一种Nudging风电场观测资料改进风速预测的方法
一种nudging风电场观测资料改进风速预测的方法
技术领域
1.本发明涉及一种风速预报方法,尤其涉及一种nudging风电场观测资料改进风速预测的方法。
背景技术:
2.风资源是重要的可再生能源,风力发电在调整能源结构、减少大气污染、缓解全球变暖等方面发挥着重要的作用。数值模式是风速预报的主要手段,风速预报直接决定着风电功率的预测精度。统计表明,风电功率预测误差的60%来自于数值天气预报。
3.初始条件、物理参数化方案和网格分辨率是影响数值天气预报水平的关键。其中,由于物理参数化的发展进展缓慢,而网格分辨率的提高则可以通过不同尺度模式的嵌套降尺度得到,因此,初始条件的构建最为重要,是模式模拟结果改进的优先选项。利用资料同化方法将多源观测资料进行合理同化,并结合改进与风电场密切相关的参数化方案,通过多模式嵌套提高预报模式的空间分辨率,是改进风电场风速预报的有效途径。
4.目前,国内外业务预报系统中同化的观测资料主要有:常规气象观测资料(包括地面观测、探空观测、飞机观测、船舶观测等)、非常规气象观测资料(多普勒天气雷达、风廓线雷达、激光雷达、卫星、gps等)。风电基地一般建设在沙漠、隔壁、草原等远离气象站的地区,以我国为例,主要的风电基地位于西北干旱区、北部草原区和东南部的近海地区,风电场及其周边地区可利用的常规、非常规气象观测资料有限,加之非常规的卫星资料在非晴天条件下无法有效获取大气不同垂直层上的资料,导致数值预报模式中在预测风电场的风速时,缺乏风电基地及其周边地区的可用资料输入,制约了风速预报水平的提升。尽管风电基地在装机建设中均配备了相应的自动气象观测系统,例如:风电场建设的测风塔可实现不同高度层(30 m、50 m、70 m、120 m等)上的风速、风向、温度、湿度、气压等气象要素的高时间分辨率的全天候不间断观测;每台风力发电机上也安装有风速监测仪器,可实现对风机轮毂高度处风速、风向的实时观测;另外,部分风电基地还根据部门需求增加部署风廓线雷达。但是,上述资料尚未被同化和纳入进入业务数值预报模式中,这主要是由于:
⑴
大气低层的风速等气象要素受地形、下垫面等因素的影响,局地效益十分显著,风电场观测资料的空间代表性有限,无法有效进入数值模式;
⑵ꢀ
风电场的观测资料一般没有进行定期的气象仪器标定,资料质量需要进一步提高,尤其是对已积累了多年资料的风电场;
⑶
风电场观测资料的时间频率较高(15 min/次),在算力有限、对预报时效性要求较高的情况下,同化风电场高频资料在时效上存在一定的难度。综上,如何将风电场观测的空间尺度小、时间频率高的风速资料按照最优的同化途径,引入到现有数值预报模式中,可以显著提升数值预报模式对风电场风速预报水平。
5.国内外数值预报系统中使用的资料同化方法主要有:三维、四维变分(3dvar、4dvar)、集合kalman滤波和牛顿张弛逼近(nudging)。
6.3dvar方法产生的分析场是目标函数达到最小值的解,通常采用逐步迭代极小化方法得到。4dvar方法是在3dvar的观测算子中加入预报模式,实现一种四维隐式协方差模
式。
7.集合kalman滤波是通过构造最优化的权重矩阵,计算观测场和模式背景场的加权平均,得到分析时刻的最优估计。
8.nudging(牛顿张弛逼近)同化方法是一种较为成熟的、四维同化方法,通过构造关于观测场和模式场之间差异的权重函数,并作为强迫项引入到数值预报模式方程中,在模式积分预报过程中使模式状态不断向观测状态逼近,改进预报水平。以中尺度数值预报模式wrf(weatherresearchandforecasting)为例,nudging方法的预报方程如下:
………
(1)方程(1)的等号右端第二项为nudging强迫项,q为风速、温度等模式预报变量;xyz为三维空间;t为预报时间;fq为显式和隐式的物理过程项;n为观测资料的个数;为某观测点i处关于空间和时间的nudging权重函数,q0为观测的q值;qm为模式预报的q值;q
0-qm分析增量。
9.与3dvar/4dvar和集合kalman滤波方法相比,nudging方法的优点是:
⑴
不需要提供误差协方差矩阵,计算过程简单、效率高、对计算条件要求较低;
⑵
