尾流监测、尾流管理以及针对这样的尾流监测、尾流管理的传感装置的制作方法
1.本发明涉及一种建立风电场的尾流管理的方法。所述方法包括使用来自一个或多个风力涡轮发电机(wtg)的一个或多个传感器监测一个或多个尾流状况的行为;以及根据所述尾流状况建立所述风电场的尾流管理的行为。还公开一种基于尾流管理优化风力涡轮机场的操作的方法以及一种用于生成尾流管理的系统。
背景技术:
2.风中的尾流和湍流为风力涡轮发电机(wtg)表现不佳的众所周知的原因。收获的风的质量对于风力涡轮发电机的电力生产是至关重要的。因此,在风电场中,位于一个或多个涡轮机下游或干扰风流的其它物体下游的每个风力涡轮发电机被直接暴露至上游的这些其它涡轮机和物体的、导致较低的风速和较高的湍流的尾流。生产损失方面的影响是非常显著的:众所周知,尾流损失可能降低风电场的年产量。
3.本领域技术人员将理解尾流状况的多种定义。通常,在风力涡轮发电机处于操作中时出现尾流。尾流和操作都取决于并且改变风力涡轮机周围的空气动力状况。因此,尾流影响湍流水平、产量等等。
4.ep2696067a2公开用于优化风电场的操作的方法和系统,其中使用布置于机舱或风力涡轮机上的振动传感器、功率计或激光雷达监测尾流状况。传感器数据被传输至中央风电场控制器。风波动或功率波动和振动水平可以被用来指示所述尾流状况。当湍流强度或风力的不足程度超过阈值时,尾流修正被触发。控制系统使用风估计器和负载/功率估计器来估计风况、电力生产以及负载,所述风况、电力生产以及负载被输入至使用聚类以及例如尾流模型的评估模块,以确定最佳偏摆角。
5.ep3517774a1公开用于优化风电场的操作并且隐含地建立尾流管理的方法和系统。使用测量例如功率输出、发电机速度以及机舱加速度的传感器监测尾流状况,其中根据机舱加速度估计湍流水平。从至少两个风力涡轮机接收的传感器数据被及时同步并且存储于数据库中。使用例如高斯过程或神经网络的机器学习来训练数据驱动模型,例如基于历史传感器数据和当前传感器数据的回归模型。上游风力涡轮机的电力生产被输入至所述数据驱动模型,并且所述数据驱动模型返回被用来控制所述风力涡轮机的预测值。
技术实现要素:
6.一个目的通过一种建立风电场的尾流管理的方法来实现。所述方法包括如下行为。
7.存在使用来自一个或多个风力涡轮发电机(wtg)的一个或多个传感器监测一个或多个尾流状况的行为。
8.监测可以基于来自一个或多个传感器的传感数据,所述一个或多个传感器被布置成放置于所述风力涡轮机的转子的一个或多个叶片(22)中的振动传感器。
9.可以存在通过处理传感数据的行为来识别相应的一个或多个尾流状况的行为。
10.存在根据所述尾流状况建立所述风电场的尾流管理的行为。
11.因此,由于所述风电场的总功率输出将优于单个风力涡轮机的单独的功率输出,所以减小了由于尾流引起的能量损失。
12.该尾流管理系统将决定、控制并且容许每个单独的wtg的运行,例如不同地偏摆,以使整个风电场的输出为最优的。
13.这种决策将取决于每个单独的风力涡轮发电机正在经历的尾流/湍流的量。尾流优化将针对整个风电场以最佳方式定向下游的每个单独的涡轮机,亦即,上游的风力涡轮机对下游的之后的涡轮机具有尽可能小的影响。
14.因此,一旦应用风电场管理优化,各个涡轮机将不处于单独的最佳条件状态中,但是由于风的质量提高,整个风电场将产生显著地更多的电力。这种尾流管理显著地提高整个风电场的产量。
15.现有技术依赖于要置于风力涡轮机外部的技术和诊断法。技术和诊断法的任一者都与风力涡轮机或设施完全地分离,比如基于机舱的风速计/scada或lidar技术。
16.与现有的尾流管理相反,所公开的尾流管理系统在尾流管理中依赖于或包含转子和/或叶片的状态或状况。
17.考虑来自所述风电场中的至少两个、更多个或所有风力涡轮机的振动、偏摆方向测量、转子前方的缓冲区的测量、降雨和冰雹测量、功率输出测量等等的所有的、以及可选地带时间戳的和时间同步的数据,并且将所述数据用来调节之后的机舱偏摆方向、和/或叶片俯仰、和/或转子rpm中的至少一个,以实现整个风电场的最佳全局功率输出。
18.在一个方面中,通过处理从相应的一个或多个风力涡轮发电机(wtg)提供的传感数据的行为来识别相应的一个或多个尾流状况而执行监测的行为。
19.数据的时间戳和所收集的数据的时间同步可以提高数据的质量。此外,可以使用一个较高质量的传感器来改善较低质量的传感器数据。
20.如所举例说明的,在处理所述传感数据以识别尾流状况的过程中,可以使用机器学习。
