一种风力发电机分数阶变桨控制方法
1.本发明属于风力发电系统控制技术领域,涉及到一种基于分数阶扩张状态观测器和分数阶积分滑模反步控制的风力机变桨控制方法。
背景技术:
2.由于风能清洁无污染,取之不尽用之不竭,已成为近年来最具竞争力的可再生能源。但由于风能能量密度低、随机性和不稳定性等特点,且风力发电机组是复杂多变量非线性不确定系统,因此风电机组的控制技术是系统安全高效运行的关键。随着风力发电机组的大型化以及风能渗透进电能市场的必然性,提高风能转换率和降低风力发电成本至关重要,高风速下风电机组的变桨控制已成为风力发电的关键技术之一。
3.滑模控制策略针对非线性和不确定系统具有较强的鲁棒性和抗干扰性等优点。同时,反步法可将复杂的非线性系统分解成不超过系统阶数的子系统,然后为每个子系统分别设计lyapunov函数和中间虚拟控制量,通过设计和修正虚拟控制律确保线性系统的稳定性。大量学者针对非线性系统中各种复杂问题,采用反步法与滑模控制相结合的方法解决。文献[储培,倪昆,程林,等.基于反步滑模的高超声速变体飞行器鲁棒控制[j].计算机仿真,2018,35(08):41-45]针对高超声速变体飞行器变体过程中的三通道姿态控制问题,首先采用凯恩方法建立高超声速变体飞行器姿态运动方程,然后基于反步法设计思想层层递推设计滑模控制律,实现姿态角的跟踪控制。文献[李众,沈炜皓.四旋翼姿态的反步滑模rbf网络自适应控制[j].火力与指挥控制,2020,45(11):146-150+157]针对外界存在常值干扰力矩和变值干扰力矩的四旋翼无人机姿态系统,提出一种将反步滑模控制和rbf网络自适应算法相结合的控制方法。此方法在反步滑模控制方法的基础上,利用rbf网络的逼近特性补偿外界干扰,由lyapunov方法构造rbf网络权值的自适应律,并通过lyapunov稳定性定理证明四旋翼无人机姿态系统的稳定性。仿真结果验证了反步滑模rbf网络自适应控制方法抑制干扰的能力相比于反步滑模控制更强。文献[蔡浩然,杨俊华,杨金明.直驱型波浪发电系统的混沌运动及反步滑模变控制[j].电测与仪表,2018,55(20):108-113+121]为研究直驱式波浪发电系统的混沌现象及混沌控制问题,采用反步法构造虚拟控制量,针对虚拟控制量设计滑模控制器,构造控制律进行混沌控制,提出反步滑模变控制方案。仿真结果表明,所设计反步滑模变控制器能使直线电机系统迅速脱离混沌状态。
[0004]
为了进一步提高控制精度,一些学者通过观测器进行辅助控制。文献[李华柏,谢永超,胡扬.双馈风力发电系统中变桨距线性自抗扰控制系统研究[j].河南科学,2021,39(02):190-195]将包含线性状态观测器的线性自抗扰控制器应用于风力发电系统中,仿真实验验证了线性自抗扰控制抗干扰能力强,对风速的不确定性具有较好的估计和补偿作用,同时能够实现发电系统的恒功率控制。文献[任丽娜,刘素,刘福才,等.基于模糊自抗扰的风电系统独立变桨距控制[j].动力工程学报,2018,38(07):564-571]为了降低风力机的不平衡负载,将自抗扰控制应用于独立变桨距降载控制中,并针对多个自抗扰控制器不便操作、参数调整困难的缺点,提出了基于模糊控制改进的自抗扰独立变桨控制,最后通过与
传统自抗扰独立变桨控制策略进行比较,验证了模糊自抗扰控制器的优越性。
[0005]
分数阶微积分理论提出至今已有三百多年,它是将传统的整数阶微积分算子用分数阶微积分算子替代,把整数阶微积分的阶次扩展到实数阶次,增强了控制系统的灵活性。文献[吴卫珍.基于分数阶微积分的风力发电机变桨距控制方法研究[j].无线互联科技,2012(05):103]针对含有较大时滞的风力发电机变桨距液压控制系统,基于分数阶微积分控制方法,设计了考虑时滞和相关鲁棒性的分数阶pid控制器。仿真结果表明,与整数阶pid控制器相比,该系统在分数阶pid控制器控制下整个闭环系统具备较好的动、静态性能,说明分数阶pid控制器控制性能的优越性。文献[李军,管萍.双馈风力发电机的分数阶滑模控制[j].北京信息科技大学学报(自然科学版),2018,33(03):66-71]针对不平衡电网电压条件下双馈风力发电机运行性能不佳的问题,将滑模控制与分数阶微积分结合起来构成分数阶滑模控制器,应用于不平衡电网条件下的双馈风力发电机直接功率控制中。仿真结果显示,所提出的控制策略实现了定子有功无功功率无波动以及定子电流平衡且正弦的控制目标。文献[管萍,李军.基于分数阶滑模的风力发电机直接功率控制[j].电机与控制应用,2018,45(09):97-102]为了改善双馈风力发电系统的控制性能,将分数阶滑模控制应用于双馈风力发电机的直接功率控制系统中。仿真与试验结果显示出所用分数阶滑模控制策略的有效性,同时表明该系统削弱了传统滑模控制中存在的抖振。
