用于控制风力涡轮的系统和方法与流程
本发明一般涉及电功率生成,并且更特定地涉及用于经由预测控制来控制风力涡轮的系统和方法。
背景技术:
1、风功率通常被认为是目前可用的最清洁、对环境最友好的能源之一。为此,风力涡轮在这方面已获得越来越多的关注。现代风力涡轮通常包括塔架、发电机、齿轮箱、机舱以及一个或多个转子叶片。机舱包括耦合到齿轮箱和发电机的转子组合件。转子组合件和齿轮箱安装在位于机舱内的底板支撑框架上。转子叶片使用已知的翼型件原理捕获风的动能。转子叶片以旋转能的形式传递动能,以便转动将转子叶片耦合到齿轮箱的轴,或者如果不使用齿轮箱,则直接耦合到发电机。发电机然后将机械能转换为电能,并且电能可以被传输到容纳在塔架内的转换器和/或变压器,并且随后被部署到公用电网。现代风功率生成系统通常采用具有多个风力涡轮发电机的风电场的形式,所述风力涡轮发电机可操作以向向功率电网提供功率的传输系统供应功率。
2、当前的风力涡轮控制通常使用发电机扭矩和叶片桨距致动器(blade pitchactuator)以便通过各种风力条件和/或故障情况将机械负载保持在设计限制以下。在正常操作中,最基本的控制功能是要根据规定的调度调节功率和转子速度。这些调度通常取决于影响风力涡轮的风速。在更低的风速下,转子速度可由扭矩调节,而叶片可定向成捕获最多的风功率。在更高的风速下,可以通过使叶片变桨远离风来将转子速度调节到其额定值。此外,功率可由发电机扭矩调节。
3、除了最基本的控制功能之外,当前的风力涡轮控制还可包括多种功能性或控制回路,这些功能性或控制回路减轻由于突然的阵风、增大的风切变和/或系统中的故障引起的负载。这些保护回路/方案可由异相循环桨距、快速变桨(例如远离风的快速变桨以限制负载)和/或迎风和逆风交替变桨组成。对于调节控制回路/方案和/或触发保护回路所要求的实时数据可以例如使用基于简化涡轮模型的估计技术(例如卡尔曼过滤器)获得。简化涡轮模型的复杂性可能受已知工业控制平台的计算限制所限制。
4、然而,利用简化模型来获得数据可能会限制控制器以最优方式操作风力涡轮的能力。例如,通常在涡轮估计/控制中采用的简化模型过于简单,并且可能无法提供对影响风力涡轮的结构和/或风的状态的准确可见性。这可能导致因保守而次优的涡轮控制。作为附加示例,负载减轻方案/回路中的许多彼此独立设计,其中每个回路/方案发送桨距命令。因此,桨距系统可能会经历不必要的磨损,并且容易受到由速率饱和所导致的不稳定性的影响。此外,保护环路/方案的增加的数量可能会产生复杂的动态交互,这可能导致控制器的调谐困难,并且从而导致次优性能。此外,保护回路/方案可通过选择替代近似来间接处置涡轮约束,该替代近似存在导致次优性能的保守操作或关键约束违反的风险。作为进一步的示例,通常采用的简化模型可能不适于对现代风力涡轮的更灵活结构的增加的动态耦合进行建模。
5、因此,本领域一直在寻求解决上述问题的新的和改进的系统和方法。因此,本公开涉及控制风力涡轮的系统和方法。
技术实现思路
1、本发明的方面和优点将在以下描述中部分地阐述,或可从描述中明白,或可通过本发明的实践来学习。
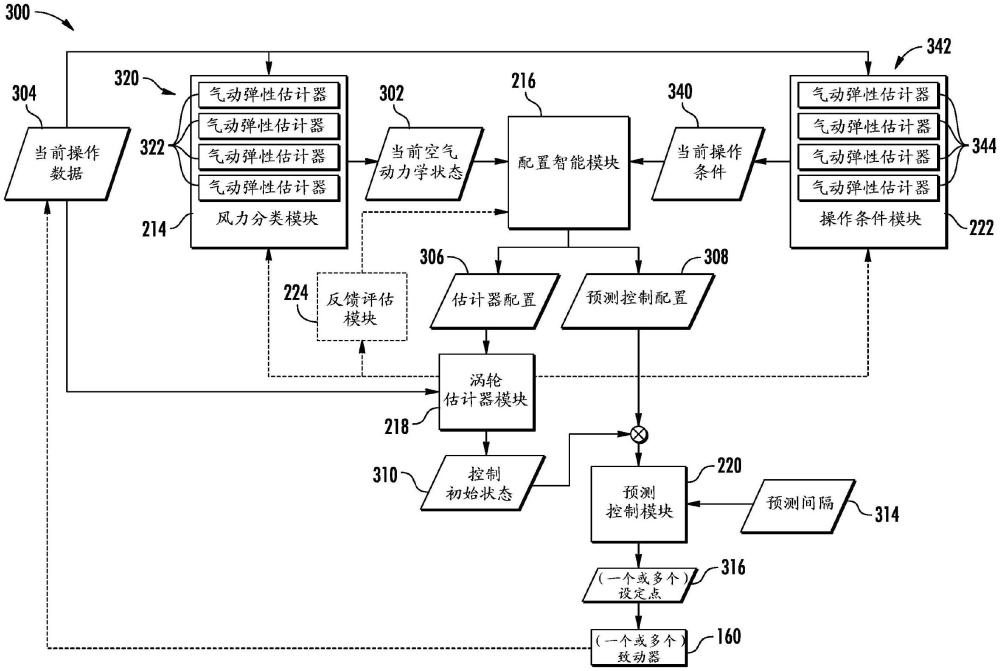
2、在一方面中,本公开涉及一种用于控制风力涡轮的方法。该方法可包括经由控制器的风力分类模块至少部分基于指示风力涡轮的当前操作的风力涡轮的当前操作数据集合来确定风力资源的当前空气动力学状态。控制器的配置智能模块可用于至少部分基于当前空气动力学状态来生成用于涡轮估计器模块的估计器配置。控制器的涡轮估计器模块可以仿真风力涡轮的操作,以便生成用于预测控制模块的控制初始状态。控制初始状态可包括风力涡轮的多个组件的所建模的当前操作状态。该方法还可包括经由配置智能模块至少部分基于当前空气动力学状态生成用于预测控制模块的预测控制配置。预测控制模块可用于基于控制初始状态和预测控制配置来确定预测间隔内的风力涡轮的所预测性能。预测控制模块还可用于基于所预测性能生成用于风力涡轮的至少一个致动器的设定点。此外,该方法可包括根据设定点经由(一个或多个)致动器影响风力涡轮的操作状态。
