内部的控制器2上实施,该控制器设置在内燃机1上或者至少设置在车辆之内。在此,理论值w是λ理论值λ
soll
,所述λ理论值例如可以由在控制器2之内的预控来计算。调节参量y现在对应于λ实际值λ
ist
,所述λ实际值可以通过氧气传感器来确定。调节偏差e因此是λ理论值λ
soll
与λ实际值λ
ist
的差。补偿环节k(s)在此可以是已知的λ调节器并且例如表示为pid调节器、“内模控制”imc或者其他的调节方法。调节器调整参量ur可以是内燃机1的物理特性参量,特别是是燃料量的当量,特别是无单位的特性参量的当量、如相对燃料量或燃料率,其相应于物理的燃料量或燃料率的百分比份额。相应地,通过nn算出的预测调节偏差
ê
可以是无单位的数值,以便在应用计算操作r的情况下定量地影响燃料量的当量。计算操作r优选是加法并且备选地也可以是任何其它的计算操作r。nn调整参量u
nn
现在相应于燃料量的通过nn修正的当量。nn调整参量u
nn
此外可以通过一个或多个修正因数f
kor
来修正。修正因数f
kor
可以考虑内燃机1以及内燃机的各个组件的老化和/或表示未示出的废气催化器或整个废气设备的热老化。在按照本发明的方法的一种实施形式中,所述修正因数f
kor
中的至少一个修正因数是反映所需要的空气质量r
l
的当量的特性参量,使得经修正的调节参量u
kor
相应于所需要的相对燃料量rk。
[0035]
在一种实施形式中,所述干扰d包括:多个物理特性参量、通过控制器2的软件给出的模型参量、通过控制器2处理的控制器特性参量和/或通过传感器接收的测量参量,这些参量以下用上位概念“干扰参量d
s”来概括。nn的输入参量包括有限数量的干扰参量ds,优选地按照本发明,这些干扰参量有利地借助于自动地识别重要的测量参量(feature-subsystem-selection,特征子系统选择,fss)来选择。
[0036]
在图2中示出用于实施fss过程的方法流程的系统的结构构造,其中,输入参量是测量数据5并且必要时是对技术系统的使用范围的要求,所述要求可以由人类用户8设置。在一种实施形式中,在行驶车辆4期间记录测量数据5,应该在所述车辆的内燃机1上应用按照本发明的方法。在此可以将测量数据5和其它要求存放在外部处理单元6上在数据结构7中,所述数据结构设计用于合并多个测量数据5并且为进一步处理做准备。按照这种方式合并的测量数据5可以作为训练数据储存在数据库13中。外部处理单元6可以是如下服务器,在该服务器上自动运行fss并且可以将测量数据5传输到该服务器上。在本发明的意义下的测量数据5包括测量参量、信号或参数的时间序列、通过内燃机1的控制器2的软件给出的模型参量的时间序列、通过控制器2处理的控制器特性参量和/或通过传感器接收的测量参量的时间序列。通过控制器2处理的测量参量、信号或参数以下被称为测量特性参量。所述测
量特性参量因此包括能够由控制器2检测、处理和输出的参量。
[0037]
fss的意图是自动地选择如下测量特性参量,所述测量特性参量的变化对所期望的调节参量y的变化或在时间上的变化曲线具有尽可能大的影响。为此,可以将测量数据5传递到数据过滤器9中,该数据过滤器设计用于识别在时间上恒定的测量特性参量并且将其从测量数据5中去除。按照这种方式去除的测量特性参量可以出于记录目的而写入到过滤器矩阵15中。此外可以将按照这种方式过滤出的测量数据5传递到相关过滤器10中,该相关过滤器设计用于过滤如下测量特性参量,所述测量特性参量的在时间上的变化曲线具有高的相关性。具有相同或相似的时间变化曲线的测量特性参量对于本领域技术人员来说可能无法乍一看就看出,因为当前的控制器2处理可以直接或间接地彼此相关的多个测量特性参量。相同的时间变化曲线因此可能对调节参量y具有冗余的影响,并且在并行处理时不提供增值以及提高所需要的计算容量。按照这种方式去除的测量特性参量可以出于记录目的而写入过滤器矩阵15中。可以将按照这种方式过滤出的测量数据5传递到缩放过滤器11中,所述缩放过滤器设计用于缩放各个测量数据的时间变化曲线,以便产生能等值处理的测量数据5。在一种实施形式中,附加地存储测量数据的计算出的梯度。按照这种方式经缩放的测量数据5可以作为训练数据储存在数据库13中。可以将按照这种方式过滤出的测量数据5传递给特性参量选择过滤器12,所述特性参量选择过滤器设计用于分析在现有的测量数据5之内的各个测量特性参量对调节参量y的影响并且与人类用户8的要求一起来选择确定数量的测量特性参量。可以将按照这种方式过滤出的测量特性参量写入到干扰参量矩阵14中并且现在被视为构成nn的输入参量的干扰参量ds。