21.在一个方面中,处理传感数据的行为涉及识别所述传感数据中的作为尾流状况的空气动力状况。
22.例如,湍流状况可以由湍流强度阈值定义。空气动力状况也可以为雨状况或冰雹状况。
23.处理(例如提取)识别状况也可以逐步地映射空气动力状况。作为示例,层流状况可以被认为低于所述强度阈值,湍流状况可以高于所述阈值或者湍流状况可以被逐步地映射。
24.可以使用例如计算机实施的软件针对风电场的每个涡轮机实施对风的尾流和湍流的处理或提取。这样的软件可以包含用于模拟风电场中的尾流的计算流体动力学(cfd)。对于整个风电场,中央计算机托管所述尾流管理系统和尾流模型以及中央数据库,在所述中央数据库中,收集并且可选地同步所有数据。
25.一个或多个风力涡轮机直接与它们周围的一个或多个风力涡轮机相互作用,以便具有局部优化而不是全局优化。在一些迭代之后,这些局部优化将最终形成全局优化。
26.所述处理可以为动态尾流管理。当所述湍流强度对于单独的涡轮机或一组涡轮机而言高于某个可接受的、预定的阈值时,所述处理也可以为触发式尾流管理。可以与业主协作地针对每个风电场单独地调节一组可接受的、预定的阈值,业主通常会考虑一起优化风电场产量和寿命。该阈值将会考虑到各个wtg负载在操作期间可能受到诱发的机舱偏摆失准和/或叶片俯仰和/或转子rpm的影响而被限定。
27.处理可以为监测所述风电场中的至少两个风力涡轮发电机,但是可选地,将监测所述风电场中的所有风力涡轮机。在某些情况下,可以监测仅仅一组风力涡轮机。
28.在一个方面中,监测的行为基于转子传感数据或传感输入。
29.在每个单独的风力涡轮机中,可以存在生成传感数据的传感器。在一个、多个或所有叶片中可以存在加速度计或另外的检测振动的装置。替代地或可选地,可以通过发电机功率输出测量获得转子传感数据。
30.传感数据可以进一步基于来自声学传感器的声学传感数据。
31.数据来自一个或多个振动(例如加速度)传感器:一个或多个振动传感器位于一个或几个叶片内部并且可以被构造成连续地将数据无线地传输至收集盒。数据可以被打上时间戳。
32.这样,可以在位于例如叶片中的传感器节点中执行分析和处理或预处理的部分。
33.所述数据涵盖从安装时间开始收集的所有数据,并且它的大小和频率为这样的参数,所述参数可以根据所述数据所指示的状况签名和/或事件触发器而为固定的或者变化的。
34.通过一个、两个、三个轴线上的或者通常呈多轴设置的这些振动(例如加速度)传感器测量加速度。
35.时间戳和相对应的加速度值的最终数据可以与其它传感器或涡轮机状态数据聚合,并且被针对指定的移动时间窗口呈现给算法,所述移动时间窗口可以根据要观察的状况而改变。
36.在一个方面中,测量的行为基于带时间戳的和同步的传感数据。也就是说,使一个传感器输入与另一个传感器输入同步。在一个方面中,可以存在一个较高分辨率的传感输入和一个或多个较低分辨率的传感输入。
37.在一个方面中,结合测量传感输入局部地执行识别的行为。
38.振动传感器可以布置于传感器节点中。传感器节点可以构造有通信链路,所述通信链路被构造成向中央处理器传送数据。也可以直接在传感器节点中处理一些或所有数据。
39.传感器节点可以构造有用来执行如上所述的识别的处理器。传感器节点可以构造有用于更新签名的装置。传感器节点可以构造有用来预处理或者甚至处理传感输入的装置。这容许传感器节点使用尽可能少的功耗来运行。这样,与让传感器节点将数据(高采样率)传输至放置于别处的处理器相比,以额外的努力在传感器节点处提供处理器可能是有利的。由此,减轻与无线传输数据相关的不利的功耗影响。
40.传感器节点可以进一步设置有用来调节所述传感器的采样率/频率的装置。可以根据状况和签名动态地调节采样。传感器节点可以以低分辨率在低功耗下运行,并且如果期望签名或者以其它方式指示签名,则所述传感器节点可以调节采样和处理以提高分辨
率,以尝试更果断地确定是否存在异常状况的签名。
41.在正常的数据将被删除并且不被无线地传送用于进一步处理、或者替代地、仅仅正常化的数据将被传送用于进一步处理的意义上,传感器节点也可以以移动窗口运行。传感器节点中的算法可以基于振动(例如湍流强度数据),然后在触发事件之前和之后的某个时间潜在地触发采样频率的改变以及数据的存储,并且保留以用于进一步的详细处理。所述时间窗口可以根据实际情况为预定的或者变化的。
42.可以包含进一步的数据。可以存在风向和机舱偏摆方向测量。所述数据可以为带时间戳的或同步的。可以存在收集待处理的带时间戳的数据的数据收集单元。
