一种压缩天然气汽车的气轨压力控制方法、系统及车辆与流程
1.本发明涉及汽车控制技术领域,特别涉及一种基于罐装天然气作为燃料的汽车的气轨压力控制方法、系统。
背景技术:
2.对于压缩天然气(cng)汽车车来说,调压阀的功能是把从气瓶中出来的天然气压力降到正常工作所需的压力水平,同时保持压力稳定。
3.现有的技术方案多为采用机械式调压阀控制气轨压力,当调压阀开启,若系统中需要的天然气增加,调压阀低压腔内压力下架,直到节流孔打开为增加的天然气流量而重新建立等天然气压力的程度;当低压腔内的天然气压力值超过设定值时,由于没有流出的天然气进入系统,所以节流孔完全关闭。
4.机械式调压阀的局限性在于:增加和减少流量时会发生滞后现象;气轨压力由阀体决定,由于滞后原因可导致气轨压力不足或过压。
技术实现要素:
5.本发明采用电控调压阀调节气轨压力,在不同的发动机工况下,给定不同的气轨期望压力,引入前馈控制算法,通过控制电控调压阀开度,使气轨压力稳定在气轨期望压力附近较小范围波动。改善气轨压力不可调,以及由于滞后原因导致的气轨压力不足或过压。采用自学习算法,有效规避电控调压阀生产所致流量差异给气轨控制带来的不稳定性。其具体技术方案如下所述。
6.作为第一方面,本发明提供了一种压缩天然气汽车的气轨压力控制方法,所述步骤包括:
7.s1,点火开关上电,当判断燃料模式为燃气模式且转速为非0时,cngon调压阀控制模式激活且执行步骤s21;当判断燃料模式为燃油或转速为0且期望轨压减实际轨压的差值满足预设数值时,cngoff调压阀控制模式激活且执行步骤s31;
8.s21,根据转速和进气压获取预设的期望轨压值;
9.s22,在cngon调压阀控制模式下,选取根据发动机工况确定控制用的pwm信号的基础脉宽、脉宽对应的体积流量、进气压三个参数的其中之一;
10.s23,根据选取的参数获取cngon调压阀控制模式下的基础占空比,采用pid整定方式在期望轨压值与实际轨压值有非零差值时将基础占空比导入pid进行微调,得到pid闭环占空比,执行步骤s4;
11.s31,根据水温获取预设的期望轨压值;
12.s32,获取cngoff调压阀控制模式下的基础占空比为0,采用pid整定方式在期望轨压值与实际轨压值有非零差值时将基础占空比导入pid进行微调,得到pid闭环占空比,执行步骤s4;
13.s4,将基础占空比、pid闭环占空比、预设的流量控制量三者相加的和值根据电池
电压进行修正,修正后的占空比经最大、最小占空比限值后得到最终的输出占空比。
14.结合第一方面,在其可能发生的任意一种情况下的第一种情况为,s1中所述模式激活的激活条件如下:
15.cngon模式下控制无条件激活;
16.cngoff模式下控制激活:期望轨压值-实际轨压值》=标定阈值1;
17.cngoff模式下控制不激活:期望轨压值-实际轨压值《=标定阈值2。
18.结合上述第一种情况,在其可能发生的任意一种情况下的第二种情况为,
19.在s21的步骤中,所述的期望轨压值经修正,且通过低通滤波及预设的最大期望轨压值进行限值后得到最终的期望轨压值,其方法为:
20.根据转速和进气压获取预设的基础期望轨压值,判断电控调压阀压力偏移是否使能;
21.若使能,则基础期望轨压值再加上所述进气压值后乘以期望轨压修正系数进行修正;
22.若未使能,则基础期望轨压值乘以期望轨压修正系数进行修正;
23.将修正后的基础期望轨压值进行低通滤波得到基础期望轨压滤波值,基础期望轨压滤波值经过期望轨压最大限值进行限值后得到最终的期望轨压值;
24.在s31的步骤中,所述的期望轨压值的获取方法为:根据水温获取预设的原始期望轨压值,将原始期望轨压值进行低通滤波得到基础期望轨压滤波值,基础期望轨压滤波值经过期望轨压最大限值进行限值后得到最终的期望轨压值。
25.结合上述第二种情况,在其可能发生的任意一种情况下的第三种情况为,s23中所述的基础占空比为:
26.根据基础脉宽、脉宽对应的体积流量、进气压选取基础占空比,其中:
27.基础脉宽:基础占空比为根据转速和每缸cng质量设定的预设值,
28.脉宽对应的体积流量:基础占空比为由每缸质量转换为每缸体积,再根据转速和每缸体积设定的预设值,
29.进气压:基础占空比为根据转速和进气压设定的预设值;
30.根据燃气温度获取预设的燃气温度修正量;
31.根据期望压力获取预设的期望压力修正量;
32.基础占空比限值在[基础占空比*最小限值系数,基础占空比*最大限值系数]范围内;
[0033]
基础占空比加上燃气温度修正量和期望压力修正量,得到修正的基础占空比。
[0034]
结合上述第一方面或第一种至第三种的任意一种情况,在其可能发生的任意一种情况下的第四种情况为,s4所述流量控制量通过引入自学习单元进行学习后,获取自学习的流量控制量,其方法为:
[0035]
判断是否为怠速工况,若怠速时,则根据转速范围划定怠速时自学习单元格,计算单元格id;若非怠速时,则根据转速和进气压划定非怠速时自学习单元格,计算单元格id;
[0036]
判断是否具备进入自学习条件,其条件为:水温大于一定阈值,发动机运行时间大于一定阈值,电控调压阀输出占空比在一定范围内,期望轨压值在一定范围内,实际轨压值在一定范围内,电控调压阀无预设故障代码报出;
[0037]
进行自学习阶段自学习量计算,根据当前自学习单元格内调整i项调节量;对此时i项进行累加,取16次的平均值,若平均值大于学习步长的2倍或单元格内容小于该平均值,则将步长值加到单元格值上;若平均值小于学习步长的-2倍或单元格内容大于该平均值,则将步长值从单元格值上减去,最后将各单元格id的单元格值存入非易失区,即为自学习的流量控制量;
[0038]
进行非自学习阶段自学习量计算,若当前i项学习值大于自学习单元格值,则学习值减去步长,即为自学习的流量控制量;若当前i项学习值小于自学习单元格值,则学习值加上步长,即为自学习的流量控制量。
[0039]
结合上述第四种情况,在其可能发生的任意一种情况下的第五种情况为,所述方法中,当实际轨压值大于期望轨压值对应预设限值与进气压对应预设限值的限值之和时,输出占空比输出清0;当发动机启动、断油、实际轨压值大于期望轨压值的预设限值,输出占空比输出清0。
[0040]
作为第二方面,本发明公开了一种压缩天然气汽车的气轨压力控制系统,所述控制系统包括调压阀、计算机可读存储介质、处理器,其特征在于,
[0041]
调压阀,用于根据处理器的控制指令控制气轨轨压值;
[0042]
计算机可读存储介质,存储有一个或多个可实现权利要求1至5其中任意一个所述的一种方法的程序指令;
[0043]
处理器,用于读取计算机可读存储介质内的程序指令进行运算,根据运算结果下发控制指令。
[0044]
结合第二方面,在其可能发生的任意一种情况下的第六种情况为,所述控制系统还包括流量自学习系统,用于根据怠速工况进行学习单元格的划定,计算单元id,根据当前自学习单元格内调整i项调节量,通过第四种情况所述的方法得出自学习的流量控制量,供所述控制系统的处理器进行调用。
[0045]
作为第三方面,本发明提供了一种使用压缩天然气的车辆,所述车辆安装有所述的一种压缩天然气汽车的气轨压力控制系统。
[0046]
本发明的有益效果是:
[0047]
本发明可以在发动机稳态工况下,将气轨压力控制在期望压力
±
50kpa左右。并且由于引入了自学习算法,可以有效的规避掉由于调压阀的流量制造偏差带来的控制不稳定性。
附图说明
[0048]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。
[0049]
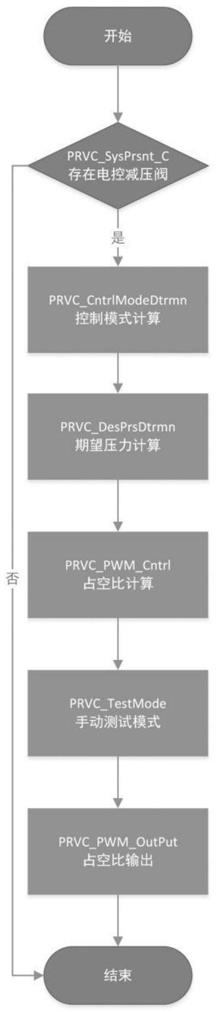
图1为本发明的方法流程图;
[0050]
图2为调压阀控制模式的逻辑流程图;
[0051]
图3为系统控制激活的逻辑流程图;
[0052]
图4为期望轨压值的逻辑流程图;
[0053]