[0038]
借助fss选择各个干扰参量ds是已知的方法,并且所描述的结构构造不应限制按照本发明的方法,而仅应作为实施例理解。备选地,可以应用fss的任何其它形式,以便从内燃机1的控制器2的可供使用的多个测量特性参量中、从任意数量的测量数据5中识别和提取有限数量的干扰参量ds。在一种实施形式中,按照这种方式提取的干扰参量ds的数量小于1000、优选小于100。
[0039]
在当前的控制器2上处理多个测量特性参量以及在控制器2的功能之内产生和进一步处理新的特性参量,所述新的特性参量乍一看与实际的调节参量y没有直接的物理联系。在一种实施形式中,技术系统是内燃机1并且调节参量y是λ实际值λ
ist
,在这种实施形式中,由于对测量特性参量或者在控制器(2)之内的其它特性参量的表示进行计算(verrechnung)而导致各个测量特性参量对λ实际值λ
ist
的作用不同。据此,存在多个测量特性参量,这些测量特性参量的作用对于本领域技术人员来说基于其关于所应用的内燃机1的构造和工作原理的知识无法直接地看出。按照本发明有利地,根据对fss取平均值识别出的测量特性参量包括在常规的λ调节系统中不被考虑的测量参量、信号、参数或其它物理特性参量。所选择的干扰参量ds因而仅适用于内燃机1的特定的构造并且与内燃机的应用相关联,该应用例如可以是车辆4的驱动器。对于具有不同构造或不同应用的其它内燃机1,可以通过fss的方法选择不同的特定的测量特性参量,从而为相应的技术系统自动地并且符合应用地选择干扰参量ds。在本发明的意义下在构造方面相区分的内燃机1可以具有不同的机械构造,或者在机械构造相同的情况下包括具有不同软件的控制器2。在本发明的意义下在内燃机的应用方面相区分的内燃机1可以是结构相同的内燃机1,这些内燃机设置在不同的车辆中或者这些内燃机是在不同的驱动系统中的部件。
[0040]
在图3中示出nn的结构构造,该nn设计用于实施按照本发明的方法。nn包括一个输入层、任意数量k个隐藏层以及一个输出层。输入参量xn包括任意数量的干扰参量ds。在按本发明的方法的实时应用期间,所述输入参量xn反映在时间上的变化曲线x(t)。在按照本发明的方法的一种有利的实施形式中,对于每个单独的输入参量xn(t),输入参量xn包括先前的时间步长xn(t-1)以及所述先前的时间步长之前的另一个时间步长xn(t-2)。备选地,任何任意数量的再之前的时间步长可以用作nn的附加的输入参量xn。通过使用以往的时间步长xn(t-1)、xn(t-2),按照本发明的nn考虑通过fss识别为重要的干扰参量ds的输入参量xn的紧邻的历史。nn的输入层现在具有xm维。在通过fss识别出的干扰参量ds的数量为30个并且考虑输入参量xn的时间序列历史的最后两个时间步长xn(t-1)、xn(t-2)的实施形式中,在该实施形式中,输入层的维度相应地包括m=90的尺寸。
[0041]
每个隐藏层k包括任意数量mk的神经元其中,每个神经元配置有阈值以及权重所述阈值和权重的数量等于神经元的与先前的层k-1的维度m
k-1
相等的数量mk。nn的任意一个神经元的输出相应地根据等式1如下计算:
[0042][0043]
在此,fa是神经元的激活函数。在按照本发明的方法的一种实施函数中,所述激活函数fa根据等式2计算。
[0044]
fa=σ(x)=max(0,x)
ꢀꢀ
(等式2)
[0045]
备选地,可以使用适用于以已知的方式和方法计算nn的任何另外的激活函数。输出层包括一个神经元,该神经元的输出包括预测调节偏差
ê
。所述预测调节偏差
ê
根据如下的等式3计算。
[0046][0047]
