用于监视风力涡轮机的转子的锁定状态的时间段的监视系统和方法以及风力涡轮机与流程
用于监视风力涡轮机的转子的锁定状态的时间段的监视系统和方法以及风力涡轮机
1.本发明涉及一种用于监视风力涡轮机(turbine)的转子(rotor)的锁定状态的时间段的监视系统、一种包括监视系统的风力涡轮机、以及一种用于监视风力涡轮机的转子的锁定状态的时间段的方法。
2.必须对诸如轴承和齿轮之类的风力涡轮机的传动系(drive train)的部件进行锻炼(exercise),即,旋转,以防止在其上的停顿痕迹(standstill mark)。这样的停顿痕迹最终可以导致这样的部件失效。
3.然而,在风力涡轮机,特别是传动系处的某些维护任务期间,必须锁定传动系,使得防止旋转以保护执行维护任务的技术人员免受由部件旋转引起的潜在危险。
4.因此,在维护任务期间,传动系被锁定并且存在发展停顿痕迹的风险。风险随着转子的锁定时间而明显增加。为了避免停顿痕迹,因此已知对锁定传动系的转子的时段或换言之对转子的锁定状态施加时间限制。这样的时间限制可能在几个小时的范围内。
5.然而,如果维护任务花费比时间限制长的时间,则由于停顿痕迹的增加的风险而在维护任务可以继续之前需要暂停维护任务并转动转子。然而,维护任务的暂停和转子的转动是麻烦的。
6.减少风力涡轮机中的负载的其他方法是已知的。us 2012/146333a1提出了一种用于减少风力电力单元在停放或空隙条件下的动态负载的系统。该系统被配置为响应于由传感器感测到的参数指示的动态负载信号而产生制动信号。制动系统响应于制动信号执行减小的扭矩制动模式以通过允许制动系统的间歇打滑来减小风力电力单元的动态负载。关于另外的现有技术,参考us 2020/232446a1、us 2008/181761a1、ep3073109a1和us2010/194114a1。
7.此外,即使采用上述预防措施,也只能降低而不能消除归因于转子的锁定的传动系的损坏的风险。
8.因此,本发明的目的是以归因于停顿痕迹的传动系的损坏的较低风险使能需要锁定风力涡轮机的传动系的转子的维护任务,而仍应以对于维护任务的长持续时间而言尽可能小的中断来执行维护任务。
9.该目的通过权利要求的主题解决。特别地,该目的通过根据权利要求1的用于监视风力涡轮机的转子的锁定状态的时间段的监视系统、根据权利要求8的风力涡轮机和根据权利要求12的用于监视风力涡轮机的转子的锁定状态的时间段的方法来解决。本发明的进一步细节从其他权利要求以及说明书和附图展开。因此,结合本发明的监视系统描述的特征和细节结合本发明的风力涡轮机和本发明的方法应用,使得关于本发明的各个方面的公开是或可以是互相参考的。
10.根据本发明的第一方面,该目的通过用于监视风力涡轮机的转子的锁定状态的时间段的监视系统来解决,由此该监视系统包括至少一个运动传感器和至少一个计算单元,其中计算单元被配置为从至少一个运动传感器接收至少一个运动测量,并且其中计算单元被配置为确定转子可以保持在锁定状态还是转子应该基于至少一个运动测量而被解锁。