43.可选地,可以将所有涡轮机的另外的至少一个lidar和gps坐标用于建立尾流图。本领域技术人员可能会发现具有年度风玫瑰图和年度风分布是有用的。
44.在一个方面中,基于放置于所述转子的一个或多个叶片中的一个或多个振动(例如加速度)传感器执行监测的行为。这样的传感器可以为如上所述的那样。
45.可以使用指示湍流、湍流强度的特征提取来处理所述传感器数据,并且所述传感器数据因此建立尾流的测度。
46.在一个方面中,处理的行为基于高频采样所提供的旋转传感数据。
47.一个传感器可以以高频率采样,并且因此被用来提高以较低的采样频率获得的其它传感输入的准确性。在一个方面中,处理的行为基于带时间戳的和同步的传感数据。这样,可以提高准确性。
48.在一个示例中,叶片中的一个振动传感器节点可以为高频采样传感器。
49.在一个示例中,可以对功率输出进行过采样/快速采样、亦即以高频率进行高频采样,以量化旋转速度或功率输出。这样的采样可以为比如罗果夫斯基线圈的传感器。
50.在一个方面中,进一步使用可选地通过lidar测量获得的临时设置的且实际的尾流状况监测来执行监测的行为。可以存在通过相对于所述临时的实际的尾流状况进一步校准所处理的传感数据而执行的处理的行为。
51.在一个示例中,基于所概述的行为,风电场上的尾流管理系统可以具有几种方法。
52.可选地,所有数据为带时间戳的数据和时间同步的数据。从叶片中的传感器收集数据作为振动,例如加速度,从至少两个风力涡轮发电机以及甚至从风电场中的所有风力涡轮机收集数据作为偏摆方向测量、功率输出测量。数据被按照所概述的那样处理、被考虑并且被用来调节以下至少一项:机舱偏摆方向和/或叶片俯仰、和/或转子rpm,以实现整个风电场的最佳全局功率输出。
53.可以通过基于从位于叶片中的振动和加速度传感器收集的数据的算法来估计转子前方的缓冲区。因此,可以实现转子前方的缓冲区的对称性,以改进能量捕获。
54.一个或多个风力涡轮机直接与它们周围的一个或多个风力涡轮机相互作用,以便具有局部优化而不是全局优化。在一些迭代之后,这些局部优化将最终形成全局优化。
55.尾流监测或管理可以为动态尾流管理。也就是说,当所述湍流强度对于单独的涡轮机或一组涡轮机而言高于某个可接受的、预定的阈值时,触发尾流管理。可以与业主协作地针对每个风电场单独地调节一组可接受的、预定的阈值,业主通常会考虑一起优化风电场产量和寿命。该阈值将考虑到各个wtg负载在运行期间可能受到诱发的机舱偏摆失准和/或叶片俯仰和/或转子rpm的影响而被限定。
56.将监测所述风电场中的至少两个风力涡轮发电机,但是可以监测所述风电场中的所有风力涡轮机。
57.在可能将监测仅仅一组涡轮机的情况下,例如,可以监测非连续的风力涡轮机。
58.这样,可以通过一种优化带有多个风力涡轮发电机(wtg)的风电场的操作的方法来实现目的。所述优化方法可以包括以下行为。
59.存在使用一个或多个传感器来监测来自一个或多个风力涡轮发电机(wtg)的一个或多个尾流状况的行为。
60.存在根据所述尾流状况建立所述风电场的尾流管理的行为。
61.存在确定单独的风力涡轮发电机(wtg)控制设置作为优化的尾流管理的电力生产函数和单独的风力涡轮发电机(wtg)参数的行为。
62.存在基于单独的风力涡轮发电机(wtg)控制设置来操作所述风电场中的一个或多个风力涡轮发电机(wtg)的行为。
63.在一个方面中,如所公开的那样,执行监测尾流的行为。可以通过根据所述尾流状况使所述尾流管理中的总尾流最小化来执行确定单独的风力涡轮发电机(wtg)的控制设置的行为。
64.也就是使总湍流最小化。
65.在一个方面中,操作一个或多个风力涡轮发电机(wtg)的行为涉及俯仰、偏摆、调节旋转速度或其组合的行为。
66.可以通过将要描述的系统来实现目的。所述系统或所述系统的部分可以被用来执行所公开的行为。所述系统可以被构造成用于生成尾流管理。所述系统可以包括布置于相应的一个或多个风力涡轮发电机上的一个或多个传感器。
67.可以存在适于执行所概述的方法的行为的装置。
68.可以存在控制器系统,所述控制器系统被构造成用于优化带有多个风力涡轮发电机(wtg)的风电场的操作。所述控制器系统可以包括来自一个或多个传感器和装置(包括适于执行所概述的方法的行为的计算装置,比如计算机)的传感输入。
69.所述控制器系统可以包括一个或多个传感器,所述传感器可以为振动(例如加速度)传感器,所述振动(例如加速度)传感器被构造成放置于风力涡轮发电机(wtg)的一个或多个叶片中并且被构造成测量指示湍流的转子叶片振动/加速度。
70.稍后将举例说明这样的传感器和布置。