在此,fe是输出层的激活函数,vi是输出层的权重,该权重与最后的隐藏层k的维度的最大数量mk相对应,以及θ是输出层的阈值。在按照本发明的方法的一种实施形式中,输出层的激活函数fe是隐藏层的激活函数fa,从而适用等式4。
[0048]
fe=fa=σ(x)=max(0,x)
ꢀꢀ
(等式4)
[0049]
备选地,对于fe,可以使用适用于以已知的方式和方法计算nn的任何另外的激活函数。在一种实施形式中,隐藏层k具有小于100、优选小于10、特别优选小于5的有限的数量。在此,隐藏层包括维度mk,各维度分别包括最大数量的神经元所述最大数量小于1000、优选小于或等于100。
[0050]
在一种实施形式中,所述输入参量xn包括对于λ调节已知的物理参量:发动机转速、发动机转矩、吸入空气压力、吸入空气温度、节气门位置、冷却剂温度、agr率、λ实际值、λ理论值、燃料喷射量实际值、燃料喷射量理论值以及缸内压力。
[0051]
在一种有利的实施形式中,输入参量xn包括在fss之后识别出的干扰参量ds,所述干扰参量包括如下另外的测量特性参量,所述另外的测量特性参量可以配置给发动机燃
烧、空气路径、燃料箱系统、喷射系统、发动机增压以及废气再处理的组。在此,特别是可以涉及测量值、传感器值、模型值以及msg值。在本发明的意义中,测量值可以是来自于通过测量器件(如传感器或相似物)测量并且在控制器之内被进一步处理的测量特性参量、如质量流、在数学上过滤的或标准化的物理测量特性参量等。在本发明的意义中,传感器值可以是如下测量特性参量,所述测量特性参量是直接通过传感器检测的真实物理参量的当量、如压力、温度等。在本发明的意义中,模型值可以是如下测量特性参量,所述测量特性参量反映物理特性参量、测量值、传感器值等,然而不直接由测量出的测量特性参量得出,而是通过数学模型来估算,如经建模的质量流或压力、混合物成分等。在本发明的意义中,msg值可以是通过内燃机1的控制器2计算出的参量,这些参量同样可以反映测量特性参量或者包括调整或调节参量的时间变化曲线。
[0052]
为了将根据这种方式产生的nn用于应用中,按照图4借助强化学习或者换句话说借助reinforcement-learning(rl)来优化nn。在第一步骤s01中,将初始产生的nn集成到车辆4的内燃机1的控制器2中。可以借助测量数据对所述初始产生的nn进行预训练。在一种实施形式中,可以将nn在软件方面作为旁路集成到控制器2的已有的软件中,从而通过nn获得真实的测量结果,然而这些真实的测量结果可能选择性地不损害或者选择性地明确地损害车辆4或内燃机1的运行。备选地,可以将nn直接集成到现有的软件中,其方式为,使计算出的预测调节偏差
ê
汇入到λ调节的计算中并且对车辆4或内燃机1的运行具有直接影响。在接着的步骤s02中,利用具有nn17的车辆实施测量行驶,以便产生测量数据18。在接着的步骤s03中,分析和评价所述测量数据18。对所述测量数据18的分析可以是对测量结果的调整,特别是nn的输出以及在λ理论值(λ
soll
)与λ实际值(λ
ist
)之间的由此获得的差是绝对的或者与提出的要求相比较。在一种实施形式中,提出的要求可以包括在废气催化器中在经转化的排放物方面的比较。为此可以考虑不同的比较特性参量或标准。标准可以是确定废气催化器的相对填充度或所述相对填充度的变化的质量标准。
[0053]
对于本领域技术人员来说,废气催化器的相对填充度作为处于废气催化器中的氧气量的百分比的表示已知。此外已知的是,例如在汽油发动机的三通催化器中,l
o2
=0.5的相对填充度导致有害物质碳氢化合物(hc)、一氧化碳(co)以及氮氧化物(no
x
)的最优转化。这意味着,例如在三通催化器的与运行点相关的储存容量中,当氧气量为m
o2
=1g时,理想的氧气填充度为0.5g
o2
。当前氧气量m
o2
的变化可以根据等式5得以平衡。
[0054][0055]
在此,λ
ein
是输送给三通催化器的废气质量流的λ值。三通催化器的上游的λ值λ
ein
优选地可以利用位于三通催化器上游的氧气传感器确定。关于常规的λ调节3与按照本发明的方法的比较的可能的标准不应限制于这里所反映的质量评价标准。备选地,可以提出另外的标准,以及使用内燃机1的任何类型的燃烧方法以及废气催化器的任何形状和任何构造。