11.因此,本发明提供了一种能够检测风力涡轮机的运动的监视系统。运动特别可以是振动和/或振荡的形式。因此,被配置为检测风力涡轮机的运动的运动传感器可以是振动传感器和/或振荡传感器并且运动测量可以是振动测量和/或振荡测量。
12.基于检测到的运动,计算单元确定,特别是通过计算,转子保持在锁定状态,即,保持锁定时的停顿痕迹的风险。只要测量到的运动小,形成停顿痕迹的风险就低,并且计算单元可以确定转子可以保持在锁定状态。转子的锁定状态可以是针对允许在风力涡轮机处执行维护任务的安全措施。技术人员执行的维护任务可能因此在确定转子可能保持在锁定状态期间继续。
13.然而,如果测量到的运动高,则形成停顿痕迹的风险也高,并且计算单元可以基于至少一个运动测量来确定应该解锁转子。因此,当转子被解锁时,它可以被转动以随后继续维护任务,或者如果运动非常高,则维护任务可能需要暂停或推迟。计算单元可以被配置为在需要转动转子以继续维护任务或需要暂停或推迟维护任务的此类确定之间进行区分。这样,当确定转子应该被解锁时,这些确定可以是子(sub)确定。
14.因此,本发明将风力涡轮机的运动考虑为比现有技术中先前已经考虑的时间更进一步的风险因素。由此,如下是可能的:显著降低传动系由于停顿痕迹而损坏的风险,因为该风险相比于时间与由于风力涡轮机周围的环境条件而经历的风力涡轮机,特别是传动系的运动更相关。因此,当环境条件良好并且相应地测量到的运动小时,可以完全不中断地并且持续非常长的持续时间地执行维护任务。
15.显然,监视系统可配置为通过连续测量风力涡轮机的运动,特别是传动系的至少一个部件或多个部件的运动来连续监视转子的锁定状态。然后,计算单元连续地从至少一个运动传感器接收运动测量值并且可以取决于环境条件基于运动测量连续地确定转子可以保持在锁定状态还是转子应该被解锁。因此,可以快速注意到导致较大运动的环境条件的改变。因此,可以通过计算单元快速确定转子应该被解锁以防止对风力涡轮机的传动系的任何损坏。
16.该确定可以基于至少一个运动测量和预定阈值的比较。阈值可以被预先确定,使得它的超过,即,当至少一个运动测量超过它时,虑及确定转子因为传动系的部件上的停顿痕迹的增加的风险而应该被解锁。只要至少一个运动测量值低于预定阈值,就可替代地确定转子可以保持在锁定状态。
17.预定阈值可以基于对风力涡轮机的受损传动系和导致传动系故障的时间段内的至少一个运动传感器的至少一个测量的研究。因此,预定阈值是基于先前的经验的并且因此可以非常准确地预先确定。与所研究的传动系的故障时的经验运动相比,实际预定的阈值可以配备有安全缓冲器(buffer)。替代地或附加地,预定阈值可以基于风力涡轮机的传动系的计算机模拟。
18.此外,如果存在多于一个的运动传感器,则可以将运动传感器中的每一个的运动测量中的每一个与针对运动传感器中的每一个的一个预定阈值或不同的预定阈值进行比较。替代地,预定阈值可以是代表多个运动传感器的所有运动测量的值,诸如测量的运动的平均值。
19.此外,预定阈值可以基于至少一个运动测量和指定时间段。因此,该确定可以基于由环境条件引起的风力涡轮机的运动和维护工作的持续时间两者。因此,计算单元关于转