图5为根据转速和进气压的查表示意图;
[0054]
图6为期望轨压修正系数根据水温和发动机运行时间的查表示意图;
[0055]
图7为原始期望轨压值根据水温的查表示意图;
[0056]
图8为基础占空比的逻辑流程图;
[0057]
图9为pid微调过程中的p项的查表示意图;
[0058]
图10为pid微调过程中的i项的查表示意图;
[0059]
图11为pid微调过程中的d项的查表示意图;
[0060]
图12为本发明的系统结构示意图。
具体实施方式
[0061]
下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。显然,所描述的实施例仅仅是本发明的部分实施例。
[0062]
如图1所示,本实施例公开了一种压缩天然气汽车的气轨压力控制方法,其大致方法流程如下所述:
[0063]
步骤1,根据发动机的燃料状态和运行工况决定调压阀控制模式:cngon、cngoff及cngdsbl。
[0064]
cngon模式:如图2所示,点火开关上电,判断燃料模式为燃气模式且转速为非0。控制激活。
[0065]
cngoff模式:点火开关上电,燃料模式为燃油或转速为0。当期望轨压大于实际轨压一定值时,控制激活;当期望轨压值小于实际轨压值一定值时,控制不激活。
[0066]
如图3所示,其控制激活的激活条件如下:
[0067]
cngon模式下控制无条件激活。
[0068]
cngoff模式下控制激活:期望轨压值-实际轨压值》=标定阈值1。
[0069]
cngoff模式下控制不激活:期望轨压值-实际轨压值《=标定阈值2。
[0070]
即cngoff模式下是否激活需要参考标定阈值。
[0071]
cngdsbl模式:点火开关掉电,控制不激活。
[0072]
步骤2,在不同的控制模式下,根据发动机工况和需要确定期望的气轨压力(期望轨压值),此为调压阀控制目标。
[0073]
调压阀控制模式为cngon模式时,提供一个标定参数,当该标定参数置位时,基础期望轨压值为转速和进气压之和;当该标定参数复位时,基础期望轨压值为根据水温得到的查表值。
[0074]
调压阀控制模式为cngoff模式时,基础期望轨压值为根据水温得到的查表值。
[0075]
如图4所示,以上两种模式的基础期望轨压值经低通滤波、最大期望轨压限制后得到最终的期望轨压值。
[0076]
cngon模式:如图5所示,根据转速和进气压查表获取基础期望轨压值。判断电控调压阀压力偏移是否使能。
[0077]
若使能,则基础期望轨压值再加上所述进气压值后乘以期望轨压修正系数进行修正。
[0078]
若未使能,则基础期望轨压值乘以期望轨压修正系数进行修正。
[0079]
如图6所示,期望轨压修正系数根据水温和发动机运行时间查表获取。
[0080]
将修正后的基础期望轨压值进行低通滤波得到基础期望轨压滤波值,基础期望轨压滤波值经过期望轨压最大限值进行限值后得到最终的期望轨压值。
[0081]
cngoff模式:如图7所示,根据水温查表获取原始期望轨压值。将原始期望轨压值进行低通滤波得到基础期望轨压滤波值,基础期望轨压滤波值经过期望轨压最大限值进行限值后得到最终的期望轨压值。
[0082]
步骤3:根据发动机工况与调压阀控制模式,选取发动机工况确定控制用的pwm信号的基础脉宽、脉宽对应的体积流量、进气压这三个参数的其中一个,根据选取的参数获取对应的基础占空比,根据期望压力值与实际压力值有差值时对基础占空比做闭环调节,分别计算pid项,得到pid闭环占空比。为提高系统的灵活性,pid的增益和轴均为可标定。
[0083]
调压阀控制占空比为三部分组成:基础占空比、pid闭环控制、流量自学习控制量。
[0084]
cngon模式:如图8所示,并采用pid整定方式在期望轨压与实际轨压有差值时对基础占空比进行微调得到pid闭环占空比。
[0085]
所述的基础占空比为基础脉宽、脉宽对应的体积流量、进气压择一选取基础占空比,其中:
[0086]
基础脉宽:基础占空比为根据转速和每缸cng质量设定的预设值;
[0087]
脉宽对应的体积流量:基础占空比为由每缸质量转换为每缸体积,再根据转速和每缸体积设定的预设值;
[0088]
进气压:基础占空比为根据转速和进气压设定的预设值。
[0089]
根据燃气温度获取预设的燃气温度修正量,根据期望压力获取预设的期望压力修正量。
[0090]
基础占空比限值在[基础占空比*最小限值系数50,基础占空比*最大限值系数90]范围内,且基础占空比加上燃气温度修正量和期望压力修正量,得到修正的基础占空比。
[0091]
非cngon模式:基础占空比为0。
[0092]
根据所求得的最终基础占空比,导入pid闭环内进行微调。如图9/10/11所示,其pid微调过程中的p项、i项、d项均通过根据进气流量和期望轨压值与实际轨压值的差值通过查表获得。
[0093]
步骤4:针对电控减压阀制作工艺导致的流量差异,引入自学习单元,参与电控调压阀的输出控制,闭环控制方法可以采用内模模型。
[0094]
第一步,划分工况单元格
[0095]
怠速时根据转速范围划定怠速时自学习单元格,计算自学习单元格id。非怠速时,根据转速和进气压划定非怠速时学习单元格,计算自学习单元格id。
[0096]
第二步,进入自学习条件计算
[0097]
当水温大于一定阈值,发动机运行时间大于一定阈值,电控减压阀输出占空比在一定范围内,期望燃气压力稳定,实际轨压稳定,无减压阀相关故障时,进入自学习。
[0098]
第三步,自学习阶段自学习量计算
[0099]
根据当前自学习单元格内调整i项调节量。对此时i项进行累加,取16次的平均值,若平均值大于学习步长的2倍或单元格内容小于该平均值,则将步长值加到单元格值上;若平均值小于学习步长的-2倍或单元格内容大于该平均值,则将步长值从单元格值上减去。
最后将单元格值存入非易失区,即为自学习的流量控制量。
[0100]
第四步,非自学习阶段自学习量计算
[0101]
若当前i项学习值大于单元格值,则学习值减去步长,即为自学习的流量控制量。若当前i项学习值小于单元格值,则学习值加上步长,即为自学习的流量控制量。
[0102]
步骤5,考虑占空比信号的电池电压修正并对最大占空比做一个限值。对基础占空比、pid闭环占空比、自学习流量控制量之和进行电池电压查表修正,修正后的占空比经最大、最小占空比限值后得到最终的输出占空比。供调压阀对气轨压力进行控制。
[0103]
当上述方法运行过程中监控到压力过大或断油时,采取如下保护策略:
[0104]
压力过大保护:当实际轨压大于期望轨压与进气压查表限值之和时,占空比输出清0。
[0105]
断油保护:发动机启动、断油、实际轨压大于期望轨压一定值,占空比输出清0。
[0106]
此外,在测试模式功能下,可以通过单一标定修改输出的占空比。
[0107]
如图12所示,本发明的系统控制流程如下:车辆上的钢瓶内的高压气体的气压为20mpa,通过一级截止阀后,气压控制在1.8mpa-2.0mpa。随后高压气体通过二级比例阀导入气轨,其导入的气压由比例阀开启大小决定,当比例阀出气口压力高于1.6mpa时通过泄压阀进行泄压。
[0108]
将气轨内测量的实际燃气压力、期望轨压导入pid进行调节,输出pid闭环占空比。然后根据基础占空比、闭环占空比、自学习流量控制量经过限值后输出控制二级比例阀开度。从而实现整个轨压的系统控制。
[0109]
本技术方案可以在发动机稳态工况下,将气轨压力控制在期望压力
±
50kpa左右。并且由于引入了自学习算法,可以有效的规避掉由于减压阀的流量制造偏差带来的控制不稳定性。
[0110]
应理解,上述实施例仅用于说明本发明而不用于限值本发明的范围。此外应理解为在阅读本发明的内容后,本领域技术人员可以对本发明作各种改动和修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1