混合动力车辆的发动机失火检测装置的制作方法
1.本发明涉及混合动力车辆的发动机失火检测装置,更详细地说,涉及具有发电专用的内燃机的混合动力车辆的发动机失火检测装置。
背景技术:
2.在专利文献1中公开了内燃机的失火判定装置。该内燃机搭载在动力分配方式的混合动力车辆上。而且,内燃机经由扭振减振器与后级(主要是动力分配机构和两个电动发电机(mg1和mg2))连接。在发动机运转状态不属于包含减振器的后级的共振区域时,失火判定装置通过通常时失火检测处理(第1方法)来判定失火。另一方面,在发动机运转状态属于包含减振器的后级的共振区域时,失火判定装置通过与通常时失火检测处理不同的共振区域失火检测处理(第2方法)来判定失火。该第1及第2方法都是基于发动机旋转变动的失火检测方法。
3.另外,在专利文献2中公开了以下技术:持续一定时间对所有气缸执行燃料切断,之后一边每次一个气缸地依次解除燃料切断,一边确定失火气缸。此外,在专利文献3中,公开了以下技术:为了准确且简单地进行发动机设备的动作确认,对电动发电机的输出进行反馈控制,以使以恒定的轴转矩使发动机旋转时的发动机的旋转速度为恒定。现有技术文献专利文献
4.专利文献1:日本特开2011-052698号公报专利文献2:日本特开2000-248989号公报专利文献3:日本特开2001-268711号公报
技术实现要素:
本发明要解决的问题
5.然而,在具备发电专用的内燃机的串联方式的混合动力车辆(增程式电动汽车也同样)中,已知有使扭振减振器介存于内燃机与发电机之间的构成。在这样的串联方式中,相比于内燃机与车辆行驶用电动机一起与车轮连接的方式(例如,专利文献1记载的动力分配方式或并联方式),相对于扭振减振器位于非发动机侧(即,发电机或电动机侧)的旋转元件的惯量变小。其结果是,根据在特定的一个气缸中发生连续失火时的发动机旋转速度,由于反共振点的影响,难以产生发动机旋转变动。因此,在搭载于串联方式的混合动力车辆上的发电专用的内燃机中,若采用以往的利用发动机旋转变动(曲轴的旋转变动)的方法,可能会产生难以适当地检测连续失火的状况。因此,寻求失火检测方法的改善。
6.本发明是鉴于上述问题而完成的,其目的在于提供一种能够提高搭载在混合动力车辆上的发电专用的内燃机的连续失火的检测精度的发动机失火检测装置。用于解决问题的手段
7.本发明所涉及的混合动力车辆的发动机失火检测装置搭载于具备内燃机和发电
机的混合动力车辆。内燃机具有多个气缸和曲轴,是发电专用的。发电机经由扭振减振器与曲轴连接。发动机失火检测装置具备发电机旋转角传感器和处理器。发电机旋转角传感器检测发电机旋转轴的旋转角。处理器执行检测内燃机的失火的失火检测处理。失火检测处理包含第1失火检测处理,在所述第1失火检测处理中,在与发电机旋转轴的旋转速度的振幅的大小相关且使用发电机旋转角传感器检测到的振幅相关值大于判定阈值的情况下,判定为内燃机发生了失火。
8.发动机失火检测装置还可以具备曲轴转角传感器。失火检测处理也可以包含第2失火检测处理,在所述第2失火检测处理中,基于使用曲轴转角传感器检测到的曲轴的旋转变动来检测内燃机的失火。处理器也可以在与使用曲轴转角传感器检测到的曲轴的旋转速度对应的发动机旋转频率的二分之一的频率值为特定频率值以下的情况下,选择第1失火检测处理。并且,处理器也可以在上述二分之一的频率值大于特定频率值的情况下,选择第2失火检测处理。特定频率值是以下情况时的频率的值,即:曲轴的旋转角位移相对于内燃机的转矩的比即传递函数的增益与发电机旋转轴的旋转角位移相对于内燃机的转矩的比即传递函数的增益相等时。
9.处理器也可以在上述二分之一的频率值为特定频率值以下且使内燃机的点火正时比最佳点火正时滞后的发动机运转条件下,选择第1失火检测处理。
10.处理器也可以在内燃机刚刚冷启动之后的快速空转时,执行第1失火检测处理。
11.振幅相关值也可以是发电机旋转轴的旋转速度的全振幅的大小。发明的效果
