一种电动汽车用光热发电设备
本发明涉及太阳能发电设备,尤其涉及一种电动汽车用光热发电设备。
背景技术:
1、目前,随着电动汽车的发展,其续航能力有很大的提高,但相比较于燃油汽车,电动汽车仍然受到续航能力的问题,他只能在车辆减速和制动时为电动汽车补充一定的电量,但在加速、正常行驶以及高速行驶的状况时,电动汽车耗电量大,并不能及时的为电动的汽车补充电量,整套系统的充电装置工作效率较低,其电动汽车的续航能力较低。而菲涅尔透镜聚光斯特林发电机在太阳能热发电领域应用广泛。普通的碟式斯特林发电系统的发动机支撑臂对阳光有遮挡作用,不能对太阳光进行追踪,在发电时需要调节聚光器,使用非常不便。
2、因此,为解决电动汽车的续航问题,结合菲涅尔透镜聚光斯特林发电机,有必要设计一种电动汽车用光热发电设备。
技术实现思路
1、本发明针对电动汽车的续航以及不能对太阳光进行追踪的问题提供一种电动汽车用光热发电设备,基于菲涅尔透镜单元实现,使菲涅尔透镜随太阳位置进行调节,而且可以对电动汽车用电量进行实时监测和控制,有效解决解决背景技术的问题。
2、本发明解决其技术问题所采用的技术方案为:
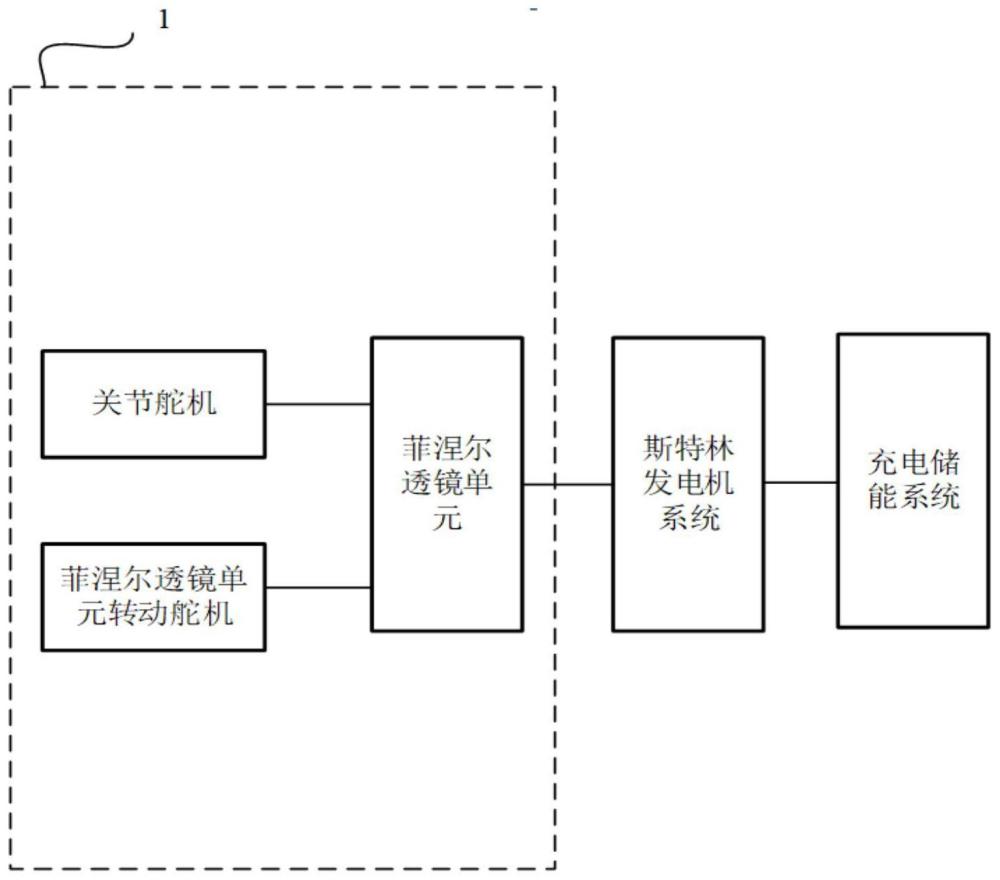
3、一种电动汽车用光热发电设备,包含光热发电系统以及充电储能系统;光热发电系统包括检测控制单元、太阳能跟踪单元、斯特林发电机系统;通过检测控制单元控制太阳能跟踪单元中各菲涅尔透镜单元的位置,增大光热发电功率;通过太阳能跟踪单元将太阳光转化成内能,并通过斯特林发电机系统进行热电转化,产生电能;通过电子器件以及电路设备为电动汽车提供电能。具体如下:
4、包括光热发电系统及与光热发电系统连接的充电储能系统,所述的充电储能系统与电动汽车连接,所述的光热发电系统包括检测控制单元及与检测控制单元连接的太阳能跟踪单元和斯特林发电机系统,所述的太阳能跟踪单元包括固定板11、第一菲涅尔透镜单元14、多个菲涅尔透镜带13和安装在固定板11上的固定架12,所述的斯特林发电机系统固定连接在固定板11上,所述的固定架12位于固定板11的中心,所述的多个菲涅尔透镜带13安装在固定架12的侧面上,第一菲涅尔透镜单元14安装在固定架12上,所述的斯特林发电机系统的加热头位于以第一菲涅尔透镜单元14和多个菲涅尔透镜带13的菲涅尔透镜焦距为中心的球形区域内。
5、作为本发明更优的技术方案:所述的第一菲涅尔透镜单元14包括第一透镜支撑板141、第一菲涅尔透镜转动舵机142和第一菲涅尔透镜143;所述第一菲涅尔透镜转动舵机142壳体固定连接在固定架12上,第一菲涅尔透镜143固定连接在第一透镜支撑板141上,第一透镜支撑板141固定连接在第一菲涅尔透镜转动舵机142马达上。