71.所公开的系统和控制器系统可以包括开发尾流管理系统所需的仪器。可以存在计算机实施的方面。
72.例如,为了针对风电场的每个涡轮机监测风的尾流和湍流,可以应用以下内容。
73.可以存在用于模拟风电场中的尾流的计算流体动力学(cfd)的设置。
74.各个风力涡轮发电机可以具有以下形式的传感器:a)加速度计或另外的检测所有叶片中的振动的装置,b)发电机功率输出测量装置以及c)机舱偏摆方向测量装置,和/或d)用于收集待处理的带时间戳的数据的收集盒。
75.对于整个风电场,可以存在托管所述尾流管理系统和尾流模型以及中央数据库的中央计算机,在所述中央数据库中,收集并且同步所有数据。
76.此外,可以存在lidar系统和所有涡轮机的gps坐标以建立尾流图。具有年度风玫
瑰图和年度风分布并且将这样的信息包含于尾流管理中可能是有用的。
77.湍流强度阈值可以被定义或设定为可接受的风况。
78.用于最终的尾流管理系统和计算机实施的模型构造的仪器和参数可以在每个单独的风力涡轮发电机中包含:a)可以处于一个或所有叶片中的加速度计或另外的检测振动的装置,b)发电机功率输出测量装置,c)机舱偏摆方向测量装置,以及d)用于收集待处理的带时间戳的数据的收集盒。对于整个风电场,可以存在所有涡轮机的gps坐标。在中心单元与目标风力涡轮机之间可以存在通信系统。所述中心单元可以被构造成用于接收数据、处理数据、向所有涡轮机的控制器发出指令/决策。
79.所述操作可以涉及自主中心单元,所述自主中心单元收集和实时地处理从至少两个风力涡轮发电机以及可能从风电场的所有风力涡轮机收集的可选地带时间戳的和时间同步的数据,如果需要尾流管理,所述数据形成决策的基础。如果是这样的话,在操作方面发出指令或控制设置:a)新的机舱偏摆方向、和/或b)新的叶片俯仰设置、和/或c)所有目标风力涡轮发电机的转子rpm。
80.可选地,对于整个风电场,可以存在临时(例如最初)安装的lidar系统,以获得湍流计算或使得能够更可靠地和/或更快速地识别操作状况。可以针对lidar测度和/或雨测度或冰雹测度校准或调节来自叶片中的传感器的振动数据。
81.针对各个目标风力涡轮机进行的尾流管理决策的结果可以包含一组修正的关于风力涡轮机的单独的顺时针或逆时针机舱偏摆偏移值、一组修正的单独的叶片俯仰值、或转子的一组修正的减小的/增大的旋转速度。
82.这样,可以存在这样的风电场:该风电场包括如所公开的用于建立尾流管理的系统;可以存在如所公开的并且被构造成用于控制如所公开的单个、更多个或所有风力涡轮发电机(wtg)的控制器系统。
83.可以存在一种计算机程序产品,所述计算机程序产品包括使所公开的系统执行所公开的方法的行为的指令。可以存在其上存储有所述计算机程序的计算机可读介质。
附图说明
84.将在附图中描述本发明的实施例,其中:
85.图1示例说明建立尾流管理的方法;
86.图2示例说明识别尾流状况的进一步的方面;
87.图3示例说明使用尾流管理操作风力涡轮发电机的方法;
88.图4示例说明风力涡轮发电机;
89.图5示例说明叶片内部的传感装置;
90.图6示例说明传感装置的进一步的方面;
91.图7示例说明风力涡轮发电机上的传感装置的进一步的可选的或替代的方面,所述传感装置包含传感器节点装置;
92.图8示例说明带有与远程处理器/基于云计算的处理器相互作用的传感装置的风力涡轮发电机;
93.图9示例说明传感器节点的构造;
94.图10示例说明没有尾流管理的风电场;
95.图11示例说明带有尾流管理的风电场;
96.图12示例说明尾流管理的过程;
97.图13示例说明计算用于尾流图的湍流强度的计算;以及
98.图14示例说明尾流管理的过程。
具体实施方式
99.[0100][0101]
[0102]
图1示例说明建立1000风电场80的尾流管理230的方法,参见图10至14。方法1000包括使用来自一个或多个风力涡轮发电机12(参见图4和6)(wtg)的一个或多个传感器40监测100一个或多个尾流状况130的行为,参见图12和13。
[0103]
存在根据尾流状况130建立200风电场80的尾流管理230的行为。
[0104]
基于来自风力涡轮发电机12的传感输入140执行监测的行为。传感输入140可以包括来自放置于风力涡轮机叶片中的传感器节点的数据。
[0105]
图2示例说明识别尾流状况的进一步的方面。应当注意的是,可以独立于建立200尾流管理230的行为执行监测100的行为。
[0106]
