一种双风轮风力发电机组极端风况辨识方法
1.本发明属于风力机发电技术领域,特别涉及一种双风轮风力发电机组极端风 况辨识方法。
背景技术:
2.风力发电是一种将气体流动的动能转变为电能的过程。,现有的研究大多根据风 电机组的输出特性对风速进行估计,具有较高的估计精度,但不可否认的是,估 计的风速与实际风速相比具有滞后性,根据其采取的控制方式不能实时控制风 机,导致控制性能大打折扣。在工程中应用最为广泛的最佳转矩法具有简单、易 于实现的特点,但是当风速较低或风电机组转动惯量较大时,风轮转速跟踪实 时风速的响应速度会下降,导风能转换效率的降低。常规的滑模控制在处理非 线性、不确定性扰动等方面具有很大的优势,能够使系统在一定特性下沿规定的 状态轨迹运动,且结构简单、响应快速,但是会产生抖振。现有大型风电机组的 载荷的控制采用脉冲激光雷达测量风轮不同高度不同位置处的风速,并采用自适 应卡尔曼滤波算法对风速信号进行滤波处理;改进控制器在传统最佳转矩控制的 基础上引入超扭曲高阶滑模算法,以便提高转速跟踪性能;对于单风轮风电机组 用激光雷达只能探测风轮前面风速,然而由于自然环境复杂多变,会产生极端风 况,只探测风轮前面风速进行风机的自适应动态前馈调节是远远不够的;对发电 机桨距角和转矩转速的控制,避免极端载荷能力显得不足;实际上不可避免地会 遇到极端风况。仅依靠发电机转速与载荷信号对风况进行辨识,往往存在滞后性。 借助激光测风雷达,可以提前获取风速数据,将风况提前辨识出来。坏境风速具 有随机性,而且易受坏境干扰,对风速进行滤波,得到便于处理的风速数据,能 够快速准确地对风况进行辨识。依靠风速等数据将极端风况提前辨识出来,对双 风轮风力机安全、稳定运行有重要意义。
技术实现要素:
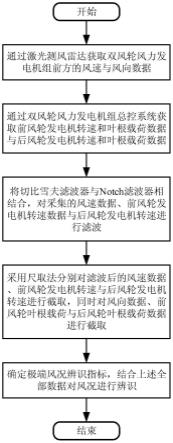
3.本发明的目的是提出一种双风轮风力发电机组极端风况辨识方法,采用脉冲 激光雷达测量风轮不同高度不同位置处的风速,并对风速信号进行滤波处理;改 进控制器在传统最佳转矩控制的基础上引入超扭曲高阶滑模算法,以便提高转速 跟踪性能;其特征在于,采用双风轮风力机,通过激光测风雷达获取双风轮风力 发电机组前方的风速与风向数据;通过双风轮风力发电机组总控系统获取前、后 风轮发电机转速和叶根载荷数据;将切比雪夫滤波器与notch滤波器相结合,对 风速数据、前、后风轮发电机转速数据进行滤波处理,得到滤波后的风速数据、 前、后风轮发电机转速数据,确定极端风况辨识指标,结合上述全部数据对风况 进行辨识,采用变长度尺取法,根据转速自动调整尺取长度,对数据进行精简, 加快辨识速度;双风轮风力发电机辨识极端风况具体包括以下步骤:
4.步骤1、通过激光测风雷达获取双风轮风力发电机组前方的风速与风向数据;
5.步骤2、通过双风轮风力发电机组总控系统获取前风轮发电机转速和叶根载 荷数据与后风轮发电机转速和叶根载荷数据;
6.步骤3、将切比雪夫滤波器与notch滤波器相结合,对采集的风速数据、前 风轮发电机转速数据与后风轮发电机转速进行滤波;
7.步骤4、采用尺取法分别对滤波后的风速数据、前风轮发电机转速与后风轮 发电机转速进行截取,同时对风向数据、前风轮叶根载荷与后风轮叶根载荷数据 进行截取;
8.步骤5、确定极端风况辨识指标,结合上述全部数据对风况进行辨识。
9.所述步骤3中将切比雪夫滤波器与notch滤波器相结合,对采集的风速数据、 前风轮发电机转速数据与后风轮发电机转速进行滤波包括:
10.步骤3.1:备份激光测风雷达采集的原始风速数据w
in
;
11.步骤3.2:将切比雪夫滤波器与notch滤波器相结合,对风速数据、前风轮 发电机转速g
fr
数据与后风轮发电机转速g
rr
数据进行滤波处理,得到滤波后的风 速数据、前风轮发电机转速数据与后风轮发电机转速数据。
12.所述步骤3.2中将切比雪夫滤波器与notch滤波器相结合,对风速数据、前 风轮发电机转速g
fr
数据与后风轮发电机转速g
rr
数据进行滤波处理,得到滤波后 的风速数据、前风轮发电机转速数据与后风轮发电机转速数据包括:
13.步骤3.2.1:搭建ⅰ型切比雪夫滤波器,先对数据进行低通滤波,屏蔽高频 噪声干扰其幅频特性g
p
(ω)为:
[0014][0015]
式中,ε为通带波纹的波动系数,0<ε<1;ωc为通带的截止频率, ω为通带频率;为p阶切比雪夫多项式,其表达式为:
[0016][0017]
步骤3.2.2:搭建自适应notch滤波器,利用正交信号的线性组合,完成对 数据中某一特定频率的窄带滤波;
[0018]