是一种连续的资料同化方法,可在模式连续积分过程中不断引入观测信息,从而使模式预报更平衡;
⑶
方程形式简单,可根据具体物理过程对nudging强迫项进行修改,以提高局地、高频观测资料的影响。但也存在下述缺点:
⑴
只能同化常规观测资料;
⑵
nudging方程中的权重函数一般是经验性的固定值,未包含4dvar或集合kalman滤波中的流依赖的天气演变信息。考虑到风电场观测的资料具有局地性强、频率高等特点,以及电力调度对风电功率预测时效性的需求,使用nudging方法同化风电场观测资料,并通过增加局地资料的影响范围和强度,引入流依赖的权重函数,是实现风电场风速资料最优化同化的可行途径。
10.风电场的风机装置由于改变了地表粗糙度,从而改变了下垫面地表能量平衡,对大气边界层产生重要影响。如何将风电场的装机容量(规模)、风机安装高度、风机大小等通过参数化方案引入到数值模式中,完善风机对大气边界层的影响是需要解决的基本问题。此外,目前面向风光电功率预测的数值天气预报模式的空间分辨率多为10km
×
10km,而典型的装机容量为5mw的风电场占地面积约为3km
×
3km甚至更小,现有数值天气预报难以反映局地天气的变化过程,亟待通过多模式的嵌套技术,提升风场的精细化预报水平。
技术实现要素:
11.本发明所要解决的技术问题是提供一种提升风电场精细化预报水平的nudging风电场观测资料改进风速预测的方法。
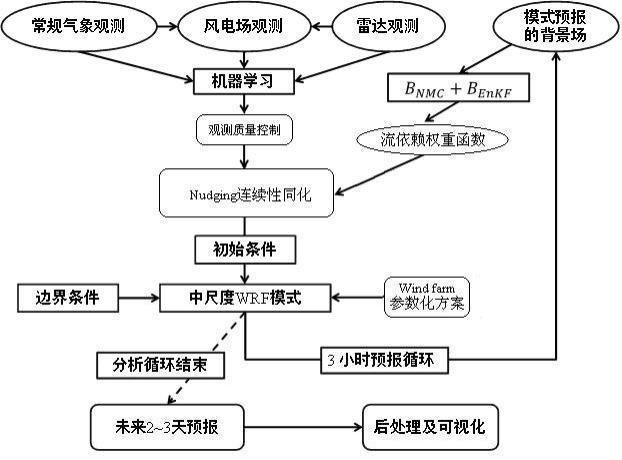
12.为解决上述问题,本发明所述的一种nudging风电场观测资料改进风速预测的方法,包括以下步骤:
⑴
采用机器学习算法,通过时间分辨率为6h/12h的常规气象观测资料、时间分辨率为15min的雷达观测资料对时间分辨率为15min的风电场观测资料进行质量控制;
⑵
采用nmc和enkf方法相结合,根据模式预报的背景场生成背景误差协方差矩阵b:;式中:b
nmc
为由nmc方法生成的背景误差协方差矩阵;b
enkf
为由enkf方法生成的背景误差协方差矩阵;b
enkf
在每个同化时间窗内统计。
13.⑶
构造流依赖的nudging权重函数,即混合nudging权重函数w
enkf
:式中:r为观测误差协方差矩阵;h为观测算子;h
t
为观测算子的转置;上标-1代表矩阵求逆运算;gwq为原nudging方程中的权重函数;
⑷
采用nudging同化方法将时间分辨率为15 min的风电场观测资料、时间分辨率为6 h/12 h的常规地面和探空观测资料、时间分辨率为15 min的多普勒天气雷达和风廓线雷达观测资料进行连续性同化,得到初始条件;
⑸
在wrf模式预报过程中加入风电场的参数化方案;
⑹
设定分析循序,按每3小时预报循环的方式重复步骤
⑵
~
⑸
;当分析循序结束后,进行未来2~3天的预报;
⑺
利用专业气象后处理软件得到可视化的图表和统计数据。
14.所述步骤
⑷
中nudging同化方法按下式进行:式中:q为模式预报变量;x y z为三维空间;t为预报时间;fq为显式和隐式的物理过程项;n为观测资料的个数;q0为观测的q值;qm模式预报的q值;q
0-qm分析增量。
15.所述步骤
⑹
中分析循序是指6小时、12小时或用户自定义中的一种。
16.本发明与现有技术相比具有以下优点:1、本发明采用机器学习算法对风电场观测资料进行质量控制,丰富并优化了风电场及其周边地区的资料数量和质量,从资料源头上解决了风电场及其周边地区资料不足、资料质量差的问题。
17.2、本发明通过nmc方法和enkf方法相结合,构建包含天气流型动态演变信息的“流依赖”的nudging权重函数,从而从同化方法上改进风速的预报。
18.3、本发明考虑了风电场影响大气边界层的参数化方案,更为细致地考虑了风电场对局地大气边界层的影响,从而可改进风速的预报。
附图说明
19.下面结合附图对本发明的具体实施方式作进一步详细的说明。
20.图1为本发明的示意图。
具体实施方式
21.如图1所示,一种nudging风电场观测资料改进风速预测的方法,包括以下步骤:
⑴
采用机器学习,通过时间分辨率为6h/12h的常规气象观测资料、时间分辨率为15min的雷达观测资料对时间分辨率为15min的风电场观测资料进行质量控制。