12.在相对于扭振减振器位于发电机侧的旋转元件的惯量较小的串联方式的混合动力车辆(增程式电动汽车也同样)中,在特定的一个气缸中发生连续失火时,由于扭振减振器的共振的影响,存在相比于曲轴的旋转变动更容易产生发电机旋转轴的旋转变动的发动机旋转速度区域(例如对应于后述的图10所示的低频带b1)。根据本发明所涉及的第1失火检测处理,在与发电机旋转轴的旋转速度的振幅的大小相关的振幅相关值大于判定阈值的情况下,判定为在内燃机中发生了失火。根据这样的方法,在上述发动机旋转速度区域的使用中,能够以简单的方法提高连续失火的检测精度。
附图说明
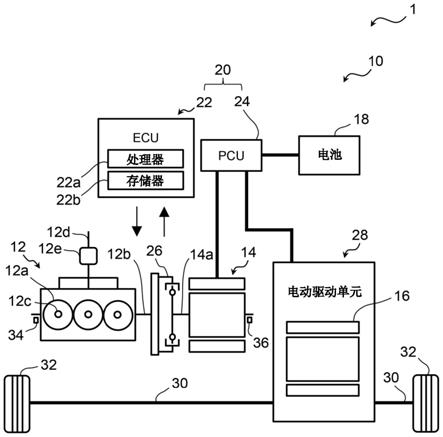
13.图1是示出本发明的实施方式1所涉及的混合动力车辆的构成的一例的示意图。图2是示出旋转变动指标值与惯量比r的关系的曲线图。图3是将图1所示的串联混合动力车辆的动力传递系统p模型化而示出的图。图4是用于在混合动力车辆x与图1所示的串联混合动力车辆之间进行比较的同时说明旋转变动指标值与频率f的关系的曲线图。图5是用于说明未发生失火的情况下的发动机旋转速度ne以及mg旋转速度nmg的波形的时序图。图6是用于说明在特定的一个气缸中发生连续失火的情况下的发动机旋转速度ne以及mg旋转速度nmg的波形的时序图。图7是表示混合动力车辆x和图1所示的串联混合动力车辆之间的连续失火时的能量比例的差异的图。
图8是用于说明发生随机失火的情况下的发动机旋转速度ne以及mg旋转速度nmg的波形的时序图。图9是示出实施方式1所涉及的失火检测处理a的流程的流程图。图10是用于说明本发明的实施方式2所涉及的失火检测处理的选择方法的曲线图。图11是示出实施方式2所涉及的失火检测处理的流程的流程图。
具体实施方式
14.在以下说明的各实施方式中,在提及各要素的个数、数量、量、范围等的情况下,除了特别明示的情况或原理上明确地确定为该数量的情况以外,本发明不限于其所提及的数量。
15.1.实施方式11-1.混合动力车辆的构成图1是示出实施方式1所涉及的混合动力车辆1的构成的一例的示意图。更具体地,图1示出了包括混合动力车辆1所具备的动力传动系统10。动力传动系统10包括内燃机12、第1电动发电机(第1mg)14、第2电动发电机(第2mg)16、电池18和控制装置20。
16.第1mg 14以及第2mg 16例如是三相交流型电动发电机。电池18蓄积向第1mg 14以及第2mg 16供给的电力。控制装置20控制内燃机12、第1mg 14和第2mg 16。控制装置20包括电子控制单元(ecu)22和电力控制单元(pcu)24。pcu 24是包括用于驱动第1mg 14和第2mg 16的变换器的电力转换装置,并且pcu 24基于来自ecu 22的命令控制第1mg 14和第2mg 16。
17.内燃机12作为一例是火花点火式发动机。内燃机12具有多个(作为一例,3个)气缸12a(第1~第3气缸#1~#3)和曲轴12b。曲轴12b由三个气缸12a共用。曲轴12b经由扭振减振器26与第1mg 14的旋转轴14a连结。另外,内燃机12具有点火装置12c(仅图示配置在各气缸12a中的火花塞)。ecu 22能够通过控制点火装置12c来变更点火正时。进一步地,在内燃机12的排气通路12d中配置有排气净化催化剂12e。
18.第1mg 14主要作为发电机发挥功能。具体而言,第1mg 14使用内燃机12的动力发电。因此,第1mg 14及其旋转轴14a分别相当于本发明所涉及的“发电机”及“发电机旋转轴”的一例。pcu 24将由第1mg 14生成的电力从交流转换为直流,并蓄积在电池18中。其结果是,电池18被充电。此外,第1mg 14在发动机启动时作为电动机发挥功能。具体而言,pcu 24将蓄积在电池18中的电力从直流转换为交流电力,并供给至第1mg 14,由第1mg 14执行内燃机12的起转。但是,本发明所涉及的“发电机”也可以仅具有作为利用内燃机12的动力的发电机的功能。
19.第2mg 16与差速齿轮等齿轮类(省略图示)一起收容在电动驱动单元28中。第2mg 16主要作为驱动混合动力车辆1的电动机发挥功能。具体而言,pcu 24将蓄积在电池18中的电力从直流变换为交流并供给到第2mg 16,第2mg 16产生用于驱动驱动轴30及与驱动轴30连接的车轮32的转矩。其结果是,混合动力车辆1(车轮32)被驱动。