子可以保持在锁定状态还是转子应该被解锁的确定可以不仅基于至少一个运动测量而且基于锁定状态的时间段的指定时间段。从而甚至可以进一步降低停顿痕迹的风险。例如,预定阈值可以具有运动阈值和时间阈值的格式。当达到或超过这些中的任何一个时,计算单元可以相应地确定转子应该被解锁。替代地,预定阈值可以包括考虑运动和时间两者的运动阈值和时间阈值。
20.根据本发明,监视系统还包括被配置用于基于计算单元的确定输出一个或多个信号。信号可以被配置为用于执行维护任务的技术人员的信号。由此,技术人员可以容易地获知关于计算单元的确定,即,警告停顿痕迹的风险增加并建议解锁转子或接收基于计算单元执行的确定的转子可以保持锁定状态的反馈。因此,出于安全原因,技术人员仍然可以自行决定转子是保持锁定还是解锁。技术人员可以根据确定操作用于锁定转子的锁定控制单元。然而,替代地或者在风险增加的情况下,还可以预期监视系统或计算单元可操作地连接到锁定控制单元。在该情况下,监视系统可以操作锁定控制单元,例如,在向技术人员输出一个或多个信号之后的预定时间之后解锁转子,所述一个或多个信号可能包含转子将被解锁的警告。
21.此外,信令系统可以被配置用于基于计算单元的确定输出三个不同信号之一。一个信号可以是绿色信号或ok信号。当确定转子可以保持在锁定状态时,可以发出(putout)该信号。另一个信号可以是红色信号或警告信号。当确定转子应该被解锁时,可以发出该信号。三个信号中的另一个可以是黄色信号或提醒(caution)信号。该信号可以在计算单元的另外的确定在转子可以保持在锁定状态还是转子应该解锁的确定之间中被发出。例如,当连续的运动测量尚未超过预定阈值但测量到的运动变得较大时,可以发出黄色信号或提醒信号以通知技术人员可能很快需要解锁转子并且可能需要中断维护工作。
22.信令系统可以被配置为使得信号是视觉的和/或听觉的。因此,信令系统可以包括作为信号输出单元的警报器、屏幕和/或灯,以便输出信号。优选地,信号被发出在多个上述信号输出单元上,使得对于技术人员而言更功能注意到。一个或多个信号可以预定的时间间隔发出,预定的时间间隔例如在5分钟到15分钟的范围内。
23.至少一个运动传感器可以是加速度计。加速度计测量风力涡轮机的,即,它的结构并且更具体地是风力涡轮机的一个或多个部件的加速度。加速度计可能是例如mems加速度计。mems加速度计具有低噪声、对重复的高冲击(shock)的高抵抗和对高温差的高度不敏感。
24.根据本发明的第二方面,该目的通过包括根据本发明的第一方面的监视系统的风力涡轮机来解决。
25.至少一个运动传感器可以被提供在风力涡轮机的传动系的部件处。因此,可以直接在经历运动的传动系的部件处测量运动,即,例如,振动和/或振荡,使得可以从直接在部件本身处执行的测量推断出在部件处的停顿痕迹的发展的风险。特别地,至少一个运动传感器可以被提供在,特别是附接到机械传动系的部件,诸如轴承或齿轮箱。已经发现传动系的上述部件最容易遭受停顿痕迹。
