用于多转子风力涡轮机的前束角控制的制作方法
本发明涉及用于多转子风力涡轮机的控制系统,包括这种控制系统的多转子风力涡轮机,以及控制多转子风力涡轮机的方法。
背景技术:
1、风力发电行业的总体趋势是使用具有更大转子的越来越大的风力涡轮机,以使来自每个风力涡轮机的功率输出最大化,从而降低电力生产的成本。
2、提供大型、经济高效的风力涡轮机的一种方法是多转子风力涡轮机(mr风力涡轮机),图1示意性地示出了一个示例。mr风力涡轮机1包括多个转子机舱组合体(rna)3,每个转子机舱组合体包括转子4和被容纳在机舱5内且被配置成用于发电的发电机。rna3各自通过支撑装置6安装在共同的塔架2上,该支撑装置包括一个或多个rna支撑元件,例如臂8,这些rna支撑元件沿相反方向从塔架2向外延伸。图1示出了具有呈单层布置的4个rna的涡轮机,但使用两个或更多个rna的其他布置方式也是可行的。
3、支撑装置6可以通过中央偏航系统9安装到塔架上,该中央偏航系统被配置为改变支撑装置6相对于塔架2的偏航角,从而使安装在其上的rna3与盛行(prevailing)风向一致。中央偏航系统9可以是被配置为相对于塔架2移动支撑装置6的主动系统,或者是被配置为利用风力来控制支撑装置6的角度的被动系统,如us2018023543和us2019048847中所述的。
4、ep3339631描述了一种多转子风力涡轮机,其中一对面向上风/下风的rna通过单独的偏航系统被附加地安装在共同的横梁上,该单独的偏航系统被配置为使rna相对于横梁偏航,以便单独地调整rna与盛行风向的对准。
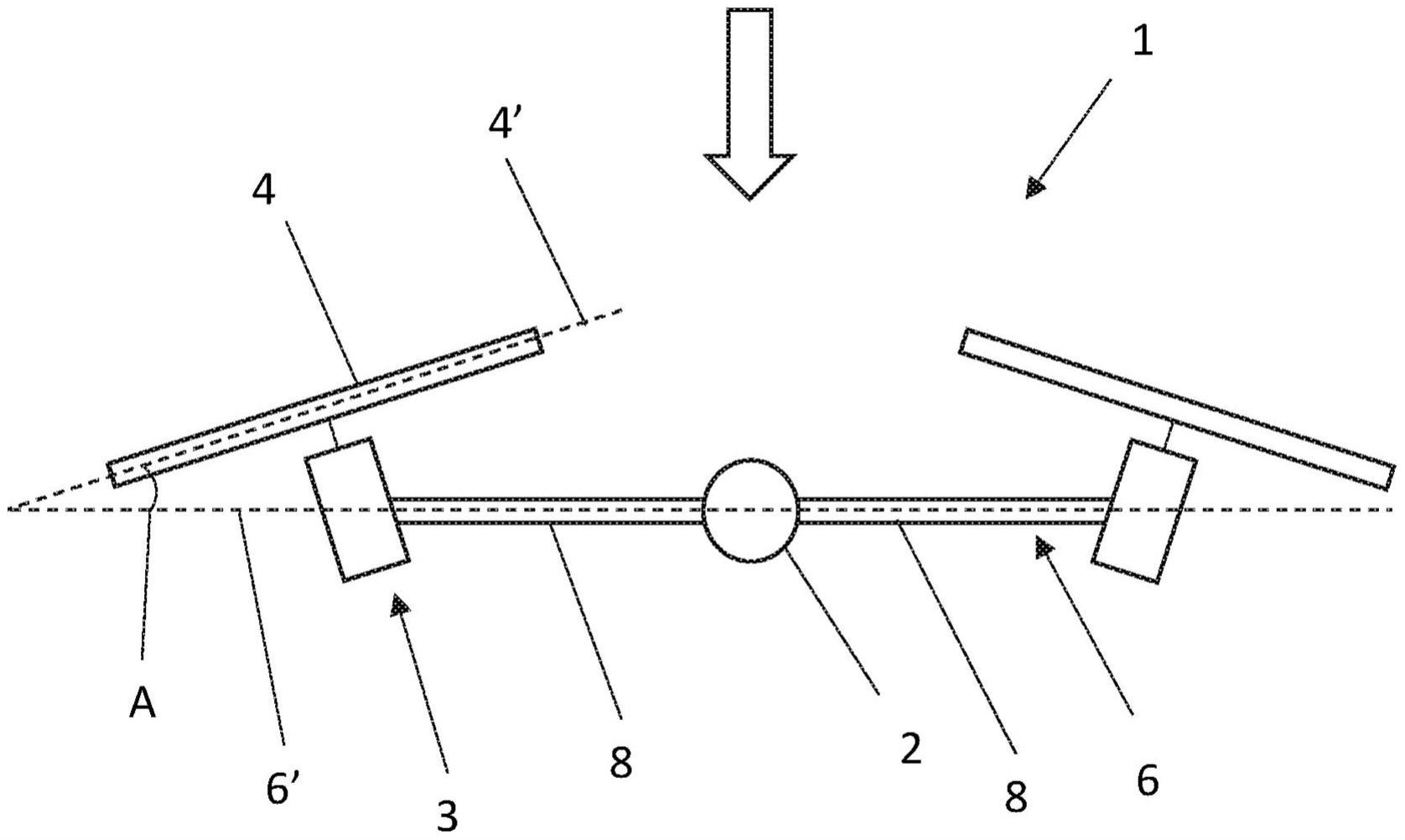
5、rna3的前束角(toe angle)可被定义为转子4所在的平面4'与支撑装置6之间在水平面内的角a,如图2中所示的。应理解的是,转子4的平面4'是转子在其中旋转的平面,也就是垂直于转子的旋转轴的平面。在一些情况下,rna 3的前束角可以相对于rna 3被安装在其上的臂8的纵向方向进行测量。然而,当支撑臂8不在共同的竖直平面内延伸时,例如,当支撑臂8在迎风方向上成角度时,rna 3的前束角优选是相对于整个支撑装置6的平面6'测量的,该平面是通过rna3的安装点或偏航轴的竖直平面。
6、在一些情况下,转子4的叶片可被布置成圆锥角,使得叶片的纵轴不垂直于转子4的旋转轴。例如,转子4的叶片可以在迎风方向上远离支撑装置6成角度,以增加叶片的末端和支撑装置6之间的间隙。(应理解的是,在这种情况下,转子4的平面4'仍然垂直于转子的旋转轴,并且不受叶片的圆锥角的影响。)
7、为了确保叶片的末端和支撑装置6之间有足够的末端间隙,rna 1也可被操作而处于正前束角,如图2所示的。(应理解的是,出于例示说明性的目的,图2中的正前束角的大小被夸大了。)选择正前束角进一步增加了末端间隙。然而,所产生的转子4的轴线与盛行风向之间的偏航误差的增加,也可能导致转子4、支撑装置6和塔架2在强风条件下的负载增加。
8、正是在这种背景下本发明已被设计出来。
技术实现思路