[0056]
按照步骤s03,可以由人类用户8实施对测量数据18和nn的评价。在此,这特别是可以检查按照本发明的方法的结果是否符合所提出的要求,或者是否应该继续优化nn 19。如果满足了要求或者如果当前优化迭代的nn不具有或仅具有不重要的改善结果,则可以在接着的步骤s04中结束rl。如果还存在改善潜力,那么在接着的步骤s05中继续训练nn,在该步
骤中,对nn的权重或其它参数进行适配。在接着的步骤s06中,将根据这种方式重新训练的nn 20重新集成到车辆17中并且可以实施分析和评价的继续的迭代。在按照本发明的方法的一种实施形式中,在训练s05期间,nn学习对λ调节3的误差和因此调节偏差e的预测,并且产生预测调节偏差
ê
,以便使λ调节3的未来的误差最小化。
[0057]
在一种有利的实施形式中,这样训练nn s05,代替λ调节3的预测调节偏差
ê
而产生系统修正因数f
nn
,以便在未来的时间步长中以如下方式影响内燃机1,以便产生为0的调节偏差e。备选地,可以这样训练nn s05,以便在未来的时间步长中,由确定的值产生废气催化器的氧气填充m
o2
、优选为与运行点相关的最大氧气加载的0.5。备选地,可以这样训练nn s05,以由确定的值产生λ实际值λ
ist
(优选为1)。
[0058]
按照本发明按照图1,nn的输出
ê
与调整参量ur一同计算,该调整参量是补偿环节k(s)的输出参量。按照图2,因为基于fss的应用,可以将内燃机1的有限数量的不同的测量特性参量考虑为nn的干扰参量ds或输入参量x(t),所以各个输入参量x(t)可以具有特别是动态的时间特性。按照这种方式和方法,引入到nn中的振荡可以传播直至nn的输出参量
ê
并且将整个λ调节3激励成振荡。为了抵消这种效应,在按照本发明的方法的一种实施形式中,可以在数学上平滑至少一个输入参量x(t)或输出参量。可以由nn的人类用户来选择应该被平滑的输入参量x(t)以及选择平滑的数学方法。
[0059]
按照本发明的方法可以在没有附加需要的外围设备的情况下集成到车辆4的内燃机1的现有控制器2中,并且与所述控制器相适配。在一种实施形式中,在现有的内燃机1的常规的λ调节中应用可变的区段时间常数,在这种实施形式中,按照本发明的方法可以以有利的方式和方法预告和相应地影响调节偏差e的一个或多个时间步长。
[0060]
实施例
[0061]
本发明的另外的特征、应用可能性和优点由对本发明的实施例的以下说明参考示意性示出的附图得出。图中:
[0062]
图5示出内燃机的λ调节。
[0063]
在图5中示出内燃机1的按照本发明的λ调节3的结构构造。在该实施例中,内燃机1是汽油发动机。调节参量在此是λ实际值λ
ist
,而理论值是作为第一输入参量输入到λ调节3中的λ理论值λ
soll
。调节偏差e由λ理论值λ
soll
与λ实际值λ
ist
的差形成并且被引导到补偿环节k(s)中。设置补偿环节k(s),以便实施计算,以便产生控制器2的常规的调节器调整值fr。在补偿环节k(s)中实施的计算的方式和方法对于实施按照本发明的方法而言是不重要的,并且可以满足任何已知的或单独创建的结构,以及处理任意数量的另外的输入参量。另外的输入参量构成干扰参量ds,所述干扰参量包括用于nn的输入参量xn的特定选择。按照本发明有利地借助于按照图2的fss来识别干扰参量ds。在表1中说明用于所选择的内燃机1的干扰参量ds的示例性的选择。在此,示例性地涉及具有两个气缸底座的v型结构型式的汽油发动机,其中按照本发明的方法示例性地应用于第一气缸底座(底座1)和为此连通的废气排出管路。在此,fss已识别29个测量特性参量作为输入参量xn。为了更好地理解,这些输入参量按照表1的第1栏命名,按照第2栏划分为各功能技术组。
[0064]
[0065][0066]
表1
[0067]