20.如上所述,内燃机12与第1mg 14连结,但不与驱动轴30连结。即,内燃机12是发电专用发动机,为了进行发电而启动。另外,不仅内燃机12不与驱动轴30连结,第1mg 14也不
与驱动轴30连结。
21.ecu 22具有处理器22a和存储器22b。存储器22b中存储有包括用于内燃机12、第1mg 14以及第2mg 16的各种处理和控制的映射的各种数据以及各种控制程序。通过由处理器22a从存储器22b读取控制程序并执行,实现控制装置20的各种处理以及控制。另外,控制装置20也可以使用多个ecu构成。具体而言,例如,控制装置20也可以分别具备综合控制动力传动系统10的ecu、控制内燃机12的ecu、控制第1mg 14的ecu以及控制第2mg 16的ecu。
22.控制器20(ecu 22)还从用于控制动力传动系统10的动作的传感器组接收传感器信号。传感器组包括检测曲轴12b的旋转角(曲轴转角)的曲轴转角传感器34和检测第1mg 14的旋转轴14a的旋转角的旋转变压器(发电机旋转角传感器)36。处理器22a能够根据曲轴转角传感器34的信号计算发动机旋转速度ne,另外,处理器22a能够根据旋转变压器36的信号计算旋转轴14a的旋转速度(以下称为“mg旋转速度nmg”)。
23.搭载有动力传动系统10的混合动力车辆1是所谓的串联方式的混合动力车辆。另外,作为本发明的应用对象的混合动力车辆也可以是对动力传动系统10增加了外部充电功能的串联方式的插电式混合动力车辆。进一步地,作为本发明的应用对象的车辆也可以是所谓的增程式电动汽车(range extended electric vehicle)。例如,可以通过在利用图1所示的动力传动系统10的基本构成的同时添加外部充电功能并提高电池18的容量,来构成这种增程式电动汽车。
24.1-2.失火检测处理图1所示的ecu 22所具备的处理器22a相当于本发明所涉及的“发动机失火检测装置所具备的处理器”的一例。处理器22a执行用于检测内燃机12的失火的失火检测处理。在本实施方式中,作为失火检测处理,执行相当于本发明所涉及的“第1失火检测处理”的一例的后述的“失火检测处理a”。
25.内燃机12中产生的失火的模式包括:特定的一个气缸跨及多个循环连续地失火的“连续失火”、和以多个气缸为对象而非连续地且随机地失火的“随机失火”。以下说明的失火检测处理a在搭载于串联方式的混合动力车辆1上的发电专用的内燃机12的连续失火的检测中具有较高的失火检测性。但是,该失火检测处理a也可以用于随机失火的检测。
26.1-2-1.与串联混合动力车辆中的连续失火的检测相关的问题在串联方式的混合动力车辆(以下也简称为“串联混合动力车辆”)1中,相比于其他方式(例如动力分配方式或并联方式)的混合动力车辆,相对于扭振减振器26位于非发动机侧(即第1mg 14侧)的旋转元件的惯量img变小。振动模式由于这些方式的不同而变化。其结果是,根据发生连续失火时的发动机旋转速度ne,由于从内燃机12经由扭振减振器26到达第1mg 14的动力传递系统p(参照后述的图3)的反共振点的影响,难以产生发动机旋转变动(即,曲轴12b的旋转变动)。因此,在搭载于串联混合动力车辆1的发电专用的内燃机12中,若采用利用了发动机旋转变动的一般方法,可能会产生难以适当地检测连续失火的状况。因此,寻求失火检测方法的改善。
27.接着,对混合动力车辆x和串联混合动力车辆1进行比较并详细说明上述问题及由此得到的见解。混合动力车辆x是上述其他方式的混合动力车辆的一例,是专利文献1所记载那样的动力分配方式。另外,作为显著地产生上述问题的发动机运转条件的例子,有伴随点火正时的滞后角(目的例如是催化剂预热)的快速空转条件。因此,以下对上述问题的详
细说明主要涉及伴随这样的催化剂预热的快速空转条件而进行。另外,快速空转是指在发动机冷却水温度小于规定值时进行的冷启动之后立即提高空旋转速度度的同时进行的发动机运转(发动机预热运转)。而且,根据在快速空转中进行的点火正时的滞后,例如为了促进排气净化催化剂12e的预热而使点火正时相比于最佳点火正时mbt(minimum advance for the best torque)滞后。