1、本发明的第一方面提供了一种多转子风力涡轮机,包括通过相应的偏航系统被安装在支撑装置上的至少两个转子机舱组合体,以及用于控制转子机舱组合体相对于支撑装置的前束角的前束角控制系统;其中前束角控制系统被配置为在第一模式下运行,在第一模式下,当风力涡轮机在主要生产模式下发电时,转子机舱组合体被保持处于正前束角;其中,前束角控制系统还被配置为监测风力涡轮机的运行模式,并且在已满足基于运行模式的触发条件的情况下切换到第二模式,在第二模式下,转子机舱组合体的偏航系统被运行以减小转子机舱组合体的前束角。
2、通过在第一模式下将转子机舱组合体保持处于正前束角,前束角控制系统能够确保在风力涡轮机正在其主要生产模式下运行而发电时转子机舱组合体的叶片末端与支撑装置之间有足够的末端间隙。然而,通过切换到其中转子机舱组合体的前束角被减小的第二模式,前束角控制系统也允许每个转子机舱组合体的偏航误差在一定的运行条件下被最小化,例如在高风速的情况下。通过这种方式,本发明能够减小风力涡轮机在极端天气条件下所承受的负载,从而使风力涡轮机的包括叶片在内的各种部件的重量和成本得以降低。
3、根据本发明的实施例,可以设置各种不同的基于运行模式的触发条件,以使前束角控制系统切换到第二模式,从而减小转子机舱组合体的前束角。例如,基于运行模式的触发条件可包括以下中的任何一项或多项:a)风力涡轮机已退出主要生产模式,b)风力涡轮机已进入降额生产模式或高风生产模式,c)风力涡轮机因高风速已进入切出模式或空转模式,d)风力涡轮机已进入关机模式或断开模式,其中风力涡轮机与电网断开。
4、在一些实施例中,只要已检测到上述运行或模式中的一个或多个,前束角控制系统可被配置为自动切换到第二模式。然而,在其他实施例中,基于运行模式的触发条件也可包括进一步的要求,其中至少一些要求可与风力涡轮机的运行模式或生产状态不直接相关。
5、例如,基于运行模式的触发条件可以附加地包括与风速有关的要求,这可导致前束角控制系统仅在一定的风况下被切换到第二模式。在这种情况下,前束角控制系统可被配置为计算或接收测量到的或估计的风速,将测量到的或估计的风速与风速阈值进行比较,并仅在已超过风速阈值情况下切换到第二模式。在一个具体的示例中,风速阈值可等于风力涡轮机的切出速度。然而,在其他实施例中,可设置更高的风速阈值。
6、替代性地或此外,基于运行模式的触发条件可包括与单个的转子机舱组合体的运行状态有关的一个或多个要求。例如,转子机舱组合体的运行状态的要求可包括以下中的任一项或多项:对于转子机舱组合体中的至少一个来说,电力输出已下降到阈值水平以下,转子速度已下降到阈值水平以下,转子已停止并且叶片已被顺桨而超过阈值位置。在这种情况下,前束角控制系统可被配置为仅在一个或多个转子机舱组合体已满足一定的预定运行标准的情况下才切换到第二模式,或者只对满足了一定的预定运行标准的转子机舱组合体应用第二模式。
7、前束角控制系统可被配置为当在第一模式下运行时保持转子机舱组合体的至少基本恒定的前束角。通过这种方式,前束角控制系统可具有尤其简单和可靠的设计。然而,控制系统也可被配置成当前束角控制系统在第一模式下运行时,通过转子机舱组合体的偏航系统进行偏航角调整,例如,响应于风向的快速变化。
8、前束角控制系统可被配置为当在第一模式下运行时保持转子机舱组合体的至少2度的正前束角,优选是处于2度至8度的范围内的前束角。在一个具体实施例中,前束角控制系统可被配置为当在第一模式下运行时保持约6度的正前束角,但其他数值也是可行的。