λ调节器输出是常规的调节器调整值fr。所述调节器调整值为λ调节3的一部分,并且在此根据所述调节器调整值对三通催化器的功能影响将所述调节器调整值配置给废气设备的组。λ调节偏差e同样是λ调节3的一部分。废气设备组的另一个测量特性参量被称为第一气缸底座的废气体积流的梯度。在发动机增压的组中,按照本发明通过fss识别一个测量特性参量:废气涡轮增压器调整器的相对冲程作为实际值。对于喷射系统的组,识别出5个测量特性参量。这些测量特性参量在此包括:在共轨系统的轨道之内的在数学上过滤的压力作为实际值、第一气缸底座的当前进气阀的位置作为实际值、第一气缸底座的排气凸轮轴的相位调整器位置作为理论值、相对燃料量以及相对燃料量的修正,该修正按照图5可以是所述修正因数f
kor
中的一个修正因数。
[0068]
对于空气路径的组,选择出11个测量特性参量。这些测量特性参量在此包括:在节气门之前的压力、当前的节气门位置、曲轴箱中的空气压力、通过第一气缸底座的节气门的吸入空气的预测的质量流、建模和在数学上过滤最小和最大的吸气管压力、吸气管压力的梯度作为理论值、节气门平衡的在数学上的积分器、第一气缸底座的辅助填充信号的质量流的修正因数、用于两个气缸底座的在节气门之前的吸气空气温度。
[0069]
按照图2的fss方法此外选择出燃料箱系统的如下测量特性参量,所述测量特性参量包括:通过燃料箱通风阀的质量流以及燃料箱通风的相对的空气-燃料混合物成分。
[0070]
对于汽油发动机的燃烧的组,选择7个测量特性参量,所述测量特性参量包括:在当前的运行状态中的最大允许的增压压力、期望的燃烧响度、用于补偿预控计算的转矩的
值、定义当前的气缸抑制的降低级作为实际值、燃烧室中的废气再循环(agr)的惰性气体的部分压力作为理论值、在最大允许的吸气管压力下的充气作为理论值以及气缸关闭。
[0071]
此外,将测量特性参量因此识别为重要的干扰参量ds,所述干扰参量乍一看似乎不直接影响λ调节3的计算,然而在所选择的汽油发动机的控制器2的分支的计算和功能结构之内对λ调节3具有定量的影响。总共选择出这29个测量特性参量作为nn的输入参量xn。nn包括按照图3的原理上的结构并且具有以下描述的超参数。使用29个输入参量x1(t)、
…
、x
29
(t)的时间变化曲线x(t)作为输入参量。控制器在10ms的时间网格中实施λ调节的计算。按照本发明有利地,附加地考虑最后两个时间步长x1(t-1)、
…
、x
29
(t-1)以及x1(t-2)、
…
、x
29
(t-2)的值,与此相应地考虑最后-10ms以及最后-20ms,从而得出输入层的维度为87。相应地得出输入层的输入为x1,
…
,x
87
。
[0072]
将按照这种方式产生的输入层应用到nn,该nn优选是根据图3的构造。人类用户负责选择隐藏层的数量以及神经元的数量,由此隐含地给出权重和阈值的参数。对于本领域技术人员来说,用于产生nn的处理方法通常是已知的。
[0073]
按照图5,现在以如下方式应用按照本发明的nn,即,该nn计算预测调节偏差
ê
,将所述调节偏差加到调节器调整值fr上,由此产生系统修正因数亦或nn调整值f
nn
。按照图4,在通过rl的应用的准备阶段中这样优化nn,以预测未来的时间步长的λ调节偏差e并且由此确定预测调节偏差
ê
的值,所述值如下影响λ调节3,使得未来的λ调节偏差e等于0。此外,现在通过nn计算出的nn调整值f
nn
与各种修正因数f
kor
相乘或相加,这些修正因数对于所使用的内燃机1的所使用的控制器2来说是软件特定的。在此,这些因数f
kor
中的一个因数是相对空气量r
l
,所述相对空气量在计算中是没有单位的,从而由nn调整值f
nn
、修正因子f
kor
以及相对空气量r
l
的乘法得出相对燃料量rk,所述相对燃料量用作调节段g(s)的输入参量并且按照图1继续计算λ调节。
[0074]
与常规应用相比,按照本发明的方法以有利的方式和方法具有更好的调节器性能。对于从相对空气量为r
l
=1开始、到例如初始负载的约20%的负载突变的示例,在常规的λ调节3中可以预期,在负载突变开始时,λ实际值λr首先漂移到高值范围中,以及接着通过调节器调整值fr的适度的干预超调到低值范围中,并且开始振荡。这在接着的变化曲线中导致,λ实际值λr首先相对于为1的理论值λ
soll
而言过高,而在超调的持续不断的动态过程中过低。可以假设,常规的调节器无法足够快速地跟随这种负载突变的动态性,由此,调节器干预受限,而无法发挥期望的作用。而按照本发明的方法在负载突变开始时通过nn调整值f