28.在没有发生失火的情况下,在曲轴12b的2次旋转中,在各气缸12a中产生一次燃烧。与此相对,在特定的一个气缸中发生连续失火的情况下,以曲轴12b的2次旋转中发生一次的周期发生失火。其结果是,由该连续失火的影响而产生的发动机转矩te的周期性的变动成分(即,发动机旋转速度ne的0.5次频率的转矩变动成分)被输入到扭振减振器26。由这样的连续失火引起的转矩变动成分受到动力传递系统p的共振的影响,会对第1mg 14的旋转轴14a的旋转变动产生影响。
29.图2是表示旋转变动指标值与惯量比r的关系的曲线图。图2所示的关系是基于动力传递系统(内燃机、扭振减振器以及比扭振减振器靠后级的构成要素)的规格而确定的。另外,图2中的“发动机侧”表示相对于扭振减振器的、发动机侧的旋转元件(即,主要是曲轴和飞轮)。另外,“mg侧”表示相对于扭振减振器的、非发动机侧的旋转元件(在混合动力车辆x中,上述的后级的旋转元件与其相当,在串联混合动力车辆1中,第1mg 14的旋转轴14a与其相当)。
30.图2示出伴随催化剂预热的快速空转条件(作为发动机旋转速度ne,例如为1300rpm)下的关系。图2的纵轴的20log
10
(mag)以分贝表示发动机侧/mg侧的旋转角位移(输出)相对于发动机转矩te(输入)的比、即传递函数的增益,以下,为了方便,也称为“旋转变动指标值”。稍后将参考图3描述该传递函数的具体示例。该旋转变动指标值表示,该值越大,则在接收到由连续失火引起的发动机转矩te的输入(即,变动成分的输入)时,由于扭振减振器的扭转共振的影响,越容易产生旋转变动(换言之,旋转速度ne或nmg的振幅越大)。旋转速度ne或nmg的振幅大这一点,在高精度地进行利用旋转变动的失火检测方面是优选的。因此,如图2所示,旋转变动指标值越大,失火检测性越好。
31.图2的横轴的惯量比r相当于“mg侧”的旋转元件的惯量img相对于“发动机侧”的旋转元件的惯量ieng的比。在图2所示的例子中,在惯量比r为规定值r1的情况下,发动机侧和mg侧的旋转变动指标值相交。而且,在低于规定值r1的低惯量比范围内,mg侧的旋转变动指标值超过发动机侧的旋转变动指标值。因此认为,在该低惯量比范围内,通过利用mg侧的旋转变动,能够确保较高的失火检测性。另一方面,在比规定值r1高的高惯量比范围内,发动机侧的旋转变动指标值超过mg侧的旋转变动指标值。因此,可以说在该高惯量比范围内,通过利用发动机侧的旋转变动,能够确保高的失火检测性。
32.如上述说明所示,在串联混合动力车辆1中,非发动机侧(mg侧)的惯量img较小。因此,串联混合动力车辆1的惯量比r取0.26等属于低惯量比范围的值。这不限于串联混合动力车辆1的例子,而可以说是全体串联混合动力车辆。另一方面,在动力分配方式的混合动力车辆x(并联方式也相同)中,惯量img取与发动机侧的惯量ieng接近的值,因此,其惯量比r取0.74等属于高惯量比范围的值。
33.从上述图2所示的关系可知,在伴随催化剂预热的快速空转条件下,通过利用mg侧的旋转变动,能够提高搭载于串联混合动力车辆1的内燃机12的连续失火的检测性。
34.图3是将串联混合动力车辆1的动力传递系统p模型化而示出的图。在图3中,与内燃机12以及第1mg 14一起,介于它们之间的扭振减振器26由弹簧元件以及阻尼元件表示。图3中,ieng和img分别是发动机侧和mg侧的旋转元件的惯量,te是发动机转矩。θeng是曲轴转角,θmg是第1mg 14的旋转轴14a的旋转角。k是弹簧元件的弹簧常数,c是阻尼元件的阻尼系数,例如取k/1000的值。
35.发动机侧的旋转元件的运动方程式和mg侧的旋转元件的运动方程式可以分别表示为下式(1)和式(2)。通过对式(1)以及式(2)实施拉普拉斯变换,可以分别得到式(3)及式(4)。式(3)表示示出发动机侧的旋转角位移xeng(输出)相对于发动机转矩te(输入)的关系的传递函数。式(4)表示示出mg侧的旋转角位移xmg(输出)相对于发动机转矩te(输入)的关系的传递函数。在图2及后述的图4的(a)、图4的(b)及图10中,使用这样计算出的传递函数。【算式1】【算式1】【算式1】【算式1】