9、前束角控制系统可被配置为当在第二模式下运行时保持转子机舱组合体的约为0度的至少基本恒定的前束角。应理解的是,0度的前束角也对应于0度的偏航误差(前提是支撑装置已经与盛行风向对准)。一般来说,一旦前束角控制系统已被切换到第二模式,每个转子机舱组合体的前束角尽可能接近0度是有利的,以便为每个转子机舱组合体保持尽可能接近0度的偏航误差,从而使风力涡轮机组的负载最小化。然而,应理解的是,小的正前束角或负前束角仍然可以存在,例如,处于-1度至1度的范围内的前束角。
10、当在第二模式下运行时,前束角控制系统可被配置为保持每个转子机舱组合体的前束角小于前束角控制系统在第一模式下运行时所允许的最低前束角。
11、在一些实施例中,当前束角控制系统在第一前束角控制模式和/或第二前束角控制模式下运行时,转子机舱组合体的偏航系统可由锁定系统锁定,以确保转子机舱组合体不偏离预期的前束角。
12、前束角控制系统可包括定义多个前束角参考值的至少一个数据结构,如查找表,并可被配置为依据风力涡轮机的运行模式(以及可选地进一步依据附加的要求)为转子机舱组合体中的每一个选择前束角参考值。前束角参考值可以相对于支撑装置的平面来定义,或者替代性地相对于默认的偏航位置来定义,例如相对于风力涡轮机在主要生产模式下运行时所采用的偏航位置。控制系统可被配置为将选定的前束角参考值转发给相应的转子机舱组合体的偏航系统的偏航致动器,该偏航致动器可使用闭环控制将转子机舱组合体保持处于要求的前束角。
13、风力涡轮机还可包括中央偏航系统(除了转子机舱组合体的单独的偏航系统以外),该中央偏航系统被配置为改变支撑装置相对于风力涡轮机的底座的偏航角。中央偏航系统可以是主动系统或被动系统。
14、中央偏航系统可以是被用于使转子机舱组合体与盛行风向对准的主要偏航系统。在这种情况下,当前束角控制系统进入第二模式时,转子机舱组合体的单独的偏航系统可主要用于减小转子机舱组合体相对于支撑装置的前束角。然而,如上所述,转子机舱组合体的单独的偏航系统也能够执行附加的偏航角调整,例如响应于风向的快速变化。
15、应理解的是,本发明可被应用于许多不同类型和配置的多转子风力涡轮机。例如,风力涡轮机可以是陆上风力涡轮机或海上风力涡轮机,并可包括任何适当数量的转子机舱组合体,例如2、4、6或更多个。在一个具体实施例中,转子机舱组合体可以通过一个或多个共同的支撑结构被安装到塔架上,每个共同的支撑结构包括从风力涡轮机的塔架沿相反的大致水平的方向向外延伸的一对臂,但其他配置也是可行的。
16、本发明的另一方面提供了一种运行多转子风力涡轮机的方法,该多转子风力涡轮机包括通过相应的偏航系统被安装在支撑装置上的至少两个转子机舱组合体,该方法包括:使风力涡轮机在主要生产模式下运行,在主要生产模式下转子机舱组合体被用于发电;当风力涡轮机在主要生产模式下运行时,将转子机舱组合体保持处于正前束角;监测风力涡轮机的运行模式;以及依据基于运行模式的触发条件被满足,运行转子机舱组合体的偏航系统以减小转子机舱组合体的前束角。
17、该方法总体上可包括与上述多转子风力涡轮机的正常运行有关的任何步骤。
- 还没有人留言评论。精彩留言会获得点赞!