技术实现要素:
[0006]
由于风速的随机性、风电机组参数的时变性、系统的非线性以及时滞性,造成风电机组在额定风速以上时出现输出功率不稳定的问题。为改善系统在恒功率输出运行区域内的动态性能,本发明提出一种基于分数阶扩张状态观测器的风力机分数阶积分滑模反步变桨控制策略。首先结合积分滑模控制和反步法设计变桨距控制器,这样不但可以改善系统动态性能,保证系统的全局稳定性,而且能够避免传统反步设计方法计算复杂的问题。再针对积分滑模控制带来的抖振以及风力机系统中存在的内外扰动,设计扩张状态观测器减小抖振和内外扰动对系统造成的影响。然后将分数阶微积分理论与变桨控制器和观测器相结合,使得系统中可调参数增加,变得更加灵活,鲁棒性更强。
[0007]
鉴于此,本发明采用的技术方案是:一种风力发电机分数阶变桨控制方法,包括以下步骤:
[0008]
(1)建立机械液压混合传动型风力发电机系统模型。在建立风电系统模型时,为了在保证传动系统效率的同时降低故障率,本发明采用机械液压混合的方式进行传动,保证传动系统效率的同时降低了故障率。
[0009]
(2)结合积分滑模控制和反步法设计变桨距控制器,并将变桨控制器扩展到分数阶。该控制器既保证了风机在高风速下具有良好的稳定性,又避免了单独使用传统反步设计方法带来的计算过程复杂的问题,同时将变桨控制器扩展到分数阶,有效提高了控制器的灵活性。
[0010]
(3)由于积分滑模控制存在抖振且风电系统控制受到内外扰动的影响,为了进一步提高控制精度,有效降低抖振,设计分数阶扩张状态观测器,并定义一个附加状态变量用于表示系统内外部扰动,对系统所有状态变量进行观测和补偿。
[0011]
相对于现有的技术,本发明具有以下有益技术效果:
[0012]
(1)为了保证变桨动作的快速性和最小化跟踪误差,设计了积分滑模反步控制器,通过与分数阶微积分理论结合的方法,提高了控制性能。
[0013]
(2)针对积分滑模控制带来的抖振以及风力机系统中存在的内外扰动,设计了分数阶扩张状态观测器进一步提高控制精度。
[0014]
(3)将分数阶扩张状态观测器和分数阶积分滑模反步控制器应用于机械液压混合传动型风力机仿真模型中,保证其在额定风速以上时输出功率稳定。
附图说明
[0015]
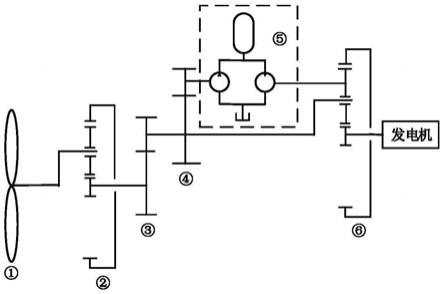
图1为混合传动系统结构原理图;
[0016]
图2为控制策略框图;
[0017]
图3为输出功率对比图;
[0018]
图中1,
①
风轮,
②
第一级行星齿轮,
③
第二级平行齿轮,
④
第三级平行齿轮,
⑤
液压系统,
⑥
第四级行星齿轮。
具体实施方式
[0019]
(1)建立风电系统模型
[0020]
风电机组主要由风轮机、传动系统、发电机、变换器和控制器组成。发电原理为通过将风轮机叶片捕获的风能转化为机械能,然后作用于发电机从而转化为电能,最后由变换器将电能转换为符合要求的交流电输送到电网。在整个过程中传送至电网的能量取决于风轮捕获的能量,其能量转换关系式如下:
[0021][0022]
其中,pr为风轮捕获的能量,ρ为空气密度,r为风轮半径,v为风速,c
p
为风能利用系数,可用叶尖速比λ和桨距角θ组成的非线性函数表示:
[0023][0024]
其中,叶尖速比λ可以由风轮转速ωr、风轮半径以及风速计算得到:
[0025][0026]
风轮转矩计算公式为:
[0027][0028]
风轮动力学方程为:
[0029][0030]
其中,k为传动系统总传动比,tg为发电机负载转矩,jr为风轮转动惯量,jg为发电机等效转动惯量。
[0031]
风力机常见的传动方式有机械传动和液压传动,而机械传动系统中齿轮箱易出故障、维修成本高,静液压传动系统存在效率较低、元件难以制造等问题。因此,为了在保证传
动系统效率的同时降低故障率,本发明建立了机械液压混合传动系统,其结构原理如图1所示,包括风轮
①
、第一级行星齿轮
②
、第二级平行齿轮
③
、第三级平行齿轮
④
、液压系统
⑤
和第四级行星齿轮
⑥