nn
实施明显增强的调节器干预,所述调节器干预的强度在调节的持续时间上持续。增强的干预导致λ实际值λ
nn
的高频振荡,然而该振荡在整个变化曲线上仅呈现与λ理论值λ
soll
的较小的偏差。此外,(利用nn调整值f
nn
的当量的)调节器干预的定性的变化曲线对应于常规λ调节3的λ实际值λr在时间上偏移的定性的变化曲线。按照本发明的方法因而按照本发明有利地预测常规的λ调节3的未来的调节偏差e并且主动地相反控制该调节偏差,而不仅仅对其做出反应。
[0075]
这在质量评价标准的定量评价中导致,在内燃机1的具有恒定的负载以及化学计量的λ为1的运行点中,紧邻负载突变之前,氧气量m
o2
的偏差相应地接近0。通常,在应用按照本发明的方法的情况下,不会与该状态形成实质的变化,并且因此不会发生与三通催化器的最优的氧气加载的显著的偏差。而常规的λ调节3在负载突变开始时首先具有最优的氧气
量m
o2
的小的负偏差,首先通过调节器干预和气体动力学又补偿所述小的负偏差。通过在高值范围中对λ实际值λr的然而现有的超调,在三通催化器中的能利用的氧气成分在接着的时间变化曲线中被更多地耗散,这导致与最优的氧气量m
o2
的负偏差的增加。该偏差甚至具有这样高的值,使得即使超调到低值区域中也还不导致三通催化器中的氧再生。更确切地说,通过常规的调节器干预更缓慢地调整与最优的相对氧气量m
o2
的偏差。
[0076]
附图标记列表
[0077]
1内燃机
[0078]
2控制器
[0079]
3调节系统/λ调节
[0080]
4、17车辆
[0081]
5测量数据
[0082]
6外部处理单元
[0083]
7数据结构
[0084]
8用户
[0085]
9数据过滤器
[0086]
10相关过滤器
[0087]
11缩放过滤器
[0088]
12特性参量选择过滤器
[0089]
13数据库
[0090]
14干扰参量矩阵
[0091]
15过滤器矩阵
[0092]
18测量数据
[0093]
19质量评价标准
[0094]
20新训练的nn
[0095]
agr废气再循环
[0096]
co一氧化碳
[0097]
d干扰
[0098]ds
干扰参量
[0099]
e调节偏差
[0100]
ê
预测调节偏差
[0101]
fa隐藏层的激活函数
[0102]
fe输出层的激活函数
[0103]fkor
修正因数
[0104]fnn
系统修正因数
[0105]fr
调节器调整值
[0106]
fss特征子系统选择
[0107]
g(s)调节段
[0108]gyd
(s)干扰段
[0109]
hc碳氢化合物
[0110]
隐藏层的阈值
[0111]
imc内模控制
[0112]
k隐藏层的数量
[0113]
k(s)补偿环节
[0114]
l
o2
相对填充度
[0115]
m输入层的维度
[0116]
废气质量流
[0117]
mk第k层的神经元的数量
[0118]mo2
氧气量
[0119]
n输入参量的数量
[0120]
nn神经网络
[0121]
nox氮氧化物
[0122]
np加权的nn的数量
[0123]
r计算操作
[0124]rk
相对燃料量
[0125]rl
相对空气量
[0126]
rl强化学习
[0127]
t时间
[0128]
tr计算时间
[0129]ukor
经修正的调整参量
[0130]unn
nn调整参量
[0131]
ur调节器调整参量
[0132]
vi输出层的权重
[0133]
w理论值
[0134]
隐藏层的权重
[0135]
xn输入参量
[0136]
y调节参量
[0137]
神经元
[0138]
θ输出层的阈值
[0139]
λ
ein
输送给λ废气催化器的废气
[0140]
λ
ist
、λr、λ
nn
λ实际值
[0141]
λ
soll
λ理论值
[0142]
s01,s06集成到控制器中
[0143]
s02实施测量行驶
[0144]
s03评价测量数据
[0145]
s04结束rl
[0146]
s05训练nn
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1