一种发动机VVL执行器控制方法与流程
一种发动机vvl执行器控制方法
技术领域
1.本发明属于发动机控制领域,具体涉及一种发动机vvl执行器的控制方法。
背景技术:
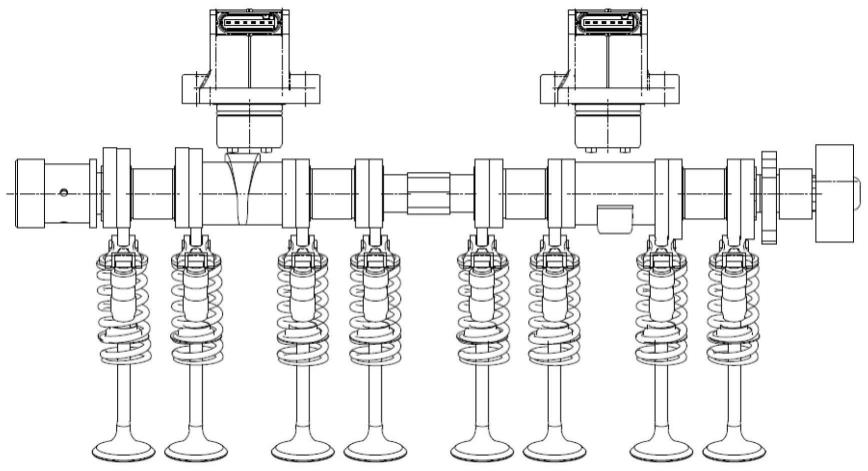
2.发动机vvl技术也叫可变气门升程技术。简单说来,可变气门正时系统是通过改变气门打开和关闭的时机,而可变气门升程是改变气门开度大小;vvl执行器与凸轮轴的详细内部结构及安装效果如图1、图2所示;每个vvl执行器上设置有两个销子。
3.传统汽油发动机的气门升程是固定不可变的。也就是说凸轮轴的凸轮型线只有一种。这就造成了该升程不可能使发动机在高速区和低速区都得到良好的响应;其结果就是发动机既得不到最佳的高速效率,也得不到最佳的低速扭矩,却能得到全工况下发动机均衡的性能。
4.在搭载vvl技术的发动机运行过程中,vvl执行器通过伸出销子插入到设计了两套凸轮型线的凸轮轴卡槽中,随着凸轮轴的转动vvl执行器通过销子推动凸轮轴左右移动,从而切换发动机的凸轮型线设计最终实现改变气门升程的效果。随着vvl技术的应用可以使发动机在高速区和低速区都能得到更加合理的气门升程,从而改善发动机的高速功率和低速扭矩性能以及燃油经济性。
5.在原有发动机平台研发vvl技术,一般在项目立项之前都需要组装一台样机,并安装到性能试验台架上进行发动机性能摸底的预研究,初步判断搭载新技术的发动机样机所能够达到的性能水平以及了解发动机的市场竞争力;根据这个结果进行评审,主机厂才会正式立项进行研发工作,从而增加技术研发方向的准确性。
6.传统情况下,为了完成vvl样机的台架性能摸底测试,就需要ecu软件供应商为新的vvl样机先匹配升级一套具备vvl控制功能的ecu软件数据。因为ecu软件中vvl执行器的控制系统非常复杂,它需要识别曲轴相位以及凸轮轴正时,并在这个基础上开发复杂的控制策略;所以ecu软件供应商在开发升级vvl控制模块的过程需要耗费大量时间且增加项目研发费用。
技术实现要素:
7.本发明在保证原平台ecu控制软件不变的情况下,通过增加带pwm输出以及can通讯功能的简易控制器从而实现控制vvl执行器切换凸轮轴模式改变气门升程的功能,并且完成了vvl样机全部的台架性能摸底试验任务。具体技术方案如下:一种发动机vvl执行器的控制方法:包括如下步骤:(1)在发动机台架试验中的vvl执行器上搭载一vvl控制器,所述销子控制器与vvl执行器并联,vvl控制器上设置有pwm硬件端口,并通过该pwm硬件端口分别与vvl执行器的两个销子连接,通过can通讯连接至vvl执行器的操作电脑;(2)控制器系统中,在vvl执行器的操作电脑上通过busmaster软件把vvl执行器的动作命令转化成数值信号0/1/2,并通过dbc文件翻译成can报文传递给vvl控制器;
(3)通过simulink搭建can信号的接收和解析的软件逻辑,将vvl执行器的动作命令采集到控制器中,并赋值给变量vvl_on_1,最后传递给变量command;(4)设置确定vvl控制器的控制逻辑及vvl执行器销子动作指令,vvl控制器周期性地将销子状态指令转化成pwm信号,通过pwm硬件端口控制vvl硬件执行,从而移动凸轮轴并切换发动机的气门升程。
8.进一步的,所述销子控制器具备pwm输出、can通讯功能和软件刷写功能。
9.进一步的,步骤(4)vvl控制器的控制逻辑如下:(41)设置销子伸缩情况与凸轮轴切换方向的对应关系,并设置两个销子不可同时伸出,且单次持续伸出0.5s后强制缩回;(42)控制凸轮轴左右移动的控制命令通过can信号传递至vvl控制器系统根据接收到的can报文先解析到vvl_on_1变量中,之后传递给变量command;变量command有3种状态0/1/2,当command=1表示左移命令,command=2表示右移命令, command=0表示系统进入强制执行模式,但凸轮轴不移动;(43)根据控制过程中出现的控制状态在simulink软件中通过stateflow设计相应的状态模式。