可以通过处理120从相应的一个或多个风力涡轮发电机12(wtg)提供的传感数据31的行为来识别110相应的一个或多个尾流状况130(参见图10和13)而执行监测100的行为。
[0107]
处理120传感数据31的行为涉及识别传感数据31中的作为尾流状况130的空气动力状况;作为示例,参见图13。
[0108]
监测100的行为可以基于转子传感数据42,参见图5至7。
[0109]
特别地,可以基于放置于转子14的一个或多个叶片22(参见图4)之中或之上的一个或多个振动传感器50(参见图7)来执行监测的行为。
[0110]
可以使用机器学习ml和/或人工智能ai来执行监测100的行为,包含识别110的行为或处理120的行为。
[0111]
图3示例说明使用尾流管理230操作风力涡轮发电机12的方法。
[0112]
示例说明一种优化2000带有多个风力涡轮发电机12(wtg)的风电场80(参见图10、11)的操作的方法。所述方法包括以下行为。
[0113]
存在比方说使用一个或多个传感器40监测100来自一个或多个风力涡轮发电机12(wtg)的一个或多个尾流状况130的行为。
[0114]
存在根据尾流状况130建立200风电场80的尾流管理230的行为。
[0115]
存在确定300单独的风力涡轮发电机12(wtg)控制设置350作为尾流管理230的优化的电力生产函数和单独的风力涡轮发电机12(wtg)参数的行为,参见图10、11、12和14。
[0116]
存在基于单独的风力涡轮发电机(12)(wtg)控制设置350来操作400风电场80中的一个或多个风力涡轮发电机12(wtg)的行为。
[0117]
可以如图2中所概述的那样执行监测100的行为。
[0118]
在操作或优化2000的一个方面中,通过根据尾流状况130使尾流管理230中的总尾流最小化来执行确定300单独的风力涡轮发电机12(wtg)控制设置350的行为。
[0119]
在一个方面中,操作400一个或多个风力涡轮发电机12(wtg)的行为涉及俯仰、偏摆、调节旋转速度、或其组合的行为;如图11中所示。
[0120]
图4示例说明风力涡轮发电机12(wtg),所述风力涡轮发电机包括支撑机舱19的塔架13,所述机舱带有可旋转地连接并且形成转子14的叶片22。
[0121]
图5示例说明带有转子14的风力涡轮发电机12上的叶片22a、22b、22c上的传感装置。叶片22a、22b、22c为一组转子叶片20。每个叶片22a、22b、22c包括一组叶片传感器40a、40b、40c作为传感器装置41。在当前情况下,每一组叶片传感器40a、40b、40c包括叶片传感器42a、42b、42c。叶片传感器42可以为振动传感器50或声学传感器60。
[0122]
传感装置可以为用于检测湍流强度以形成尾流场图的输入的系统的一部分。
[0123]
叶片传感器42被构造成与控制器或计算装置72通信74。如这里所示例说明的,通信74可以为有线的或无线的。
[0124]
风力涡轮发电机12被公开为在每个叶片22a、22b、22c上具有一组叶片传感器40a、40b、40c。然而,由于叶片22a、22b、22c在单个公共平面中运动,每个叶片22a、22b、22c经历相同的状况。因此,本发明可以由这样的风力涡轮发电机12来实现:该风力涡轮发电机使一组叶片20中的一个叶片22具有一组叶片传感器40。所述一组叶片传感器40可以为一个、两个或更多个叶片传感器42a、
……
、42n。
[0125]
图6示例说明风力涡轮发电机12上的传感装置的进一步的方面。可以存在被构造成为来自传感装置41的数据31提供时间戳34的定时器或时钟,所述定时器或时钟因此提供带时间戳的数据32或同步的数据以供计算单元72处理。
[0126]
风力涡轮发电机(wtg)12具有转子14和一组转子叶片20。所述一组转子叶片20具有三个转子叶片22a、22b、22c。
[0127]
每个叶片22a、22b、22c包括一组叶片传感器40a、40b、40c。在当前情况下,每组叶片传感器40a、40b、40c包括叶片传感器42a、42b、42c。
[0128]
在发电机28处示出另一个传感器装置41。在该实施例中,所述另一个传感器为旋转传感器(rpm传感器或振动传感器),比如测量旋转速度610的高采样速度传感器。如图2或其变型中所示,并且基于传感器42abc,所述系统可以被构造成用于同步240的行为,并且使用时间戳34相对于至少一个另外的传感器41执行同步以获得带时间戳的数据32。
[0129]