22.其中:风电场观测资料包括风电场测风塔不同高度层(30m、50m、70m、120m等)上的风速、风向、温度、湿度、气压等观测,每台风力发电机轮毂高度处的风速风向观测。
23.一般来讲,风电场建设之初部署的测风塔和风机轮毂高度上的气象观测仪器经过了标定,其观测得到的资料可信度较高。因此,利用风电场前1~2年的观测资料、周边气象站的常规观测资料、以及多普勒天气雷达、风廓线雷达资料,结合机器学习算法,得到风电场不同高度、不同位置、不同观测要素的基本特征并形成数据库,从而对风电场局地、高频观测资料进行质量控制。具体过程如下:
①
通过特征工程(featureengineering)学习算法,选取与风电场观测资料显著相关的气象站点资料(如常规地面站、探空站、多普勒天气雷达及风廓线雷达);
②
通过k均值(k-means)聚类算法,考虑不同气象要素的时空连续性特点,将风电场观测与不同气象观测进行分簇;
③
基于长短期记忆网络(lstm)、随机森林(randomforest)算法,针对
①
、
②
中选取的站点及观测,训练得到风电场气象要素订正模型,以及误差的时空分布特征;
④
将实时观测的风电场资料输入至
③
中的订正模型,从而实现对风电场实时观测资料的质量控制;
⑤
针对模式地形与风电场海拔高度之间的差异对同化的影响,采用以下方法进行订正:风电场海拔高度与模式地形差异在100m内时,利用近地层相似理论,将风电场观测插值到模式地形高度之上对应的高度;否则直接予以剔除。
24.⑵
采用nmc和enkf方法相结合,根据模式预报的背景场生成背景误差协方差矩阵b。b由用nmc方法得到的静态背景误差协方差(季节平均)和由分析时刻10~20个集合扰动样本产生的具有“流依赖”信息的背景误差协方差(每3小时一次,即包含了分析时刻大气的10~20个可能状态)的加权平均组成。即:
……………………………
(2)式中:b
nmc
为由nmc方法生成的背景误差协方差矩阵;b
enkf
为由enkf方法生成的背景误差协方差矩阵。b
enkf
在每个同化时间窗内统计。
25.其中:背景场或者称第一猜场,是指模式通过观测资料的客观插值或者平衡控制后形成的而第一次模拟/预报值。
26.⑶
构造流依赖的nudging权重函数,即混合nudging权重函数w
enkf
:
……………………………
(3)式中:r为观测误差协方差矩阵;h为观测算子;h
t
为观测算子的转置;上标-1代表矩阵求逆运算;gwq为原nudging方程中的权重函数[见方程(1)],一般是经验性给定的。
[0027]
由方程(2)-(3)可以看出,由于nudging权重函数w
enkf
是“流依赖”的,因此,所构造的w
enkf
包含了分析时刻天气流型的动态演变信息。
[0028]
⑷
采用nudging同化方法将时间分辨率为15min的风电场观测资料、时间分辨率为6 h/12 h的常规地面和探空观测资料、时间分辨率为15 min的多普勒天气雷达和风廓线
雷达观测资料进行连续性同化,得到初始条件。
[0029]
其中:将方程(1)中的nudging权重函数gwq用方程(3)中新构造的w
enkf
权重函数代替,则方程(1)可改写为:
……………ꢀ
(4)式中:q为模式预报变量;x y z为三维空间;t为预报时间;fq为显式和隐式的物理过程项;n为观测资料的个数;q0为观测的q值;qm模式预报的q值;q
0-qm分析增量。
[0030]
因此,本发明中nudging同化方法按方程(4)进行。为了使风电场局地、高频的观测资料最大化地影响模式预报结果,从而有效融入到数值模式中。在数值模式nudging同化设置过程中,采用单向反馈方案,最内层只包含风电场观测资料。
[0031]
⑸
为考虑风电场对局地大气边界层的影响,在wrf模式预报过程中加入风电场的参数化方案。
[0032]
⑹
设定分析循序,分析循序是指6小时、12小时或用户自定义中的一种。按每6小时预报循环的方式重复步骤
⑵
~
⑸
;当分析循序结束后,进行未来2~3天的预报。
[0033]
⑺
利用专业气象后处理软件(ncl、python等)得到可视化的图表和统计数据。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1