26.至少一个运动传感器可以附接到传动系的部件。特别地,至少一个运动传感器可以嵌入容器中并固定到传动系的部件以测量其运动,即,例如,振荡和/或振动。容器可以是双轴或三轴容器。可以通过检测频率差来实现振动测量。
27.此外,监视系统可以包括被提供在风力涡轮机的传动系的不同部件处的多个运动传感器。特别地,运动传感器可以被提供在驱动轴和齿轮箱的轴承中的每一个或至少一个处。传动系的不同部件处的运动的测量使能对相应部件处的停顿痕迹的风险的本地确定。由此,它增加了在停顿痕迹的发展之前确定的停顿痕迹的高风险的可能性。在这方面,每个部件或运动传感器可以具有其自己的预定阈值。
28.至少一个运动传感器可以来自风力涡轮机的风力涡轮机控制系统。风力涡轮机控制系统被配置用于控制风力涡轮机的操作并且因此已经通过运动传感器确定运动,运动传感器特别是附接到传动系的部件的加速度计。这样,用于监视系统的至少一个运动传感器已经包含在风力涡轮机中,这节省了在现有风力涡轮机和新风力涡轮机中实施监视系统的成本。
29.风力涡轮机的转子的锁定,即,锁定状态,可以通过风力涡轮机的锁定系统的至少一个锁定单元来实现。至少一个锁定单元可以是制动器或至少一个锁定销和传动系中的相应销插入孔的形式,例如,在齿轮箱中,例如,当使用传动系的齿轮拓扑时。可以提供锁定系统的锁定控制单元用于控制风力涡轮机的转子的一个或多个锁定单元,即,用于锁定和解锁转子。在锁定状态下,转子不能转动。在解锁状态下,转子可以自由转动。
30.根据本发明的第三方面,该目的通过一种用于监视风力涡轮机的转子的锁定状态的时间段的方法来解决,由此该方法包括以下步骤:
31.测量风力涡轮机的至少一个运动,并且基于该至少一个测量到的运动来确定转子可以保持在锁定状态还是转子应该被解锁。
32.该方法可以特别地被配置为通过根据本发明的第一方面的监视系统来执行。因此,可以借助于监视系统的至少一个运动传感器来测量风力涡轮机的至少一种运动,其具体可以是振动和/或振荡。此外,可以借助于监视系统的计算单元来执行基于至少一个测量到的运动的转子可以保持在锁定状态还是转子应该被解锁的确定。
33.根据本发明,该方法包括基于该确定输出一个信号或多个信号的另外的步骤。为此,可以使用之前关于监视系统描述的信令系统。
34.最后,该方法可以包括以下的另外的步骤:在基于至少一个测量到的运动确定转子应该被解锁时,在被监视的时间段内解锁被锁定的转子。如前所述,该步骤可由技术人员在接收到一个或多个信号后执行,或通过控制锁定控制单元的监视系统或计算单元自动执行。
35.本发明的另外的优势、特征和细节从以下描述中展开,其中参考附图图1至图4详细描述了本发明的实施例。因此,来自权利要求的特征以及说明书中提到的特征单独地或以任意组合对于本发明来说是必要的。在附图中,示意性地示出了:
36.图1关于风力涡轮机的侧视图,
37.图2穿过短舱(nacelle)以及关于图1的风力涡轮机的短舱内的传动系的截面图,
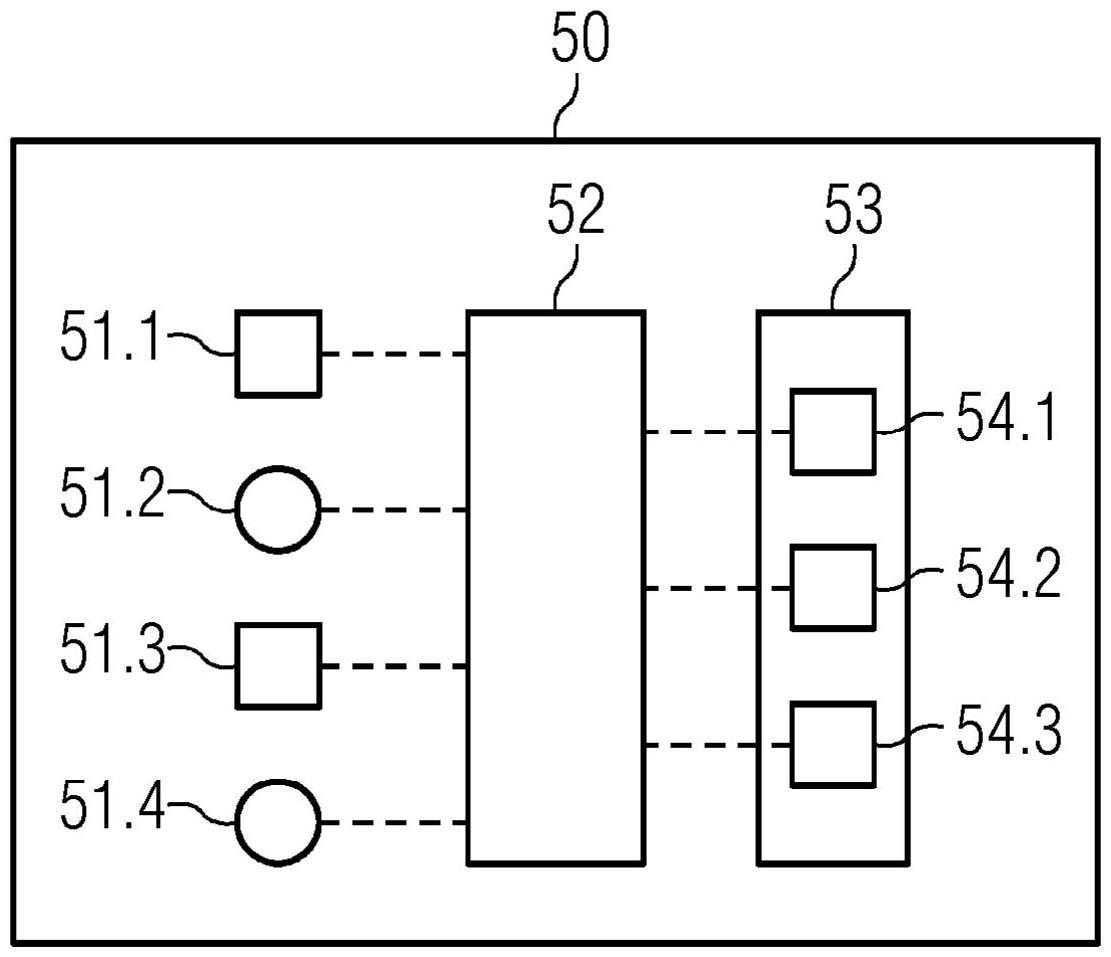
38.图3图1和2的风力涡轮机的监视系统的图示,以及