发电机28处的传感器装置41可以为被布置成用于精确地测量发电机输出中的波动的罗果夫斯基线圈。
[0130]
传感装置可以为用于操作风力涡轮发电机的系统的一部分。计算装置72或控制器可以为单个单元或如这里所示例说明的那样分布。
[0131]
风力涡轮发电机12被公开为在每个叶片22a、22b、22c上具有一组叶片传感器40a、40b、40c。然而,由于叶片22a、22b、22c在单个公共平面中运动,每个叶片22a、22b、22c经历相同的状况。因此,本发明可以由这样的风力涡轮发电机12来实现:该风力涡轮发电机使一组叶片20中的一个叶片22具有一组叶片传感器40。所述一组叶片传感器40可以为一个、两个或更多个叶片传感器42a、
……
、42n。
[0132]
图7示例说明风力涡轮发电机12上的传感装置的进一步的可选的或替代的方面。
[0133]
传感器42可以被作为传感器节点45(参见图9)植入,如传感器节点45a、45b、45c所示例说明的。传感器节点可以具有振动传感器50和声学传感器60。还可以存在额外的传感器装置41。
[0134]
传感器节点45可以包括基本的处理72,并且适于执行测量的行为或测量的行为的至少一部分。
[0135]
一组传感器40可以被理解为带有一个或多个传感器的传感器节点45。这样的传感器节点45可以包括用来构造、收集、存储以及处理所生成的传感器数据的处理器或装置。传感器节点45可以具有用来与控制器(未示出)或其它传感器节点通信的通信装置。传感器节点45可以具有用来使用时间戳34进行同步240(如先前所示例说明的)的装置,比如传感器50、60。
[0136]
图8示例说明风力涡轮发电机12,所述风力涡轮发电机带有与远程处理器/基于云计算的处理器72相互作用的传感装置,所述传感装置作为用于操作风力涡轮发电机的系统90的一部分。
[0137]
旋转装置10包括一组转子叶片20。所述一组转子叶片20包括三个转子叶片22a、22b、22c。
[0138]
每个叶片22a、22b、22c包括一组叶片传感器40a、40b、40c。在当前情况下,每组叶片传感器40a、40b、40c包括叶片传感器42a、42b、42c。
[0139]
由计算装置72处理数据集30。风力涡轮发电机12可以具有用于生成时间戳34的时钟。在这种情况下,时间戳被进一步同步并且被从全局时间服务器传送。因此,数据集30可以为带时间戳的数据32。替代地,传感器节点45可以被构造成生成被同步的数据,并且可以在传感器节点45级别应用时间戳34。
[0140]
系统70可以经由云服务/连接服务与操作者系统、移动装置、客户端服务器以及存储器或数据库相互作用。对于长期监测、警报或服务程序,可以经由云获得进一步的访问或镜像或监测。
[0141]
可以在单个处理器72装置中或者在如这里所示例说明的那样分布的装置中执行本文中所公开的测量传感数据的方法和行为。
[0142]
图9示例说明传感器节点45的构造。存在节点功率46管理布局,所述节点功率管理布局可以包含能量源、能量存储器、功率管理控制器以及用于构造/控制和可能的充电的接口。
[0143]
传感器节点45被示例说明为具有处理器或计算装置72。传感器节点45包含生成数据31的传感装置41。示例说明的是振动传感器50,所述振动传感器在这种情况下具有三条输出线路并且可以为例如三轴加速度计。可选地,存在声学传感器60。可选地,存在另外的一个或多个传感器装置41。
[0144]
计算装置72可以适于执行指令,以执行所概述的用来执行测量或对传感器数据进行采样的行为中的一个或多个或全部。
[0145]
传感器节点45构造有通信装置74,并且在这里构造有存储装置76。
[0146]
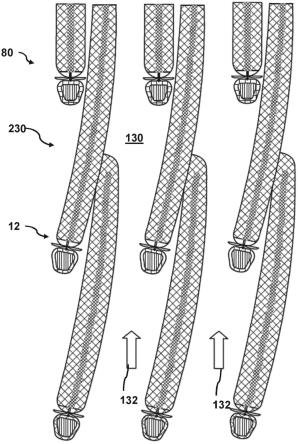
图10示例说明没有尾流管理230的风电场80。
[0147]
风电场80包括一组风力涡轮发电机12,所述一组风力涡轮发电机经历风向132,由于风力涡轮发电机12的定位和定向,所述风向导致特定的尾流状况130。风如两个箭头所指示的那样吹来,并且可以看出,第二排和第三排的涡轮机在后面处于涡轮机的尾流中。
[0148]
图11示例说明具有尾流管理230的风电场80;风如两个箭头所指示的那样吹来,并且可以看出,由于尾流管理,涡轮机现在被定向成使得减小尾流场的影响。
[0149]
图12示例说明尾流管理230的过程。参考流程图和前面的描述,流程图概述了风力涡轮机场的考虑尾流场图的操作。
[0150]
a:存在起动条件和评估;
[0151]
b:确定wtg是否在操作中?