36.接着,图4的(a)和图4的(b)是用于在混合动力车辆x与串联混合动力车辆1之间进行比较的同时说明旋转变动指标值与频率f的关系的曲线图。图4的(a)和图4的(b)所示的关系与上述图2所示的关系相同,是基于动力传递系统(内燃机、扭振减振器、以及比扭振减振器靠后级的构成要素)的规格而确定的。另外,在各图中,示出了扭振减振器(更详细而言,动力传递系统)的共振点和反共振点。进一步地,各图所示的频率值fne1表示与1300rpm对应的发动机旋转频率fne的0.5次的频率值(即,发动机旋转频率fne的二分之一的频率值)即10.8hz。该1300rpm是伴随催化剂预热的快速空转条件下的发动机旋转速度ne(曲轴12b的旋转速度)的值的一例。
37.图4的(a)示出与用于比较的混合动力车辆x相关的旋转变动的频率特性。在扭振减振器的后级侧(mg侧)的惯量img比串联混合动力车辆1的惯量大的混合动力车辆x中,快速空转时的发动机旋转频率值fne1位于比共振点(9.4hz)靠高频侧的位置。而且,在该发动机旋转频率值fne1下,发动机侧的旋转变动指标值超过mg侧的旋转变动指标值。因此,如果是混合动力车辆x的快速空转时,则可以说使用利用发动机侧的旋转变动的公知的失火检测方法是妥当的。
38.另一方面,在mg侧的惯量img远远小于混合动力车辆x的惯量的串联混合动力车辆1中,如图4的(b)所示,共振点移动到比车辆x的共振点更靠高频侧的位置。其结果是,发动机旋转频率fne1位于比共振点(13.4hz)更靠低频侧的位置,且接近位于比共振点更靠低频率侧的位置的反共振点。并且,在发动机旋转频率fne1下,发动机侧的旋转变动指标值比混合动力车辆x的旋转变动指标值小。因此,难以产生发动机侧的旋转变动。因此,可知在串联混合动力车辆1的快速空转时,利用了发动机旋转变动的一般的失火检测方法的利用不适当。另一方面,可知在发动机旋转频率fne1下,容易产生mg侧的旋转变动。
39.1-2-2.发动机旋转速度以及mg旋转速度的波形接着,图5是用于说明未发生失火时的发动机旋转速度ne和mg旋转速度nmg的波形的时序图。图6是用于说明在特定的一个气缸中发生连续失火的情况下的发动机旋转速度ne以及mg旋转速度nmg的波形的时序图。在这些图中,为了比较而参照的与混合动力车辆x相关的波形用细实线示出,与本实施方式的串联混合动力车辆1相关的波形用粗实线示出。另外,在这些图中,表示出伴随催化剂预热的快速空转时的波形,发动机旋转速度ne以固定值(作为一例为1300rpm)为中心推移。
40.首先,如图5所示,在未发生失火的情况下,在一个循环中以第1气缸#1、第2气缸#2和第三气缸#3的顺序产生燃烧转矩(发动机转矩te)。发动机旋转速度ne与该燃烧转矩的变化联动地变动。另外,在不发生失火的情况下,串联混合动力车辆1中的发动机旋转速度ne与混合动力车辆x的发动机旋转速度同样地变动。另一方面,mg旋转速度nmg在两者之间存在差异。具体而言,从发动机侧向mg侧输入的转矩因扭振减振器的存在而被减弱,但惯量img相对较小的串联混合动力车辆1的mg旋转速度nmg的波形与混合动力车辆x的波形相比以高频率变动。
41.接着,在图6所示的例子中,在特定的气缸(第3气缸#3)中发生连续失火。在混合动力车辆x中,如参照图4说明的那样,在快速空转时,发动机侧的旋转变动(即,发动机旋转速度ne的变动)比mg侧的旋转变动更容易产生。具体而言,当发生失火时,如图6中的附加箭头a所示,发动机旋转速度ne不上升,并且,此后,如附加箭头b所示,发动机旋转速度ne大幅降低。这是因为,在惯量img比串联混合动力车辆1大的混合动力车辆x中,如果由于失火而使得燃烧转矩消失,则发动机旋转速度ne就会容易下降。其结果是,如附加标记c所示,伴随连续失火的发生的发动机旋转速度ne的振幅会变大。因此,在混合动力车辆x中,能够通过在伴随催化剂预热的快速空转时利用发动机旋转变动的一般方法确保失火检测性。