39.图4用于监视图1和2的风力涡轮机的转子的锁定状态的时间段的方法的图示。
40.图1至图4中相同的对象以相同的参考编号命名。如果一幅图中有不止一个同类毒蝎,则通过点将对象的升序编号与其参考编号分离以升序对同类对象编号。
41.图1示出了关于风力涡轮机1的侧视图。风力涡轮机1包括支撑塔20和安装在支撑
塔20上的短舱30。短舱30包含风力涡轮机1的传动系10,如图2中的短舱30的截面图中所示。传动系10的转子60被提供在短舱30的外部。转子60由叶毂(hub)11组成,叶毂11具有附接到其的两个转子叶片(blade)40.1、40.2。然而,转子叶片40的数量可替代地多于两个,诸如例如三个。
42.图2示出了穿过图1的风力涡轮机1的短舱30和关于短舱30内的传动系10的截面图。短舱30包括主框架31。传动系10被支撑在短舱的主框架31上。传动系10的拓扑在图2中是齿轮传动的(gear),但替代地也可以是直接驱动类型。
43.机械传动系10包括多个部件11、12、13.1、13.2、14、15、16、17。这些是叶毂11、具有其主轴承13.1、13.2的驱动轴12、齿轮箱14和发电机16。发电机16经由配备有制动器17的发电机轴15连接到齿轮箱14。制动器17是锁定系统的锁定单元,该锁定系统具有锁定控制单元(未示出),用于将发电机轴15锁定就位并且由此锁定驱动轴12和转子60。当转子60被锁定,即处于锁定状态时,转子60不能转动。
44.转子60可替代地或附加地由锁定单元锁定,锁定单元由一个多个锁定销(未示出)组成。通过在齿轮箱14的任一侧插入一个或多个锁定销。这可能比制动器17优选,因为基于摩擦的制动器17应该只在有限的程度上被信任。锁定单元可以在传动系10的高速或低速部分上。
45.如可以从图2进一步得出,短舱30的振荡由多个运动传感器51.1、51.2、51.3、51.4测量。这些运动传感器51.1、51.2、51.3、51.4被配置为加速度计并且是风力涡轮机控制系统(未示出)的部分。风力涡轮机控制系统被配置用于间接监视转子60的条件。为此使用的测量是与驱动轴12相关的横向(transverse)和轴向短舱振荡。图2在这方面示出了运动传感器51.1、51.2、51.3、51.4的示例性配置,用于测量水平轴风力涡轮机1的短舱振荡。
46.因为转子引起的短舱振荡频率相当低(通常从0.1hz到10hz),所以运动传感器51.1、51.2、51.3、51.4被配置为能够在0hz(dc)到大约20hz的最大值的带宽内进行测量。
47.短舱可以执行与转子条件监视和故障预测相关的三种振荡模式:横向于转子轴、与转子轴成一直线以及绕竖直塔轴的扭转(torsion)。为了监视这些振荡,需要三个运动传感器51。运动传感器51.3在轴向(与转子轴线相关)上敏感。运动传感器51.2、51.4在转子轴的横向方向上敏感。运动传感器51.1是感应式距离传感器。当转子叶片40之一处于竖直直立位置时,该传感器给出转子60的绝对位置的参考信号。需要转子60的位置信息来计算相位信息,这有助于检测转子60的故障质量不平衡和空气动力学不对称性。