[0152]
c:检测/确定各个wtg上的湍流强度;
[0153]
d:确定所述湍流强度水平是否为所有wtg可接受的?
[0154]
e:将湍流检测周期的数据/信息传输/发送至通用数据收集盒;
[0155]
f:根据所建立的湍流强度尾流场,根据所限定的尾流管理目标计算并且限定尾流减小策略;
[0156]
g:从收集盒向风电场的所有wtg控制器发送/传输指令和/或策略。
[0157]
关于d,d可以包含监督式或非监督式机器学习技术,所述监督式或非监督式机器学习技术使用来自传感器节点的振动数据和用于标记数据的lidar单元(如果为监督式)。算法将一个或多个传感器的振动测量结果作为输入,并且根据用途输出湍流强度,所述湍流强度被表示为百分比(0至100%)或单位数(0至1)。
[0158]
关于f,作为尾流管理优化的示例,计算可以被建立为:
[0159]
最大值功率i(θi,ti,wci,ri和/或pi和/或其它)
[0160]
受制于:
[0161]
尾流最小化:
[0162]
θi∈(θ
min
,θ
max
)
[0163]
ti∈(t
min
,t
max
)
[0164]ri
∈(r
min
,r
max
)
[0165]
pi∈(p
min
,p
max
)
[0166]
或者其它
[0167]
尾流最小化+优化涡轮机寿命:
[0168]
li∈(l
min
,l
max
)
[0169]
或者其它
[0170]
其中:
[0171]
功率
i-来自wtgi的功率输出
[0172]
n-风电场中的涡轮机的数量(包含于优化中)
[0173]
θ
i-来自wtgi的静态偏摆失准
[0174]
t
i-来自wtgi的湍流强度
[0175]ri-来自wtgi的转子rpm
[0176]
p
i-来自wtgi的叶片俯仰角
[0177]
l
i-来自wtgi的平均偏摆失准。
[0178]
每个单独的wtgi的输出:[θi,ri和/或pi和/或其它]
[0179]
图13示例说明用于尾流图的湍流强度的计算。
[0180]
参考先前的图,存在使用仅仅来自位于风力涡轮机叶片22内部的传感器42的加速度计数据来计算湍流强度(ti)检测的示例。
[0181]
所述数据是被作为尽可能相同地放置于风力涡轮发电机的所有叶片中的3轴加速度计的加速度数据获得的。加速度计传感器的三个轴(通道1、通道2和通道13)全部彼此垂直,以便记录每个可能的方向的加速度。
[0182]
传感器数据的长度由下式定义:
[0183]
[0184]
该长度被用于计算,因为它独立于传感器42的取向(它被安装于叶片中的方式)。无论传感器42以什么取向安装于叶片22中,长度的输出将总是相同的。
[0185]
图13a示出,在旋转一圈半的过程中,传感器的长度在风力涡轮机叶片内部是什么样子。图13b示出特征提取和度量计算。
[0186]
为了消除传感器到转子的中心的安装距离的影响,在预处理过程中,我们将数据的输出长度居中并且减小。
[0187]
可以对来自叶片的加速度计的数据应用直接计算以确定湍流强度。也可以对来自叶片的加速度计的数据应用机器学习算法,以便检测撞击叶片的风的湍流强度。
[0188]
为了标记完整的数据并且训练所述系统,可以使用来自临时安装的lidar的lidar数据,所述lidar数据提供关于实际湍流强度的信息。
[0189]
图13c-示出特征比较和湍流强度确定。
“‑‑‑”
线产生为“0.5”的湍流指数,“____”线产生为“0.2”的湍流指数。
“‑
.-.”线为待确定的湍流指数的示例,所述湍流指数可以基于已知的湍流强度。可以根据所指示的度量确定湍流强度。机器学习(ml)算法的输入为加速度数据的居中的-减小的长度的度量。
[0190]
所述度量可以选自各种众所周知的测度,例如:峰度、波峰因数、rpm的频率等等。输出为湍流强度值。
[0191]
可以通过限定风电场的经受最高尾流效应的两个或三个风力涡轮机来执行使用尾流管理230的操作方法。可以可选地在整个风电场之上存在测试通信/控制系统,所述测试通信/控制系统解决优化所限定的两个或三个涡轮机的问题。
[0192]
可以对集中于两到三个涡轮机的自主计算(决策)系统进行测试。
[0193]
在操作时,可以对单独的wtg负载进行测试,比方说,用偏摆失准。
[0194]
基于由传感器(例如加速度计)建立的尾流场图,限定尾流管理策略并且对管理策略的应用范围做出选择/抉择:全局的还是局部的、所有涡轮机/仅仅一组涡轮机、应当控制什么(偏摆、俯仰、负载、全部)等等。
[0195]
在应用尾流管理策略之前,可以存在用于整个风电场的测试通信/控制系统和自主计算系统。
[0196]
图14示例说明尾流管理230的过程。参考流程图和前面的描述,流程图概述了风力涡轮机场的考虑尾流场图的操作。
[0197]
a:存在起动条件和评估;
[0198]
b:确定风况(空气动力状况)自上次检查以来是否发生变化?
