加速器踏板系统的制作方法
本公开涉及一种加速器踏板系统。
背景技术:
1、传统上,存在一种已知的系统,其具有巡航控制功能,用于保持车辆的恒定行驶速度。例如,在ep专利no.2384921中,当车辆处于巡航控制模式时,踏板装置产生保持踏板所需的力,使得踏板用作搁脚板。
2、例如,在市区等低速行驶时使用巡航控制模式的情况下,与在受限公路上进行高速行驶的情况相比,存在许多需要根据周围交通状况操作踏板的机会。因此,当在有很多机会操作踏板的情况下(例如在市区)在巡航控制模式下使踏板用作搁脚板时,释放搁脚板状态的次数增加,并且会给驾驶员带来增大的操作负担。
技术实现思路
1、已经鉴于上述问题做出了本公开,并且本公开的目的是提供一种能够适当地控制加速器踏板杆的锁定状态的加速器踏板系统。
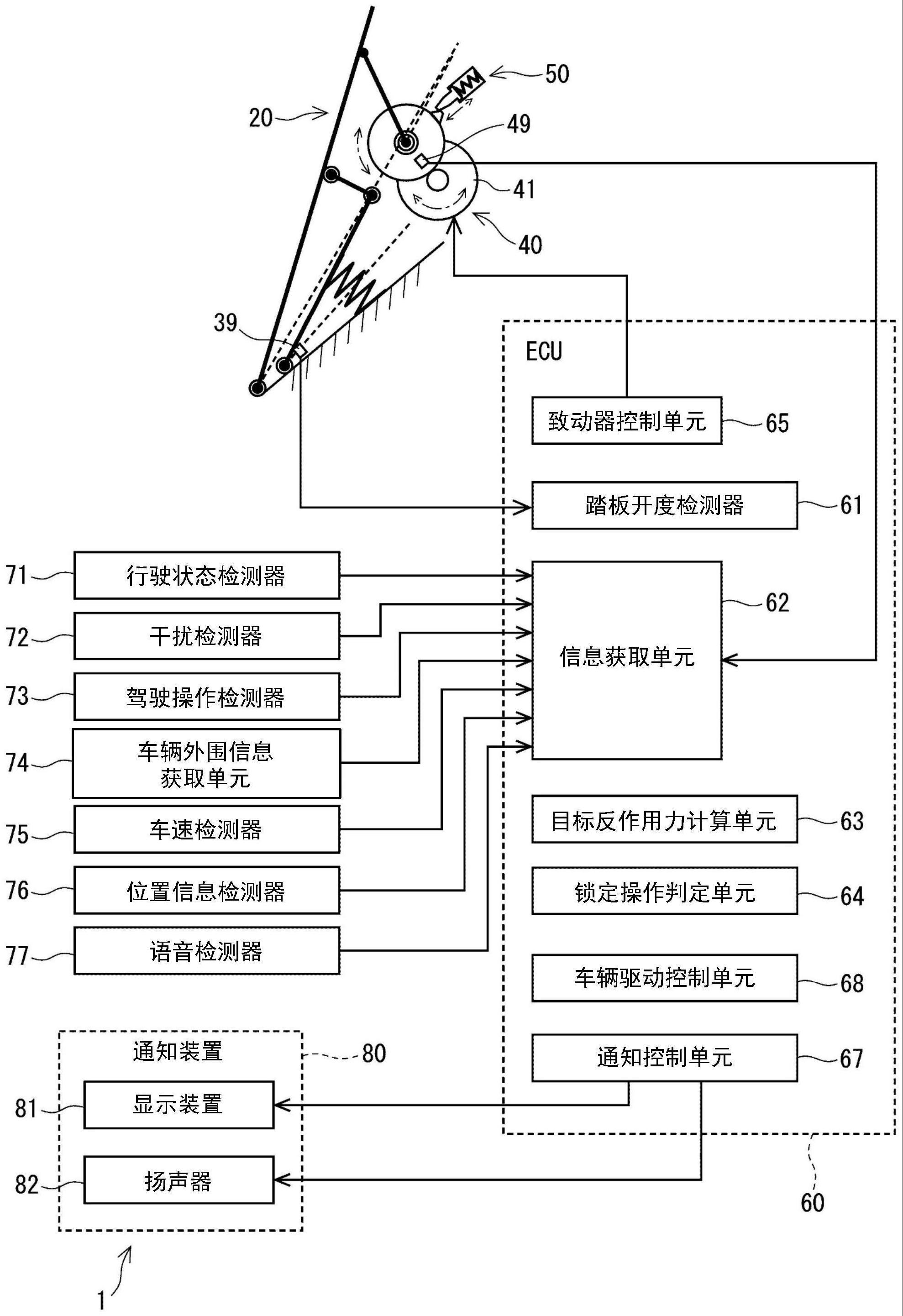
2、根据本公开示例的加速器踏板系统包括:踏板杆、锁定机构、致动器和控制器,其中踏板杆构造成根据踩踏操作来执行操作;锁定机构构造成限制踏板杆的操作;致动器构造成在锁定状态与解锁状态之间切换,在锁定状态下,踏板杆的操作受到锁定机构的限制,在解锁状态下,踏板杆的操作不受锁定机构的限制。控制器包括锁定操作判定单元、致动器控制单元和信息获取单元,锁定操作判定单元构造成判定锁定机构对锁定操作的切换,致动器控制单元构造成控制致动器的驱动操作,信息获取单元构造成获取车速信息。(i)当车辆以自动驾驶模式行驶时以及(ii)当车速等于或大于激活判定下限值时,所述锁定操作判定单元锁定所述踏板杆。因此,可以适当地控制踏板杆的锁定状态。
技术特征:
1.一种加速器踏板系统,包括:
2.如权利要求1所述的加速器踏板系统,其中
3.如权利要求2所述的加速器踏板系统,其中
4.如权利要求1至3中任一项所述的加速器踏板系统,其中,所述锁定操作判定单元基于在所述自动驾驶模式下行驶期间的所述车速还有所述踏板杆的开度来判定所述锁定操作的所述切换。
5.如权利要求1至3中任一项所述的加速器踏板系统,其中,在所述自动驾驶模式下允许锁定所述踏板杆的车速范围包括为在所述自动驾驶模式下行驶而设定的车速。
6.如权利要求1至3中任一项所述的加速器踏板系统,其中,所述控制器包括通知控制单元,其构造成使通知装置通知所述踏板杆被锁定。
7.一种加速器踏板系统,包括:
8.如权利要求7所述的加速器踏板系统,其中
9.如权利要求8所述的加速器踏板系统,其中
技术总结
本公开涉及一种加速器踏板系统,包括:踏板杆(20),其构造成根据踩踏操作执行操作;锁定机构(50),其构造成限制踏板杆的操作;致动器(40),其构造成在锁定状态与解锁状态之间切换,在锁定状态下踏板杆的操作受到锁定机构的限制,在解锁状态下踏板杆的操作不受锁定机构的限制,以及控制器(60)。控制器包括:锁定操作判定单元(64),其构造成判定锁定机构对锁定操作的切换;致动器控制单元(65),其构造成控制致动器的驱动操作;和信息获取单元(62),其构造成获取车速信息。锁定操作判定单元(i)当车辆以自动驾驶模式行驶时以及(ii)当车速等于或大于激活判定下限值时锁定踏板杆。
技术研发人员:吉田优介,木野内惣一,北卓人,森秀之
受保护的技术使用者:株式会社电装
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!