。传动系统的输入为风轮转速,首先驱动第一级行星齿轮转动,加速后由第一级行星齿轮的太阳轮输出转速驱动第二级平行齿轮转动,然后在第三级平行齿轮处实现分流,一部分经液压系统传递至第四级行星齿轮的行星轮,一部分直接输入至第四级行星齿轮的行星架,两部分在第四级行星齿轮处实现合流,最后由第四级行星齿轮的太阳轮输出高速轴转矩。液压系统包括液压泵、液压马达、蓄能器、溢流阀及油箱等元件。
[0032]
行星轮系中太阳轮、齿圈和行星架的转速、转矩存在如下关系:
[0033]
ωa+kω
b-(1+k)ωc=0(6)
[0034]
ta:tb:tc=1:k:(-(1+k))(7)
[0035]
k=zb/za(8)
[0036]
其中,ωa、ωb、ωc分别为太阳轮、齿圈和行星架的转速,ta、tb、tc分别为太阳轮、齿圈和行星架的转矩,za、zb分别为太阳轮和齿圈的齿数。
[0037]
混合传动系统的输入转速为:
[0038]
ω
in
=ωri1i2(9)
[0039]
其中,i1为第一级行星齿轮传动比,i2为第二级平行齿轮传动比。
[0040]
为简化分析,忽略液压系统中的摩擦和泄露,则输入轴动力学方程可表示为:
[0041][0042]
其中,t
in
为混合传动系统输入转矩,tm为传递给机械部分的转矩,th为传递给液压部分的转矩,j
in
为输入轴转动惯量。
[0043]
液压泵的转速和转矩可表示为:
[0044][0045]
其中,ω
p
为液压泵的转速,t
p
为液压泵的转矩,i3为第三级平行齿轮传动比。
[0046]
液压泵的动力学方程为:
[0047][0048]
其中,v
p
为液压泵的排量,ps为液压系统的压力差,j
p
为液压泵的转动惯量。
[0049]
液压马达动力学方程为:
[0050][0051]
其中,vm为液压马达的排量,ωm为液压马达的转速,tm为液压马达的转矩,jm为液压马达的转动惯量。
[0052]
在液压系统中,流量连续性方程可用式(14)表示:
[0053]vp
ω
p
=vmωm(14)
[0054]
混合传动系统输出轴动力学方程为:
[0055][0056]
其中,tc为行星架转矩,t
rg
为行星轮转矩,ωg为发电机转速。
[0057]
式(10)中传递给机械部分的转矩和传递给液压部分的转矩为:
[0058][0059]
其中,t
in
为混合传动系统输入转矩,k1为第一级行星齿轮中太阳轮和齿圈的齿数比。
[0060]
第四级行星齿轮的行星架输入转速和转矩为:
[0061][0062]
第四级行星齿轮的行星轮输入转速和转矩为:
[0063][0064]
根据式(6)和式(7)可知第四级行星齿轮的太阳轮输出转速和转矩为:
[0065][0066]
根据式(19)中太阳轮输出转速与式(9)中混合传动系统输入转速,可以得到第三级平行齿轮、液压系统和第四级行星齿轮组成的混合传动系统总的传动比:
[0067][0068]
则整个传动系统总传动比为:
[0069]
k=i1i2ih(21)
[0070]
变桨执行机构是风力机重要组成部分之一,可以定义为一个一阶函数,用式(22)表示:
[0071][0072]
其中,θ
ref
为参考桨距角,t
θ
为时间常数。
[0073]
风力发电机输出功率的计算公式为:
[0074]
p=ktgωr(23)
[0075]
根据式(5)和式(22),取风轮转速ωr和实际桨距角θ为状态变量,参考桨距角θ
ref
为输入控制量,则风力发电系统可用一个二阶系统表示,即:
[0076][0077]
其中,x1为风轮转速ωr,x2为实际桨距角θ,jv为传动系统总转动惯量,表达式为:
[0078]jv
=jr+k2jg(25)
[0079]
其中,jr为风轮转动惯量,jg为发电机等效转动惯量。
[0080]
系统的非线性仿射模型可表示为:
[0081][0082]
其中,
[0083]
(2)分数阶积分滑模反步控制器设计
[0084]
积分滑模控制有良好的鲁棒性,但不能保证系统状态在有限时间收敛,因此过快的风速波动会影响系统的稳定性,而抗干扰能力强、响应速度快的反步法可以弥补积分滑模控制的这些缺陷。此外,将整数阶积分滑模反步控制器扩展到分数阶,提高了控制器的灵活性以及系统的暂态稳定性。
[0085]
风轮转速的跟踪误差及其微分可以定义为:
[0086]
ea=ω
ref-ωr(27)
[0087][0088]
其中,ω
ref