[0199]
c:确定一些/全部wtg是否在操作中?
[0200]
d:建立/检测各个wtg上的湍流强度(空气动力状况);
[0201]
e:确定湍流强度(空气动力状况)水平是否为可接受的?
[0202]
f:确定尾流管理/控制器是否知道如何在所述湍流强度(空气动力状况)下优化操作?
[0203]
g:将当前时段的湍流强度(空气动力状况)和/或功率输出的一些/全部当前数据发送/传输至通用收集盒;
[0204]
h:执行计算并且根据尾流管理目标限定尾流减小策略;-一个示例可以根据图12中的步骤f。
[0205]
i:应用风电场的新优化;从收集盒向所述风电场的一些/全部风力涡轮机控制器发送/传输指令/控制以及策略;
[0206]
j:确定风况(空气动力状况)是否发生变化?
[0207]
k:确定优化是否充分/令人满意?
[0208]
l:将用于新风况(空气动力状况)的新优化计划添加至知识数据库(优化计划字典)
[0209]
进一步,可以存在以下步骤:
[0210]
m:根据经验应用风电场的优化。从收集盒向风电场中的所有风力涡轮机控制器发出指令和策略。
[0211]
关于步骤f:尾流管理算法涉及优化算法,以便加速创建经验集合的过程,并且每当需要使用尾流管理时,程序首先查看所述集合。如果事件已经在集合中被登记,那么程序再次继续进行同一优化算法。否则,程序直接转到步骤m。如果事件没有在经验集合中,那么程序继续进行优化,亦即,步骤g。
[0212]
图15示例说明本领域技术人员将什么认作作为监督式机器学习3010的机器学习3000。
[0213]
存在用带标记的时间序列数据3085的传感数据31训练3100监督式机器学习模型(sml)3015并且建立所述监督式机器学习模型(sml)3015的行为。
[0214]
实际的训练3100基于带有被标记的数据3085的传感数据31。
[0215]
训练3100可以使数据度量与比如空气动力状况(比如湍流、雨/冰雹等等)的尾流状况相关联。训练3100可以使数据度量与湍流强度相关联。训练形成监督式机器学习模型(sml)3015。
[0216]
存在通过将带标记的时间序列数据3085的传感数据31输入至监督式机器学习模型(sml)来验证3200监督式机器学习模型(sml)3015、输出所计算的数据标记以及将输出与已知的尾流状况130进行比较3220的一个或多个行为。
[0217]
确定1300的行为(未示出)可以为所述验证的上游路径,其通过将传感数据31输入至监督式机器学习模型(sml)3015并且从监督式机器学习模型(sml)3015输出尾流状况130而被执行。
[0218]
监督式机器学习模型3015将根据带有标记的数据3085进行自我训练(“编写自己的算法”)。显而易见的是,并且为了验证算法或模型的质量,使用具有已知的输出结果的数据来相对于模型3测试带标记的数据85,以将输出与已知的标记进行比较。
[0219]
图15b示例说明所概述的监督式机器学习模型3015,其中对相应的n个振动信号31
i、
……
、n
(未示出)执行训练3100的行为,从而生成相应的3015监督式机器学习模型3015
i、
……
、n
。
[0220]
验证3200
i、
……
、n
的行为包括由相对应的n个振动传感器40i、
……
、40n获得的相应的n个振动信号311、
……
、31n并且被针对所述相应的n个振动信号执行。基于n个标记(y
i、
……
、n
)执行训练3100的行为。
[0221]
验证3200的行为包括n个标记(y
i、
……
、n
)的预定平均测度并且是基于n个标记(y
i、
……
、n
)的预定平均测度并且最终通过将所述平均测度与带标记的3085数据进行比较3220而被执行的。所述平均测度可以为中数平均测度或类似的平均测度。
[0222]
在这种情况下,几个传感器被单独地使用,并且输出的结果被组合以找到最佳可能值。
[0223]
图16示例说明预测数据与测量数据之间的基于湍流指数(ti)的监督式机器学习算法的混淆矩阵。在x轴上,存在使用传感器的振动预测的湍流强度。在y轴上,存在由基于机舱的lidar测量的真实湍流强度、亦即尾流状况。
[0224]
由于数据聚集在对角线周围,所以算法表现得非常好。除了两个或三个值之外,所有其它值都正好在对角线上,这意味着算法非常好地预测用于尾流管理的湍流指数(ti)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1