48.图3现在示出了将在图1和2的风力涡轮机中使用的监视系统50的示意性表示。监视系统50可被提供在风力涡轮机1处或风力涡轮机1外部的任何所需位置处。然而,用于如图2中所示的监视系统50的运动传感器51.1、51.2、51.3、51.4显然必须位于传动系10处并且在该情况下已经存在于风力涡轮机1中用于风力涡轮机控制系统。此外,信令系统53及其信令单元54.1、54.2、54.3也应该存在于风力涡轮机1本身中,例如短舱30内部。
49.监视系统50的计算单元52无线地或经由线缆与运动传感器51.1、51.2、51.3、51.4以及与信令系统53连接。
50.图4示出了用于通过图3的监视系统50监视风力涡轮机1的转子60的锁定状态的时间段的方法100的示意表示。
51.根据方法100,第一方法步骤101是运动传感器51.1、51.2、51.3、51.4不断地测量
转子60在传动系10处的不同位置处的振荡并将它们传输到计算单元52。
52.计算单元52在存储单元(未示出)中包含用于运动传感器51.1、51.2、51.3、51.4中的每一个的测量振荡的一个或多个预定阈值。在第二方法步骤102中,计算单元52将一个或多个预定阈值与从运动传感器51.1、51.2、51.3、51.4接收的测量值进行比较。由此确定转子60可以保持在锁定状态还是转子60应该被解锁。因为测量到的振荡取决于风力涡轮机1周围的环境条件,所以测量到的振荡与传动系10处的停顿痕迹的风险相关,要避免这种风险以降低风力涡轮机1的传动系10的部件11、12、13.1、13.2、14、15、16、17之一的故障的风险。
53.在第三方法步骤103中,信令系统53由计算单元52基于转子60是否可以保持在锁定状态的确定来控制。信令单元54.1是警报器,信令单元54.2是屏幕,并且信令单元54.3是灯。因此,当确定转子60应该被解锁时,警报器可以被打开,屏幕可以显示转子60应该被解锁和转动的通知,并且灯可以变成红色,例如。否则,当确定转子60可以保持锁定状态时,可以关闭警报器,屏幕可以显示执行维护工作是安全的的通知并且灯可以根据计算单元52的控制变成绿色。
54.锁定方法200与监视转子60的锁定状态的时间段的方法100并行运行。在第一锁定方法步骤201中,转子60通过锁定单元17被锁定。该步骤可有从方法100获益,因为计算单元52可以确定锁定转子60是否安全。
55.在转子60锁定之后,在第二锁定方法步骤202中,技术人员对风力涡轮机1执行维护工作。然而,当第三方法步骤103确定转子60应被解锁时,根据箭头300,其可参考信令系统52的信令,转子60在第三锁定方法步骤203中被解锁并转动。替代地,箭头300可以指自动解锁转子60、转动它并再次锁定转子60的锁定控制单元的监视系统50的控制。然而,这种可选的控制和操作可以在被执行之前经由信令系统53向技术人员信号通知,使得可以确保技术人员的安全。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1