10.进一步的,步骤(43)状态模式包括开启模式、主动进入模式、左移动模式、右移动模式和安全模式,其中安全模式切换通过在模式切换过程中增加变量作为状态模式切换安全模式条件。
11.利用本发明方法能够在ecu控制软件中没有vvl驱动控制软件的情况下,实现对vvl执行器的驱动控制,同时满足了vvl样机性能摸底试验时随意切换凸轮型线改变气门升程的功能需求;最终达到了既能满足vvl执行器的正常驱动控制需求又缩短了发动机研发周期以及降低研成本的目的,可以有效加快发动机的研发进度并有效减少研发费用。此外,本发明方法可以作为平台化方案兼容所有型号发动机研发过程中对vvl执行器的控制需求,实现此套系统的效益最大化。
附图说明
12.图1 vvl与凸轮轴的三维数模图;图2 vvl与凸轮轴内部结构图;图3 本发明vvl控制系统硬件线路图;图4 本发明用于发送can报文的dbc文件截图;图5 can信号的解析逻辑图;图6 控制vvl执行器的simulink控制模型整体框架图;图7 实施例中vvl执行器中销子的控制策略图;图8 实施例中通过pwm端口控制vvl执行器的simulink控制模型图图9 实施例中在busmaster软件中导入dbc文件的截图;图10 实施例应用图-阿特金森atk循环缸压图;图11 实施例应用图-otto循环缸压图。
具体实施方式
13.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他 实施例,都属于本发明保护的范围。
14.实施例1本实施例发动机台架试验中设置有两个vvl执行器,执行器结构如图1-2所示,每个vvl有两个销子,为了描述方便,我们将vvl执行器定义成a和b,对应的销子定义成a1、a2、b1、b2。图2展示了vvl执行器a安装在凸轮轴上的剖面图。
15.在vvl控制器上增加一个vvl控制器,控制器与vvl执行器并联,vvl控制器上设置有pwm硬件端口,并通过该pwm硬件端口分别与vvl执行器的两个销子连接,通过can通讯连接至vvl执行器的操作电脑;其搭载方式如图3所示。控制器系统中,在vvl执行器的操作电脑上通过busmaster软件把vvl执行器的动作命令转化成数值信号0/1/2,并通过dbc文件翻译成can报文传递给vvl控制器,如图4所示。通过simulink搭建can信号的接收和解析的软件逻辑,将vvl执行器的动作命令采集到控制器中,并赋值给变量vvl_on_1,最后传递给变量command,如图5所示。
16.设置销子伸缩情况与凸轮轴切换方向的对应关系,并设置两个销子不可同时伸出,且单次持续伸出0.5s后强制缩回。在本实施例中确认如下操作动作:(1)在a1和b2两个销子伸出且a2和b1同时缩回的情况下,凸轮轴向左切换;在a1和b2两个销子缩回且a2和b1同时伸出的情况下,凸轮轴向右切换。
17.(2)当凸轮轴完成升程模式切换并且vvl执行器与凸轮轴脱离之后,凸轮轴本身会进行位置自锁定。
18.(3)a1和a2可以同时缩回却不能同时伸出,否则会出现配合冲突造成销子会被凸轮轴撞断的结果;同理b1和b2也有同样的特性要求。vvl硬件特性要求,vvl执行器销子在单次持续伸出0.5s后需要强制缩回,否则会出现硬件过热损坏的情况。