6、作为本发明更优的技术方案:所述的菲涅尔透镜带13,包括由上至下依次为多个菲涅尔透镜单元,所述的菲涅尔透镜单元包括菲涅尔透镜,所述的菲涅尔透镜通过菲涅尔透镜转动舵机连接在关节舵机支撑架上,所述的关节舵机支撑架通过关节转轴连接在关节舵机上,最上面的菲涅尔透镜单元的关节舵机连接在固定架上,其余关节舵机连接在相邻的菲涅尔透镜单元的关节舵机支撑架上。
7、作为本发明更优的技术方案:所述的菲涅尔透镜带13,包括3个菲涅尔透镜单元,分别为第二菲涅尔透镜单元133、第三菲涅尔透镜单元137和第四菲涅尔透镜单元1311。
8、作为本发明更优的技术方案:所述的第二菲涅尔透镜单元133包括第一关节舵机131,与第一关节舵机131马达连接的第一关节转轴132、第一关节转轴132与第二关节舵机支撑架134固定连接形成的四边形框架和第二菲涅尔透镜转动舵机1332,第二关节舵机支撑架134与第二菲涅尔透镜转动舵机1332外壳连接,第二菲涅尔透镜转动舵机1332马达与第二透镜支撑板1331固定连接,第二菲涅尔透镜1334固定连接在第二透镜支撑板1331上,第一关节舵机131外壳固定连接在固定架12上,
9、作为本发明更优的技术方案:所述的第三菲涅尔透镜单元137包括第二关节舵机135、与第二关节舵机135马达连接的第二关节轴136,第二关节轴136与第三关节舵机支撑架137固定连接形成的四边形框架和第三菲涅尔透镜转动舵机1372,第二关节舵机支撑架137与第三菲涅尔透镜转动舵机1372外壳连接,第三菲涅尔透镜转动舵机1372马达与第三透镜支撑板1371连接,第二关节舵机135固定连接在第二关节舵机支撑架134上。
10、作为本发明更优的技术方案:所述的第四菲涅尔透镜单元1311包括第三关节舵机138、与第三关节舵机38马达连接的第三关节轴1310,第三关节转轴1310与第四关节舵机支撑架13113固定连接形成的四边形框架和第四菲涅尔透镜转动舵机13112,第四关节舵机支撑架13113与第四菲涅尔透镜转动舵机13112外壳连接,第四菲涅尔透镜转动舵机13112马达与第三透镜支撑板1371连接,第三关节舵机138外壳固定连接在第三关节舵机支撑架137上。
11、作为本发明更优的技术方案:所述的检测控制单元包括安装在菲涅尔透镜单元上的光电传感器和控制器,所述的光电传感器与控制器连接,所述的控制器与舵机连接。
12、作为本发明更优的技术方案:所述的斯特林发电机系统包括斯特林发电机21和与斯特林发电机21连接的散热系统,所述散热系包括水箱、水泵、管路和散热器。
13、基于所述的一种电动汽车用光热发电设备实现,本发明还提供一种太阳能跟踪方法,具体如下:
14、一、所述第一菲涅尔透镜转动舵机复位,第一光电传感器检测光电流值并作为设定值ia,此时的第一菲涅尔透镜转动舵机的角度位置反馈至控制芯片并记录,第一菲涅尔透镜转动舵机顺时针旋转固定角度,检测当前的光电流ib,进行光电流判断;当ib小于ia时,当前的第一菲涅尔透镜转动舵机角度位置不反馈至控制芯片,继续前进;当ib大于或等于ia时,当前的第一菲涅尔透镜转动舵机角度位置反馈至控制芯片并记录,代替上一个舵机角度位置,并将ib赋值给ia,继续前进;转动一个周期后,第一菲涅尔透镜转动舵机运动到最后反馈到控制芯片的角度位置后停止;此时即为第一菲涅尔透镜单元的最佳光照强度对应位置;一次循环时间内找出该时刻的第一菲涅尔透镜的最佳光照对应位置;
15、二、所述第一关节舵机复位,第二光电传感器检测光电流值并作为设定值ia,第一关节舵机的角度位置反馈至控制芯片并记录,第一关节舵机顺时针旋转固定角度,检测当前的光电流ib,进行光电流判断;当ib小于ia时,当前的第一关节舵机角度位置不反馈至控制芯片,继续前进;当ib大于或等于ia时,当前的第一关节舵机角度位置反馈至控制芯片并记录,代替上一个舵机角度位置,并将ib赋值给ia,继续前进;转动一个周期后,第一关节舵机运动到最后反馈至控制芯片的角度位置后停止;接着,所述第二菲涅尔透镜转动舵机复位,第二光电传感器检测光电流值赋值给设定值ia,第二菲涅尔透镜转动舵机的角度位置反馈至控制芯片并记录,第二菲涅尔透镜单元顺时针旋转固定角度,检测当前的光电流ib,进行光电流判断;当ib小于ia时,不记录当前的第二菲涅尔透镜转动舵机角度位置,继续前进;当ib大于或等于ia时,当前的第二菲涅尔透镜转动舵机角度位置反馈至控制芯片并记录,代替上一个舵机角度位置,并将ib赋值给ia,继续前进;转动一个周期后,第二菲涅尔透镜转动舵机运动到最后反馈到控制芯片的角度位置后停止。此时即为第二菲涅尔透镜单元的最佳光照强度对应位置;一次循环时间内找出该时刻的第二菲涅尔透镜单元的最佳光照对应位置;
16、三、所述第二关节舵机复位,第三光电传感器检测光电流值并作为设定值ia,第二关节舵机的角度位置反馈至控制芯片并记录,第二关节舵机顺时针旋转固定角度,检测当前的光电流ib,进行光电流判断;当ib小于ia时,当前的第二关节舵机角度位置不反馈至控制芯片,继续前进;当ib大于或等于ia时,当前的第二关节舵机角度位置反馈至控制芯片并记录,代替上一个舵机角度位置,并将ib赋值给ia,继续前进;转动一个周期后,第二关节舵机运动到最后反馈至控制芯片的角度位置后停止;接着,所述第三菲涅尔透镜转动舵机复位,第三光电传感器检测光电流值赋值给设定值ia,第三菲涅尔透镜转动舵机的角度位置反馈至控制芯片并记录,第三菲涅尔透镜单元顺时针旋转固定角度,检测当前的光电流ib,进行光电流判断;当ib小于ia时,当前的第三菲涅尔透镜转动舵机角度位置不反馈至控制芯片,继续前进;当ib大于或等于ia时,当前的第三菲涅尔透镜转动舵机角度位置反馈至控制芯片并记录,代替上一个舵机角度位置,并将ib赋值给ia,继续前进;转动一个周期后,第三菲涅尔透镜转动舵机运动到最后反馈到控制芯片的角度位置后停止。