选取正交信号xc(n)=bcos(ω0n)与xs(n)=bsin(ω0n),其中,n为时间序列, n=1,2,
…
;b为参考信号振幅;ω0为需要滤波的特定频率;
[0019]
性能指标函数jm(k)为:
[0020][0021]
式中,n=1,2,
…
,m,m为采样点总数;w
in
(n)为采集的原始风速数据;λ为遗忘 因子;k(m)为正交信号权重向量;x(n)为正交信号向量;t为矩阵转置。
[0022]
为求取使得上述指标函数取得最小值的k(m),采用递推公式如下:
[0023]
k(m)=k(m-1)+y(m)ε(m),
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0024]
ε(m)=w
in
(m)-k
t
(m-1)x(m),
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0025][0026][0027]
式中,σ为极小的正数;y(m)为增益向量;x(m)为正交信号向量;p(m)为递 推向量;i为二维单位矩阵;t为矩阵转置。
[0028]
所述步骤4中采用尺取法分别对滤波后的风速数据、前风轮发电机转速与后 风轮发电机转速进行截取,同时对风向数据、前风轮叶根载荷与后风轮叶根载荷 数据进行截取包括:
[0029]
步骤4.1、尺取长度分别固定为一秒钟、十秒钟、一分钟与十分钟,以数据 采样步长作为尺取移动步长,更新尺取数据;
[0030]
步骤4.2、一秒钟与十秒钟分别截取并更新滤波后的风速数据、前风轮发电 机转速数据与后风轮发电机转速数据,一分钟与十分钟分别尺取并更新风向数据 与备份的风速数据;
[0031]
步骤4.3、采用变长度尺取前风轮叶根载荷数据与后风轮叶根载荷数据;
[0032]
步骤4.4、变长度δt
fr
与δt
rr
选取规则为使得不等式成立的最小值,即:
[0033]
式中,t为当前时刻;δt为采样步长;c1与c2分别为前后风轮采样步长的正整数 倍;g
rf
与g
rr
分别为前后风轮齿轮箱传动比。
[0034]
所述步骤5中确定极端风况辨识指标,结合上述全部数据对风况进行辨识包 括:
[0035]
极端风况辨识指标设定为一秒钟平均风速增量极限值l
w1
、十秒钟平均风速 增量极限值l
w10
、一秒钟前风轮发电机平均转速增量极限值l
frg1
、十秒钟前风轮 发电机平均转速增量极限值l
frg10
、一秒钟后风轮发电机平均转速增量极限值 l
rrg1
、十秒钟后风轮发电机平均转速增量极限值l
rrg10
、一分钟风速湍流强度极限 值l
w60
、十分钟风速湍流强度极限值l
w600
、一分钟风向改变极限值l
d60
、十分钟 风向改变极限值l
d600
、变长度前风轮叶根载荷峰谷偏差极限值l
frpv
、变长度后风 轮叶根载荷峰谷偏差极限值l
rrpv
。通过之前的数据分别计算上述指标并与极限值 比较,有一项指标大于极限值即为极端风况。
[0036]
本发明的有益效果是:使用激光测风雷达获取风速数据,能够提前辨识出极 端风况;将切比雪夫滤波器与notch滤波器相结合,不仅可以滤掉高频噪声干扰, 还可以选择特
性频段进行滤波,提高了信号的抗干扰能力;采用固定长度尺取法, 对数据进行冗余,提高辨识可靠性;采用变长度尺取法,根据转速自动调整尺取 长度,对数据进行精简,加快辨识速度。
附图说明
[0037]
图1为双风轮风力发电机组极端风况辨识方法的流程图。
[0038]
图2为将切比雪夫滤波器与notch滤波器相结合对风速的滤波;其中a为低 通滤波前时域图;b为低通滤波后时域图;
[0039]
图3为采用尺取法分别对滤波后的风速数据进行截取;其中a为尺取前风速; b为尺取前风速;
具体实施方式
[0040]
本发明提出一种双风轮风力发电机组极端风况辨识方法,下面结合附图和实 施例对本发明作详细说明。
[0041]
如图1所示是双风轮风力发电机组极端风况辨识方法的流程图。图中所示双 风轮风力发电机组极端风况辨识包括以下步骤:
[0042]
步骤1、通过激光测风雷达获取双风轮风力发电机组前方的风速与风向数据;
[0043]
步骤2、通过双风轮风力发电机组总控系统获取前风轮发电机转速和叶根载 荷数据与后风轮发电机转速和叶根载荷数据;
[0044]
步骤3、将切比雪夫滤波器与notch滤波器相结合,对采集的风速数据、前 风轮发电机转速数据与后风轮发电机转速进行滤波;
[0045]
步骤4、采用尺取法分别对滤波后的风速数据、前风轮发电机转速与后风轮 发电机转速进行截取,同时对风向数据、前风轮叶根载荷与后风轮叶根载荷数据 进行截取;
[0046]