19.本实施例中,控制凸轮轴左右移动的控制命令通过can信号传递至vvl控制器系统根据接收到的can报文先解析到vvl_on_1变量中,之后传递给变量command;变量command有3种状态0/1/2,当command=1表示左移命令,command=2表示右移命令, command=0表示系统进入强制执行模式,但凸轮轴不移动。
20.根据控制过程中出现的控制状态在simulink软件中通过stateflow设计相应的状态模式。本实施例中,为了能够根据can信号输入的动作需求指令,准确合理地控制a1,a2,b1,b2四个销子的动作,并且杜绝vvl执行器与凸轮轴出现配合冲突以及vvl执行器过热的情况;所以在simulink软件中通过stateflow设计了五个状态模式(如图6所示),分别为safemode_on 、safemode、safemode_repeat、leftmode、rightmode。当stateflow处于safemode_on 、safemode、safemode_repeat三个模式下,系统都会输出a1= 0,a2=0,b1=0,b2=0;此时,四个销子都将处于缩回状态,凸轮轴不移动。处于leftmode模式下则输出a1= 1,a2=0,b1=0,b2=1表示a1、b2销子处于伸出状态,a2 、b1销子处于缩回状态;此时,vvl执行器会将凸轮轴推向左边。处于rightmode模式下则输出a1= 0,a2=1,b1=1,b2=0表示a1、b2销子处于缩回状态,a2 、b1销子处于伸出状态;此时,vvl执行器会将凸轮轴推向右边。
21.系统在上电初始化之后,首先会进入safemode_on,之后会根据can上的指令切换到不同的状态模式中。因为在整个系统运行周期内,系统都会运行在设定好的五个模式中,所以就不会出现vvl与凸轮轴的配合冲突导致硬件损坏的情况;并且通过stateflow软件的模式切换功能,把单次vvl的动作执行控制在0.5s之内,防止vvl执行器出现硬件过热情况。
22.整个控制逻辑从接收到控制command信号到控制vvl执行器的销子动作的过程如下;在控制器初始化以后,通过busmaster软件发出can报文使得控制器中command=1,系统会从safemode_on模式进入leftmode模式,vvl执行器按照规定动作使凸轮轴向左移动;系统在leftmode模式下运行指定的时序周期后,状态机系统会自动跳转到safemode模式;此时,vvl所有的销子都将处于缩回状态,并且vvl执行器与凸轮轴处于相互脱离的安全状态;如果需求指令变成command=2,系统会从safemode模式切换到rightmode模式,vvl执行器按照规定伸缩使凸轮轴向右移动,同理稳定合理的时序周期后,系统又会自动退回到safemode模式。
23.同时,特殊情况下可能需要重复多次进入同一模式;例如,当系统从leftmode切换到safemode后,需要重新进入leftmode模式;这时候,可以先输入指令command=0让系统进入safemode_repeat模式,之后输入command=1系统进入leftmode模式;从而实现重复进入同一个系统的目的。
24.综上,整个控制软件实现了以下控制功能:1)系统启动后,状态初始化及功能:系统初始化后,stateflow会第一时间进入safemode_on模式;此时, vvl硬件以及控制系统都处于初始化的安全状态;如果没有接收到can报文,那么软件系统会给command变量赋值0,那么系统会长期停留在safemode_on模式;系统接收到can报文指令command=1后,系统会从safemode_on进入leftmode且凸轮轴向左移动; command=2时,系统会从safemode_on进入rightmode且凸轮轴向右移动;2)vvl执行器节能及过热保护功能:为了防止vvl执行器长时间处在持续工作状态导致vvl执行器过热烧坏的情况出现;stateflow系统在进入leftmode或rightmode模式且运行指定周期之后能够自动切回到safemode模式,以及在command信号指令不变的情况下系统能长期稳定在safemode模式中,在safemode模式中vvl执行器将处在非工作的安全状态且销子与凸轮轴也是处于完全脱离的状态;为了实现该功能,在stateflow状态切换过程中增加了变量d作为状态模式切换的判断条件。