为风轮转速的额定值。
[0089]
则稳定函数设计为:
[0090]
σ=h1ea(29)
[0091]
其中,h1为正常数。
[0092]
根据式(28)定义一个辅助跟踪误差变量:
[0093][0094]
能量函数1设计为:
[0095][0096]
根据式(29)和式(30),对上式求导可得:
[0097][0098]
积分滑模面设计为:
[0099][0100]
其中,h2为正常数,p为滑模增益。
[0101]
能量函数2设计为:
[0102][0103]
对上式求导可得:
[0104][0105]
根据式(30),可得eb的导数为:
[0106][0107]
根据反馈线性化理论,由系统(26)和式(27)可得:
[0108][0109]
其中,
[0110]
lgh(x)=g1(x)=0(39)
[0111]
进一步求导可得:
[0112][0113]
其中,
[0114][0115][0116][0117]
其中,x1为风轮转速ωr,x2为实际桨距角θ,t
θ
为时间常数,jv为传动系统总转动惯
量。
[0118]
因此,式(36)可转化为:
[0119][0120]
为了使系统尽快收敛到滑模面上,引入分数阶指数趋近律:
[0121][0122]
其中,α1为分数阶数,sign为符号函数,j、ε为常值系数,j值越大,系统收敛到滑模面的时间越短;ε值越小,系统的抖振越小。
[0123]
综合式(33)和式(46),可得分数阶积分滑模反步控制律为:
[0124][0125]
(3)分数阶扩张状态观测器及系统总控制律设计
[0126]
本发明将分数阶微积分理论和传统扩张状态观测器相结合,使得扩张状态观测器可调参数增加,变得更加灵活,鲁棒性更强。由系统(24)可知,风力机系统为二阶系统,故所对应的扩张状态观测器的状态变量有三个,分数阶扩张状态观测器设计为:
[0127][0128]
其中,z1、z2为风力机系统状态变量x1及其导数的估计值,z3为扩张状态变量x3的估计值,e1为状态变量x1的观测误差,β1、β2、β2为非线性函数系数,b为控制输入系数,α2为分数阶数,κ1、κ2决定函数的非线性度,非线性函数fal(e,κ,δ)表示为:
[0129][0130]
其中,κ决定函数的非线性度,δ表示函数的线性区间大小。
[0131]
综合式(47)和式(48),得到总控制律为:
[0132][0133]
下面分析分数阶扩张状态观测器的收敛性:
[0134]
存在如下的二阶系统:
[0135][0136]
对于分数阶扩张状态观测器,系统(51)可变换为:
[0137][0138]
其中,a1、a2为常数,ξ为外部扰动,f
f0
为具有分数阶动力学的系统总扰动。
[0139]
由于增加了一个状态变量,根据式(48)和系统(52)对风力机系统选取了新的状态
变量坐标方程:
[0140][0141]
其中,w1为风力机系统状态变量x1,w2风力机系统状态变量x2的α2阶导数,w3为风力机系统扩张状态变量x3,h为风力机系统扩张状态变量x3的α2阶导数。
[0142]
结合式(48)和式(53),可得分数阶扩张状态观测器的状态误差方程为:
[0143][0144]
上式可进一步变形为:
[0145][0146]
其中,
[0147]
根据式(55),对于一般分数阶系统的状态误差方程可用式(56)表示:
[0148][0149]
其中,
[0150]
当h为输入,状态误差为输出时,式(56)可变化为:
[0151][0152]
上式进一步转化为:
[0153]
[0154]
其中,
[0155]
式(57)通过终值定理可得到:
[0156][0157]
当|h(+∞)|≤m时,状态误差可表示为:
[0158][0159]
因此,状态误差的收敛程度与分数阶扩张状态观测器的带宽ω0有关,当ω0增大时,状态误差减小,逐渐向零趋近。
[0160]
表1风力机系统参数和控制器参数
[0161][0162]
基于本发明所提出的控制算法,进行了仿真验证。风力机系统参数和控制器参数如表1所示,风力发电机控制系统框图如图2,风力机变桨控制系统仿真结果如图3,仿真图中为本发明提出的控制算法和与之对应的整数阶控制算法对比。从图中可得:本发明提出的控制算法使得风力机功率收敛快、波动较小。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1