42.另一方面,在串联混合动力车辆1中,mg侧的惯量img小,因此如附加箭头d所示,即使发生失火,发动机旋转速度ne也难以下降。其结果是,伴随连续失火的发生的发动机旋转速度ne的振幅比混合动力车辆x的振幅小。另一方面,从图6可知,不同于与没有失火的情况相比无较大差异的混合动力车辆x,串联混合动力车辆1的mg旋转速度nmg大幅变动。另外,在图6所示的连续失火时的例子中,mg旋转速度nmg受到扭振减振器的共振(更详细而言是动力传递系统)的影响而变动。因此,如图6所示,共振频率(例如13.4hz)相对较高的串联混合动力车辆1的波形的mg旋转速度nmg的周期比共振频率(例如9.4hz)相对较低的混合动力车辆x的波形的mg旋转速度nmg的周期短。
43.接着,参照图7的(a)和图7的(b),对基于能量的观点的连续失火时的振动模式的解析结果进行补充说明。图7的(a)和图7的(b)是表示混合动力车辆x和串联混合动力车辆1之间的连续失火时的能量比例的差异的图。图7所示的能量比例的计算结果是基于与图6所示的内容相同的试验数据而得的。从内燃机12输出的转矩(即,发动机转矩te)被转换为发动机侧和mg侧的动能以及扭振减振器的应变能。
44.比较图7的(a)和图7的(b)可知,扭振减振器的应变能的比例相同。另一方面,关于动能,在串联混合动力车辆1中,与混合动力车辆x相比,mg侧的动能的比例明显大于发动机侧的动能的比例。这表示在串联混合动力车辆1中,在发生连续失火时,难以产生发动机侧的旋转变动,另一方面,容易产生mg侧的旋转变动。
45.1-2-3.失火检测处理a的概要鉴于上述问题和见解,在本实施方式中,为了进行内燃机12的失火检测,执行利用了mg侧的旋转变动的失火检测处理a。具体而言,在失火检测处理a中,在“振幅相关值”大于规定的判定阈值的情况下,处理器22a判定为在内燃机12中发生了失火。
46.这里所说的振幅相关值是指与mg旋转速度nmg的振幅大小相关的值。在本实施方式中使用的振幅相关值的具体例例如是在图6中附加标记e示出的全振幅。另外,振幅相关值例如也可以是在该图中附加标记f1及f2示出的振幅(单振幅(换言之,最大值与平均值之差、或者平均值与最小值之差))中的一方。这样的振幅相关值例如可以使用旋转变压器36的输出信号来计算。
47.另外,失火检测本身基本上在内燃机12的运转期间始终执行。上述说明是以伴随催化剂预热的快速空转条件为中心、以连续失火为对象进行的。但是,在本实施方式中,作为一例,不仅是该快速空转条件下的失火检测,在发动机运转期间进行的所有的失火检测也使用失火检测处理a来执行。
48.更具体而言,在本实施方式中,不论在发动机运转期间使用的发动机旋转速度ne如何(换言之,不论发动机旋转频率fne的0.5次的频率值如何),都执行失火检测处理a。另外,能够通过失火检测处理a检测出的失火的模式不限于图6所示那样相对于mg旋转速度nmg反映出上述共振的影响的连续失火。即,失火检测处理a例如也可以用于参照下面的图8说明的随机失火的检测。
49.图8是用于说明发生随机失火的情况下的发动机旋转速度ne和mg旋转速度nmg的波形的时序图。在该图中,为了比较而参照的与混合动力车辆x相关的波形用细实线示出,与本实施方式的串联混合动力车辆1相关的波形用粗实线示出。另外,在该图中,示出伴随催化剂预热的快速空转时的波形,发动机旋转速度ne在固定值(作为一例为1300rpm)附近推移。
50.在随机失火的例子中,如图8中的标注箭头g所示,伴随着失火的发生,发动机旋转速度ne也降低。但是,在单独地发生失火的随机失火的例子中,mg旋转速度nmg不受扭振减振器(更详细而言是动力传递系统)的共振的影响。因此,如该图中附加箭头h所示,在伴随着失火的产生而在mg侧产生了大的旋转变动之后,mg侧的旋转变动立即趋于收敛。在得到这样的mg旋转速度nmg的波形的随机失火的例子中,通过以规定曲轴转角期间(例如,与一个循环相当的720
°
ca)为对象而取得mg旋转速度nmg的振幅相关值(例如,全振幅的大小),也能够利用失火检测处理a进行随机失火的检测。
51.1-2-4.处理器进行的处理图9是示出实施方式1所涉及的失火检测处理a的流程的流程图。该流程图的处理在内燃机12的启动结束后的发动机运转期间反复执行。