25.如图7所示,当系统进入leftmode或rightmode模式后stateflow会开始计时,运行规定的时序周期后状态变量d会被赋值;当变量d满足stateflow状态从leftmode模式切换到safemode模式的判断条件[d==2]或者rightmode模式切换到safemode模式的判断条件[d==1]其中之一时,系统都会自动进入safemode模式;由于退出safemode状态需要满足[command==1&&d==1]或者[command==2&&d==2]的条件,所以系统在command指令不变的情况下会长期稳定在safemode模式;这样就实现了当凸轮轴移动到指定位置并稳定了特定时序周期后,会将vvl执行器的销子缩回到安全状态的功能;从而能够达到保护vvl执行器以及减少执行器与凸轮轴之间摩擦的目的。
[0026]
3)实现vvl、可变气门升程功能:
通过在stateflow中增加safemode模式可以实现leftmode与rightmode之间双向切换;实现了凸轮轴的左右移动从而改变发动机的气门升程。
[0027]
当系统需要重复多次强制进入某个模式时,也可以通过另外的途径强制进入;例如,当系统在leftmode模式维持一定时间后,会自动退入到safemode;此时如果需要再次进入leftmode,那么就需要通过另外一条路径进入;先输入command=0进入safemode_repeat,紧接着输入command=1就可以重新进入leftmode或者输入command=2就可以重新进入rightmode。这样就实现了在不清楚凸轮轴处在何种模式下也可以通过其它路径强制进入某一模式从而实现凸轮轴的自主可控的功能。
[0028]
4)实现vvl与凸轮轴的安全自锁功能:由于在vvl的核心控制策略中,我们通过stateflow软件定义了五个状态模式safemode_on 、safemode、safemode_repeat、leftmode、rightmode,系统在整个工作周期中都不会跳出这五个状态模式;在每个状态模式中,都有一套对vvl执行器四个销子的控制指令组合;该组合可以保证在发动机运行过程vvl执行器四个销子与凸轮轴不存在冲突;可以保证vvl执行器与凸轮轴的动作协调配合,最终实现安全自锁功能。
[0029]
通过上述设置,在simulink模型中通过stateflow软件确定了vvl的控制逻辑,并明确了两个vvl执行器中四个销子的动作指令后,控制器会周期性地将销子的状态指令转化成pwm信号,最后通过pwm硬件端口去控制vvl硬件的执行从而移动凸轮轴并切换发动机的气门升程,如图8所示。最终完成了通过can通讯方式实现手动控制vvl执行器切换凸轮轴模式的整个过程。图9为dbc文件导入到busmaster软件截图,后续试验过程中通过改变vvl_state变量的值可以控制vvl执行器的动作。
[0030]
最后,正常启动发动机控制台架,并开始正常试验;并记录台架数据。在试验过程中通过观察测功机反拖发动机过程中的缸压数据可以确认凸轮轴的切换情况,如图10和图11所示。
[0031]
上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1