步骤5、确定极端风况辨识指标,结合上述全部数据对风况进行辨识。
[0047]
如图2所示将切比雪夫滤波器与notch滤波器相结合对风速的滤波,其中a 为低通滤波前时域图;b为低通滤波后时域图;所述步骤3中将切比雪夫滤波器 与notch滤波器相结合,对采集的风速数据、前风轮发电机转速数据与后风轮发 电机转速进行滤波包括:
[0048]
步骤3.1:备份激光测风雷达采集的原始风速数据w
in
;
[0049]
步骤3.2:将切比雪夫滤波器与notch滤波器相结合,对风速数据、前风轮 发电机转速g
fr
数据与后风轮发电机转速g
rr
数据进行滤波处理,得到滤波后的风 速数据、前风轮发电机转速数据与后风轮发电机转速数据。
[0050]
所述步骤3.2中将切比雪夫滤波器与notch滤波器相结合,对风速数据、前 风轮发电机转速g
fr
数据与后风轮发电机转速g
rr
数据进行滤波处理,得到滤波后 的风速数据、前风轮发电机转速数据与后风轮发电机转速数据包括:
[0051]
步骤3.2.1:搭建ⅰ型切比雪夫滤波器,先对数据进行低通滤波,屏蔽高频 噪声干扰其幅频特性g
p
(ω)为:
[0052][0053]
式中,ε为通带波纹的波动系数,0<ε<1;ωc为通带的截止频率;ω为通带频率;为p阶切比雪夫多项式,其表达式为:
[0054][0055]
步骤3.2.2:搭建自适应notch滤波器,利用正交信号的线性组合,完成对 数据中某一特定频率的窄带滤波;
[0056]
选取正交信号xc(n)=bcos(ω0n)与xs(n)=bsin(ω0n),其中,n为时间序列, n=1,2,
…
;b为参考信号振幅;ω0为需要滤波的特定频率;
[0057]
性能指标函数jm(k)为:
[0058][0059]
式中,n=1,2,
…
,m,m为采样点总数;w
in
(n)为采集的原始风速数据;λ为遗忘 因子;k(m)为正交信号权重向量;x(n)为正交信号向量;t为矩阵转置。
[0060]
为求取使得上述指标函数取得最小值的k(m),采用递推公式如下:
[0061]
k(m)=k(m-1)+y(m)ε(m),
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0062]
ε(m)=w
in
(m)-k
t
(m-1)x(m),
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0063][0064][0065]
式中,σ为极小的正数;y(m)为增益向量;x(m)为正交信号向量;p(m)为递 推向量;i为二维单位矩阵;t为矩阵转置。
[0066]
如图3中a为尺取前风速;b为尺取前风速所示;所述步骤4中采用尺取法 分别对滤波后的风速数据、前风轮发电机转速与后风轮发电机转速进行截取,同 时对风向数据、前风轮叶根载荷与后风轮叶根载荷数据进行截取包括:
[0067]
步骤4.1、尺取长度分别固定为一秒钟、十秒钟、一分钟与十分钟,以数据 采样步长作为尺取移动步长,更新尺取数据;
[0068]
步骤4.2、一秒钟与十秒钟分别截取并更新滤波后的风速数据、前风轮发电 机转速数据与后风轮发电机转速数据,一分钟与十分钟分别尺取并更新风向数据 与备份的风速数据;
[0069]
步骤4.3、采用变长度尺取前风轮叶根载荷数据与后风轮叶根载荷数据;
[0070]
步骤4.4、变长度δt
fr
与δt
rr
选取规则为使得不等式成立的最小值,即:
[0071]
式中,t为当前时刻;δt为采样步长;c1与c2分别为前后风轮采样步长的正整数 倍;g
rf
与g
rr
分别为前后风轮齿轮箱传动比。
[0072]
所述步骤5中确定极端风况辨识指标,结合上述全部数据对风况进行辨识包 括:
[0073]
极端风况辨识指标设定为一秒钟平均风速增量极限值l
w1
、十秒钟平均风速 增量极限值l
w10
、一秒钟前风轮发电机平均转速增量极限值l
frg1
、十秒钟前风轮 发电机平均转速增量极限值l
frg10
、一秒钟后风轮发电机平均转速增量极限值 l
rrg1
、十秒钟后风轮发电机平均转速增量极限值l
rrg10
、一分钟风速湍流强度极限 值l
w60
、十分钟风速湍流强度极限值l
w600
、一分钟风向改变极限值l
d60
、十分钟 风向改变极限值l
d600
、变长度前风轮叶根载荷峰谷偏差极限值l
frpv
、变长度后风 轮叶根载荷峰谷偏差极限值l
rrpv
。通过之前的数据分别计算上述指标并与极限值 比较,有一项指标大于极限值即为极端风况。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1