52.在图9中,处理器22a首先在步骤s100中计算出mg旋转速度nmg的全振幅的大小。更具体而言,处理器22a根据在全振幅的大小(振幅相关值)的计算所需的规定曲轴转角期间(例如与一个循环相当的720
°
ca)中使用旋转变压器36检测出的mg旋转速度nmg的数据,计算全振幅的大小。此后,处理进行到步骤s102。
53.在步骤s102中,处理器22a判定在步骤s100中计算出的全振幅的大小是否大于规定的阈值th1。该阈值th1被事先确定为能够将发生了包含连续失火在内的各种模式的失火
时的全振幅的大小与未发生失火时的全振幅的大小区别开来的值。
54.在步骤s102中,在全振幅的大小为阈值th1以下的情况下,处理进入步骤s104。在步骤s104中,处理器22a判定为在内燃机12中未发生失火。
55.另一方面,在全振幅的大小大于阈值th1的情况下,处理进入步骤s106。在步骤s106中,处理器22a判定为在内燃机12中发生了失火。
56.1-3.效果如上述说明所示,根据用于mg侧的惯量img较小的串联混合动力车辆1的失火检测处理a,通过利用mg侧的旋转变动的振幅相关值,在使用mg侧的旋转变动比发动机侧的旋转变动更容易产生的低频带(参照图4的(b))的发动机运转条件(例如,伴随催化剂预热的快速空转条件)的情况下,能够以简单的方法提高连续失火的检测精度。
57.另外,在利用发动机侧的旋转变动的一般的失火检测方法中,为了提高连续失火的检测精度,有时为了获得排除了与发动机旋转速度ne叠加的扭振减振器的扭转振动成分后的发动机旋转速度ne而使用复杂的处理。与此相对,根据利用旋转角传感器(旋转变压器)36取得mg侧的旋转变动(振幅相关值)的失火检测处理a,能够直接检测伴随连续失火的发生而在动力传递系统p中产生的旋转变动。因此,能够不使用上述那样的复杂的处理而高精度地检测连续失火。
58.另外,在本实施方式所涉及的失火检测处理a中,利用mg旋转速度nmg的全振幅的大小作为振幅相关值。由此,与利用振幅(单振幅)的大小的例子相比,能够将更大的振幅相关值与判定阈值进行比较。因此,能够提高与由失火引起的mg旋转速度nmg的变动检测相关的s/n比,能够提高失火检测的精度。
59.另外,若如伴随催化剂预热的快速空转时那样,点火正时相对于最佳点火正时mbt滞后,则气缸12a内的燃烧会变得缓慢。因此,与使用最佳点火正时mbt时相比,难以产生发动机侧的旋转变动。因此,在伴随催化剂预热的快速空转时发生连续失火的情况下,发动机侧的旋转变动不仅由于参照图4的(b)说明的理由,还因点火正时的滞后的影响而难以产生。即,通过利用了发动机侧的旋转变动的一般的失火检测方法,显著地难以高精度地检测连续失火。与此相对,根据不利用发动机侧的旋转变动的失火检测处理a,能够有效地提高这种状况下的连续失火的检测性。另外,关于在伴随催化剂预热的快速空转时为了提高发动机侧的旋转变动的检测性而减少点火正时的滞后量这一操作,由于会延长催化剂预热所需的时间,因此会导致排气排放物(未燃烃hc)的排出量的增加。与此相对,通过利用失火检测处理a,不会导致这样的点火正时的滞后量的降低,能够确保连续失火的检测性。
60.2.实施方式2实施方式2除了通过以下说明的方法在内燃机12的运转期间变更失火检测处理这一点以外,与上述实施方式1相同。
61.2-1.失火检测处理图10是用于说明实施方式2所涉及的失火检测处理的选择方法的曲线图。图10示出与图4的(b)相同的关系。图10中的特定频率值fth相当于mg侧的旋转变动指标值(传递函数的增益)与发动机侧的旋转变动指标值相交(即相等)时的频率f的值。在比该特定频率值fth低的低频带b1中,mg侧的旋转变动比发动机侧的旋转变动容易产生。另一方面,在比频率值fth高的高频带b2中,发动机侧的旋转变动比mg侧的旋转变动容易产生。因此,为了兼
顾两个频带b1、b2双方中的高失火检测性,可以说优选在低频带b1中利用mg侧的旋转变动,在高频带b2中利用发动机侧的旋转变动。