此时即为第三菲涅尔透镜单元的最佳光照强度对应位置;一次循环时间内找出该时刻的第三菲涅尔透镜单元的最佳光照对应位置。
17、四、所述第三关节舵机复位,第四光电传感器检测光电流值并作为设定值ia,第三关节舵机的角度位置反馈至控制芯片并记录,第三关节舵机顺时针旋转固定角度,检测当前的光电流ib,进行光电流判断;当ib小于ia时,当前的第三关节舵机角度位置不反馈至控制芯片,继续前进;当ib大于或等于ia时,当前的第三关节舵机角度位置反馈至控制芯片并记录,代替上一个舵机角度位置,并将ib赋值给ia,继续前进;转动一个周期后,第三关节舵机运动到最后反馈到控制芯片的角度位置后停止;接着,所述第四菲涅尔透镜转动舵机复位,第四光电传感器检测光电流值赋值给设定值ia,第四菲涅尔透镜转动舵机的角度位置反馈至控制芯片并记录,第四菲涅尔透镜单元顺时针旋转固定角度,检测当前的光电流ib,进行光电流判断;当ib小于ia时,当前的第四菲涅尔透镜转动舵机角度位置不反馈至控制芯片,继续前进;当ib大于或等于ia时,当前的第四菲涅尔透镜转动舵机角度位置反馈至控制芯片并记录,代替上一个舵机角度位置,并将ib赋值给ia,继续前进;转动一个周期后,第四菲涅尔透镜转动舵机运动到最后反馈到控制芯片的角度位置后停止。此时即为第四菲涅尔透镜单元的最佳光照强度对应位置;一次循环时间内找出该时刻的第四菲涅尔透镜单元的最佳光照对应位置。
18、基于所述的一种电动汽车用光热发电设备实现,本发明还提供一种控制方法,具体如下:
19、利用flexray总线,把电动汽车的用电使用端和电动汽车的电池实时电量与用电状态传递给检测控制单元,便于对充电储能系统实时控制:在电动汽车运转时,当电动汽车电池的电量高于汽车运转需要的电量时,由所述充电储能系统储存电量,电动汽车的电池给电动车辆用电使用端供电;当电动汽车电池的电量低于汽车运转需要的电量时,由所述充电储能系统为电动汽车用电使用端和电动汽车电池供电;在车辆停止时,所述充电储能系统为电动汽车的电池进行充电,充满时停止充电。
20、本发明的技术效果在于:
21、使用生活中常见的太阳能作为能源来源,增大设备的光利用效率,提高光能转化成内能的效率,提高发电量,为电动车辆充电,防止电动车辆因续航能力不足在行驶过程中停车状况的发生。
- 还没有人留言评论。精彩留言会获得点赞!