3、参考以下描述和所附权利要求,本发明的这些和其他特征、方面和优点将变得更好理解。并入本说明书并且构成本说明书的一部分的附图图示本发明的实施例,并且与该描述一起用于解释本发明的原理。
技术特征:
1.一种用于控制风力涡轮的方法,所述风力涡轮包括控制器,所述方法包括:
2.根据权利要求1所述的方法,其中,所述风力分类模块包括第一多个气动弹性估计器,其中每个气动弹性估计器被调谐到不同假定风力条件,并且其中确定所述当前空气动力学状态还包括:
3.根据权利要求2所述的方法,其中,确定所述多个风力描述性参数的所述指定部分包括:
4.根据权利要求3所述的方法,其中,确定所述多个风力描述性参数的所述指定部分还包括:
5.根据权利要求2所述的方法,其中,所述第一多个气动弹性估计器中的每个气动弹性估计器包括至少一个气动弹性模型和至少一个过滤算法,其中每个气动弹性估计器的所述至少一个气动弹性模型被配置成将所述风力涡轮的行为建模为柔性结构的多体系统,并且其中生成所述多个风力描述性参数还包括:
6.根据权利要求2所述的方法,其中,生成所述估计器配置和所述预测控制配置还包括:
7.根据权利要求6所述的方法,其中,生成所述估计器配置和所述预测控制配置还包括:
8.根据权利要求7所述的方法,其中,所述操作条件模块包括第二多个气动弹性估计器,其中每个气动弹性估计器被调谐到所述风力涡轮的不同假定故障条件,并且其中确定所述当前操作条件还包括:
9.根据权利要求8所述的方法,其中,确定所述多个描述性操作参数的所述指定部分包括:
10.根据权利要求8所述的方法,其中,所述第二多个气动弹性估计器中的每个气动弹性估计器包括至少一个气动弹性模型和至少一个过滤算法,其中每个气动弹性估计器的所述至少一个气动弹性模型被配置成将所述风力涡轮的行为建模为柔性结构的多体系统。
11.根据权利要求8所述的方法,其中,选择所述多个增益调谐的所述增益调谐还包括:经由所述配置智能模块,基于所述当前空气动力学状态和所述当前操作条件选择所述增益调谐,其中每个增益调谐被配置成基于所述风力资源的所述当前空气动力学状态和所述风力涡轮的所述当前操作条件修改所述估计器配置和所述预测控制配置中的至少一个。
12.根据权利要求11所述的方法,其中,选择所述多个增益调谐的所述增益调谐还包括:
13.根据权利要求12所述的方法,其中,选择所述多个增益调谐的所述增益调谐还包括:
14.根据权利要求6所述的方法,生成所述估计器配置和所述预测控制配置还包括:
15.根据权利要求6所述的方法,其中,所述估计器配置至少包括过程噪声增益和传感器噪声增益。
16.根据权利要求6所述的方法,其中,所述预测控制配置至少包括对应于跟踪权重、松弛权重和约束限制的增益。
17.根据权利要求6所述的方法,还包括:
18.根据权利要求17所述的方法,其中,实现所述多个并行计算还包括:
19.根据权利要求8所述的方法,还包括:
20.根据权利要求8所述的方法,其中,模拟所述风力涡轮的所述操作还包括:
技术总结
提供了用于控制风力涡轮的系统和方法。因此,控制器的风力分类模块至少部分基于风力涡轮的当前操作数据集合来确定风力资源的当前空气动力学状态。当前操作数据集合指示风力涡轮的当前操作。控制器的配置智能模块然后至少部分基于当前空气动力学状态来生成用于涡轮估计器模块的估计配置和用于预测控制模块的预测控制配置。经由涡轮估计器模块仿真风力涡轮的操作,以生成用于预测控制模块的控制初始状态。预测控制模块然后基于控制初始状态和预测控制配置来确定在预测间隔内的风力涡轮的预测性能。预测控制模块基于预测性能生成风力涡轮的至少一个致动器的设定点,并且风力涡轮的操作状态根据设定点经由至少一个致动器而被影响。
技术研发人员:F·J·达马托,H·K·阿钱塔,M·阿巴斯扎德,K·辛加尔,M·T·多库库,付旭
受保护的技术使用者:通用电气可再生能源西班牙有限公司
技术研发日:
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!