62.因此,在本实施方式中,在发动机旋转频率fne的0.5次的频率值(即,发动机旋转频率fne的二分之一的频率值)为特定频率值fth以下的情况下,选择上述失火检测处理a。另一方面,在0.5次的频率值大于特定频率值fth的情况下,选择失火检测处理b。该失火检测处理b是基于使用曲轴转角传感器34检测出的曲轴12b的旋转变动来检测内燃机12的失火的处理(相当于本发明所涉及的“第2失火检测处理”的一例)。
63.2-2.处理器进行的处理图11是示出实施方式2所涉及的失火检测处理的流程的流程图。该流程图的处理在内燃机12的启动结束后的发动机运转期间反复执行。
64.在图11中,处理器22a首先在步骤s200中判定发动机旋转频率fne的0.5次的频率值(即,发动机旋转频率fne的二分之一的频率值)是否在特定频率值fth(参照图10)以下。0.5次的频率值使用曲轴转角传感器34的信号进行计算。
65.在步骤s200中,在0.5次的频率值为特定频率值fth以下的情况下,处理进入步骤s202。在步骤s202中,处理器22a选择利用mg侧的旋转变动的失火检测处理a。因此,处理器22a执行图9所示的流程图的处理。
66.另一方面,在步骤s200中,在0.5次的频率值大于特定频率值fth的情况下,处理进入步骤s204。在步骤s204中,处理器22a选择利用使用曲轴转角传感器34检测出的发动机侧的旋转变动的失火检测处理b。具体而言,作为失火检测处理b,只要是利用了发动机侧的旋转变动(发动机旋转速度ne的变动)的方法即可,能够使用公知的任意方法(例如,专利文献1中记载的方法)来实现。因此,在此省略对失火检测处理b的详细说明。
67.2-3.效果根据以上说明的实施方式2,在发动机旋转频率fne的0.5次的频率值(即,发动机旋转频率fne的二分之一的频率值)为特定频率值fth以下的情况下,选择利用mg侧的旋转变动的失火检测处理a,在0.5次的频率值大于特定频率值fth的情况下,选择利用发动机侧的旋转变动的失火检测处理b。由此,能够兼顾两个频带b1、b2(参照图10)双方中的高失火检测性。
68.3.其他实施方式(使用失火检测处理a的发动机运转条件的其他例子)利用mg侧的旋转变动的失火检测处理a(第1失火检测处理)不仅可以在快速空转条件下执行,还可以在0.5次的频率值(即,发动机旋转频率fne的二分之一的频率值)为特定频率值fth(参照图10)以下的其他发动机运转条件下,为了催化剂预热或其他目的而进行了点火正时相对于最佳点火正时mbt的滞后时执行。
69.另外,在惯量img较小的串联混合动力车辆的快速空转条件下,0.5次的频率值(上述二分之一的频率值)与串联混合动力车辆的规格无关地属于低频带b1(参照图10)。失火检测处理a也可以在不伴随因催化剂预热或其他目的而进行的点火正时相对于最佳点火正时mbt的滞后的快速空转时执行。
70.(与惯量比r对应的失火检测处理的选择例)在mg侧的旋转元件具有传动比的情况下,mg侧的惯量img受到该传动比(更具体而
言,传动比的平方)的影响。因此,在配置为能够改变该传动比的传动系统中,在内燃机12的运转期间,惯量img随着传动比的改变而改变,进而惯量比r(参照图2)改变。其结果是,在内燃机12的运转期间,根据惯量比r是比规定值r1(参照图2)低还是高,为了失火检测而使用mg侧的旋转变动和发动机侧的旋转变动中的哪一个是适当的可能会改变。因此,在具备具有这样的构成的动力传动系统的串联混合动力车辆中,发动机失火检测装置的处理器也可以配置为在内燃机的运转期间计算惯量比r。在此基础上,处理器也可以在惯量比r为规定值r1以下的情况下选择失火检测处理a(第1失火检测处理),在惯量比r比规定值r1高的情况下选择失火检测处理b(第2失火检测处理)。标号的说明
71.1 串联方式的混合动力车辆10 动力传动系统12 内燃机12a 气缸12b 曲轴12c 点火装置12e 排气净化催化剂14 第1电动发电机(发电机)14a 第1电动发电机的旋转轴(发电机旋转轴)16 第2电动发电机(电动机)18 电池20 控制装置22 电子控制单元(ecu)22a 处理器26 扭振减振器32 车轮34 曲轴转角传感器36 旋转变压器(发电机旋转角传感器)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1